Clear Sky Science · ja
方向依存機械特性と適応センシングのための有機–水ゲルにおける幾何学的プログラム化自己しわ形成
柔らかい材料を“賢く”するしわ
着用できるタッチスクリーンから心拍を聞く医療用パッチまで、次世代のガジェットは皮膚のように柔らかく曲がる一方で、堅牢で信頼できる材料を必要とします。本論文は、材料を成形する過程で制御された自己しわ形成を用いることで、こうした柔らかい材料をより強く、有能にする方法を示します。指紋や皮膚のしわのような微小な隆起と凹みは材料に方向性を与え、単純なゲルを引張り、滑り、温度を感知できる頑強で適応的なセンサーへと変えます。
なぜ柔らかいゲルの改良が必要か
ゲル系材料は柔らかく湿潤で生体親和性があり、塩水のようにイオンを伝導するため、フレキシブルエレクトロニクスや医療機器で既に広く用いられています。しかしその柔らかさ自体が問題で、従来のゲルは裂けやすく、繰り返し曲げると劣化し、センサーとしては常に豊富で安定した信号を与えるとは限りません。研究者たちは、応力を分散して亀裂を防ぐハニカム骨や竹の層状構造など自然の内部構造を模倣することでこれを改善しようとしてきました。皮膚や指紋に触発された表面しわもセンシング向上に使われていますが、通常はゲル作製後の追加処理を必要とし、ゲルの表面のみを変えるにとどまって内部構造まで改変しません。
幾何学にしわを成長させる
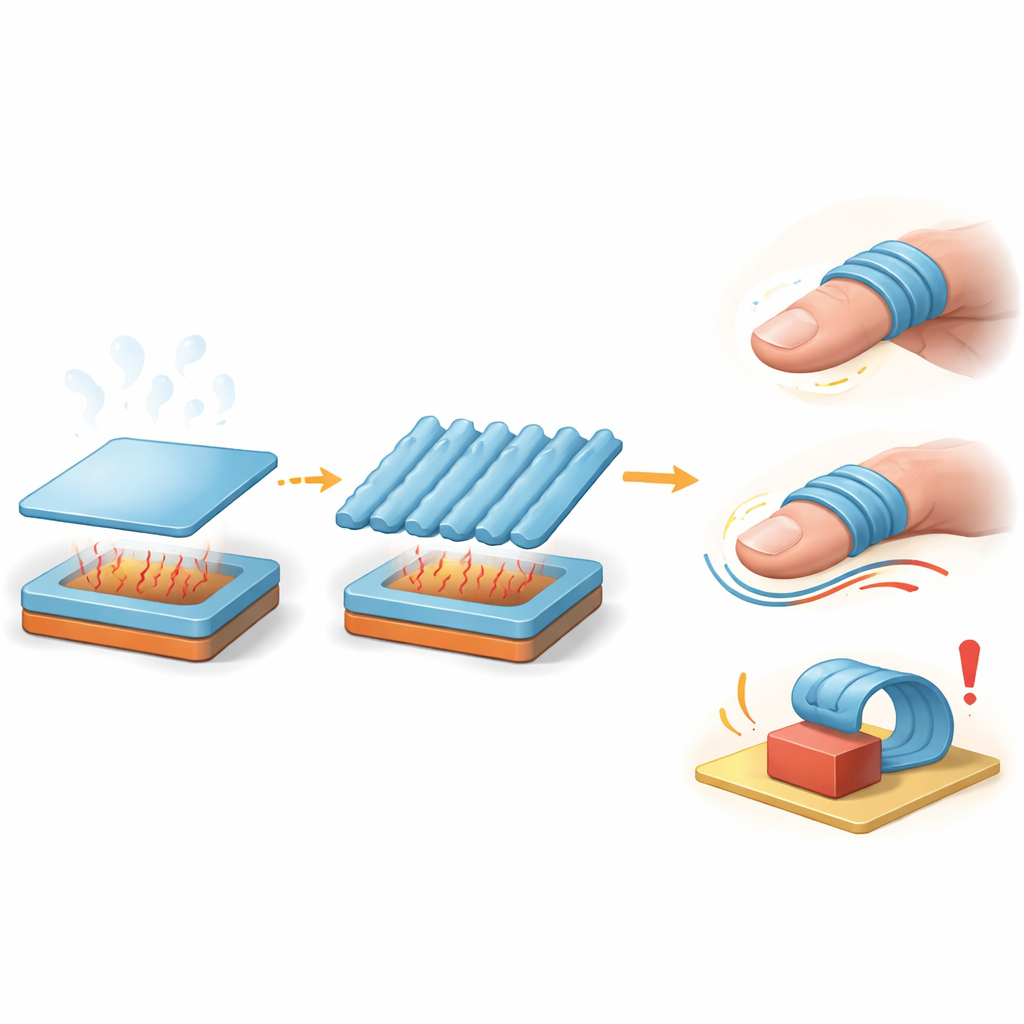
著者らは、材料が形成される過程で起こる「自己しわ形成」アプローチを導入します。まず、ポリビニルアルコールのような一般的な高分子を水、グリセロール、酸化マグネシウムのナノシートなど微量の添加剤と混ぜた溶液から始めます。この液体を長方形、三角形、円形など慎重に選んだ浅い型に流し込みます。型の底面を加熱し、上面は空気にさらすことで溶媒が徐々に蒸発します。上面が乾燥して薄い皮膜が下のより柔らかい層上に形成されると、底が暖かく上が蒸発で冷えるため皮膜に応力が蓄積し、やがてしわとして座屈します。驚くべきことに、型の全体形状がこれらのしわの配列を導きます。たとえば長方形では短辺方向に沿ってしわが走ることがあり、これは薄い曲面シェルの最近の理論とも一致します。
成分でしわの大きさと強度を調整する
しわが現れると、乾燥とゲル化が進むにつれてその波長(間隔)と振幅(高さ)がさらに変化します。グリセロールの量、ナノ添加剤の種類、試料量、さらには型の形状を調整することで、チームはしわの間隔と高さの両方を制御できます。計測により、しわ領域は形状が変わっているだけでなく、微視的レベルで再構築されていることが示されます。稜線内部では高分子鎖がより密に詰まり、より結晶化し、ナノシートとより強く結びついており、平らな領域やしわのないゲルとは異なります。しわの方向に沿って引っ張ると、これらの有機–水ゲルは元の長さの10倍以上まで伸びながら非常に高い応力に耐え、報告されている最も頑丈なゲルの一つに位置づけられます。一方、しわに直交する方向に引くと強度は大幅に低下し、材料の変形と破壊が明確に方向依存することが明らかになります。
