Clear Sky Science · ja
電界流体成形で印刷した超高性能液体金属ひずみセンサー
あらゆる動きを感じる伸縮性ワイヤ
指先のわずかな曲げや脈拍のかすかな鼓動さえ、切れたり接触を失ったりせずに感知できる柔らかく弾性のあるバンドを想像してください。本論文は、金属の導電性とゴムの伸縮性を組み合わせ、将来のウェアラブル機器、スマートウェア、ソフトロボットの“神経”として働く超薄い液体金属ワイヤを印刷する新しい方法を紹介します。
液体金属の特異性
多くの電子機器は剛性のある金属や固いチップで作られており、肘の曲げや皮膚の伸縮とは相性が良くありません。室温で流体でありながら固体金属に近い導電性を持つ液体金属は、このミスマッチを解消する手段を提供します。液体金属は柔らかい材料とともに伸びたりねじれたり変形したりできるため、次世代のウェアラブルセンサーや人間–機械インターフェースに最適です。しかしこれまで、液体金属を極めて細く精密なラインとして漏れや粗い縁、複雑な金型を伴わずに描くのは難しく、デバイスの高密度化や高感度化が制約されてきました。
電気で金属を印刷する
この課題に対処するために、研究者らは電界を利用して特殊な液体金属インクの微小なジェットを細い針先から柔らかいプラスチック表面に引き出す電気流体力学印刷(electrohydrodynamic printing)という技術を用いています。電圧、インク流量、基板の動きを調整することで、1つのノズルから幅30〜300マイクロメートル(人間の髪の毛より細い)の連続した液体金属マイクロワイヤを数メートルの長さにわたって描くことができます。ワイヤは必要な場所に直接配置され、後で柔軟なプラスチックフィルム間に完全に封入されるため、中空チャネル法で一般的な気泡や漏れのリスクが大幅に減少します。 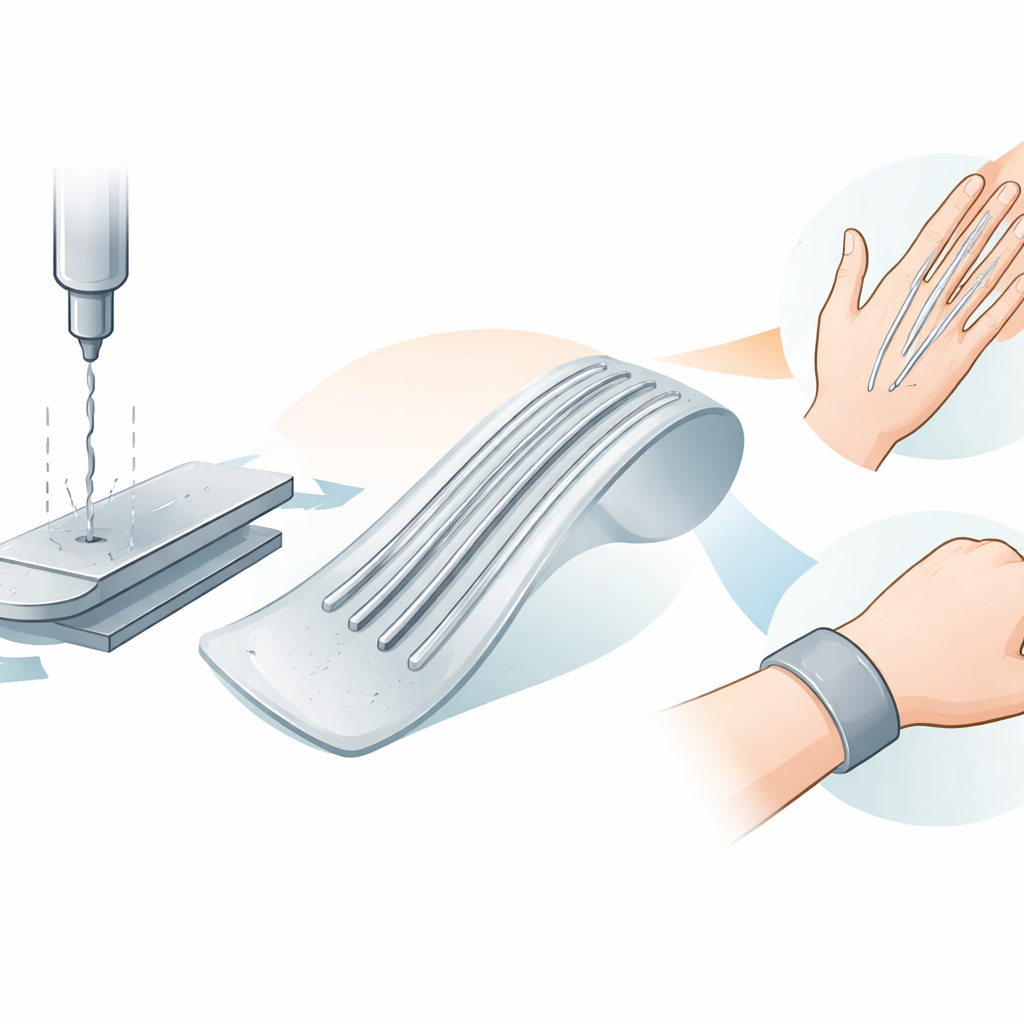
伸ばすと目覚める隠れた金属ビーズ