電気と動きを導くしわ
しわはイオンの移動経路も誘導し、その結果として電気的挙動に直接影響を与えます。導電率は稜線に沿う方向の方が高く、電気測定はしわ方向に移動するイオンの方が抵抗を受けにくいことを示します。X線散乱は内部構造が稜線に沿ってより整列していることを確認し、より直線的でつながった経路を形成していることを示しています。この組み込まれた異方性(方向による挙動の違い)は、材料を汎用性の高いセンシングプラットフォームに変えます。平坦な部品は伸びや押圧を追跡でき、パターン化された部品は指の滑り方向を各方向の抵抗信号の違いから識別できます。研究者らは簡単なニューラルネットワークを訓練してこれらのパターンを読み取り、しわ付きパッド上の親指の動きをロボットアームのコマンドに変換させることさえ示しました。

巻き上げストリップから熱アラームまで
しわ層が下地のマトリクスより剛性が高いため、加熱により内部応力の不均一が生じ、材料は巻物のように曲がって巻き上がります。二つのしわ付きストリップを接合してこの巻き上げを作動させることで、内側の稜線と外面との接触が複数の導電経路を形成するコンパクトなひずみセンサーを構築しました。やさしく伸ばすとこれらの接触が段階的に離れ、数千回の大きな伸張サイクル後でも安定で低ヒステリシスの信号を生みます。別のデモでは、巻かれたストリップが金属棒を保持し、ある温度になると回路を閉じることで追加の電源を必要とせずに動作する簡易的な熱アラームとして機能しました。
今後のウェアラブル技術に対する意義
要するに、この研究は複雑な加工やパターニングを必要とせず、型の形状と加熱条件を選ぶだけで、柔らかいゲル状材料に補強と方向性を“組み込む”方法を示します。得られる有機–水ゲルはより頑丈であるだけでなく、方向によって伸び、滑り、熱に対する反応が異なります。この幾何学的にプログラムされた自己しわ形成戦略は、より耐久性があり情報量が多く、大規模に製造しやすい次世代のウェアラブルセンサー、ソフトロボット、バイオインターフェースの設計に役立つ可能性があります。
引用: Qi, H., Yang, H., Li, T. et al. Geometry-programmed self-wrinkling in organo-hydrogels for anisotropic mechanics and adaptive sensing. Nat Commun 17, 3773 (2026). https://doi.org/10.1038/s41467-026-70433-z
キーワード: 自己しわ形成ハイドロゲル, フレキシブルセンサー, 異方性機械特性, イオン伝導性ゲル, ソフトロボティクス材料