この印刷可能なインクの鍵はその微視的構造にあります。滑らかな液体の塊ではなく、研究チームはガリウム–インジウム合金の微小な液滴を支持流体中に分散させ、さらにそれらを保持するポリマーやプラスチック粒子を混ぜています。各液滴は薄い金属酸化物の堅い皮膜で覆われており、それによって液滴同士がすぐには合体せず、印刷直後のワイヤはほとんど導電的でない状態になります。しかし、この液滴を含む柔軟なストリップを引き伸ばすと、液滴が変形して堅い皮膜が割れます。内部の液体金属が流れ出して隣接する液滴とつながり、ストリップ内に連続した金属経路が形成されます。電子顕微鏡、コンピュータシミュレーション、および精密な力学測定により、孤立したビーズから連続した光沢ある金属の糸へと移行する様子が確認されています。
微小な伸びから日常の過酷な使用まで
活性化されると、これらの液体金属マイクロワイヤは非常に高感度なひずみセンサーとして機能します。ワイヤが極めて細いため、長さがわずか2.5センチのうち2マイクロメートルの変化(ひずみで約0.008%)でも電気抵抗に測定可能な変化をもたらします。ストリップをさらに元の長さの最大3倍まで伸ばすと、金属経路は細く伸び、抵抗は基本的な電気法則に従って制御されたほぼ直線的な変化を示します。試験では、ワイヤが大きなひずみ下で何千回もの伸縮サイクルに耐え、破断や漏れ、性能のドリフトを起こさずに安定していること、そして数か月にわたり安定性を保つことが示されています。柔らかいプラスチック支持体は後で溶解させて液体金属を回収・再利用することもでき、リサイクルや資源効率の目標にも合致します。 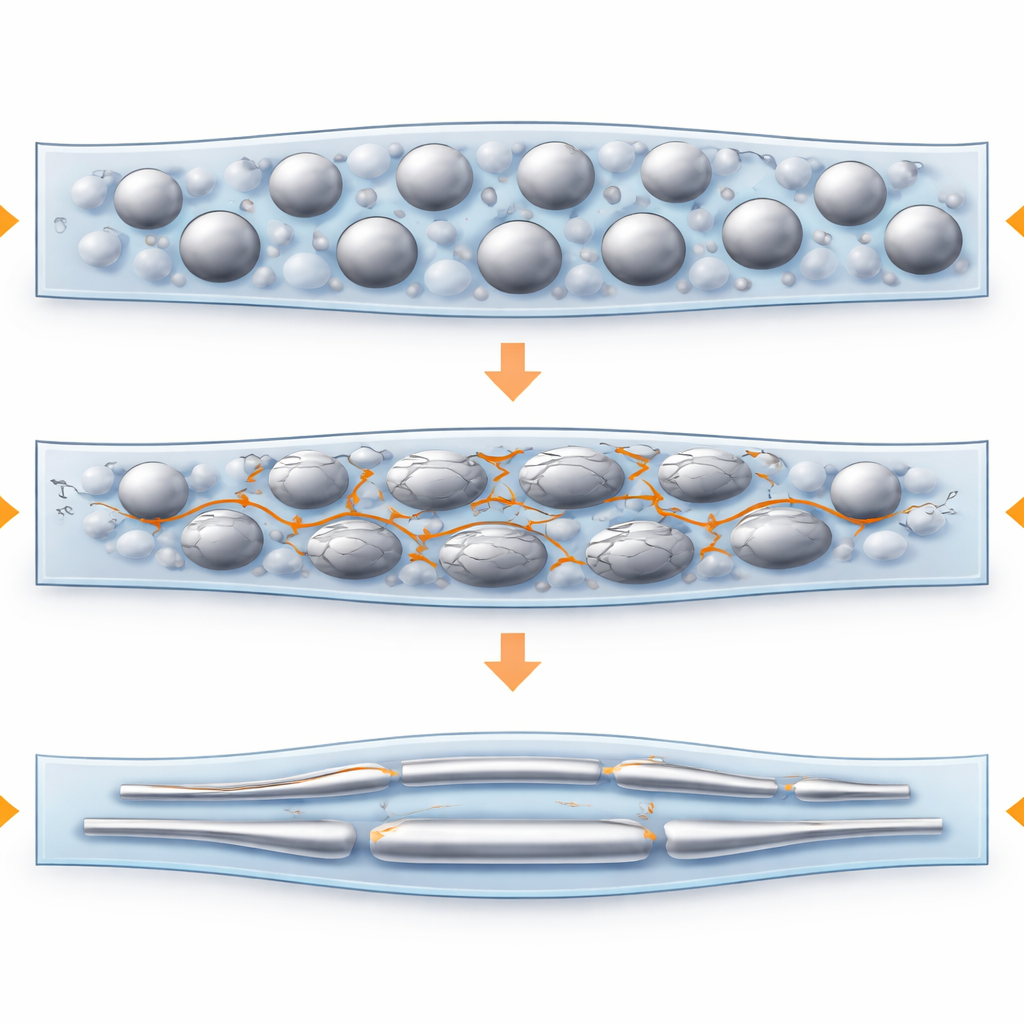
語る手、聞く皮膚
これらの印刷ワイヤの能力を示すために、著者らは動きを信号に変える簡単なデバイスを作成しました。1つのデモでは、細いセンサーが手の指に沿って5本取り付けられています。指が数字を示すように曲がると、それぞれのワイヤの抵抗が特徴的に変化し、小さな電子基板がそれを読み取りワイヤレスで送信できます。これによりロボットアームが人の手の形を模倣でき、遠隔操作や仮想インタラクションへの応用が示唆されます。別の試験では、手首近くに優しく巻いた単一のセンサーが脈拍による皮膚の微小な膨張を追跡しました。変化する電気信号は心拍の異なる位相を明確に示し、運動後のより速く強い脈にも反応して、身体上の弱いかつ動的なひずみを捉えられることを示しています。
より賢く柔らかい電子機器への一歩
要約すると、本研究は超薄く長い液体金属ワイヤを高精度で「描く」実用的な手法と、それを極めて感度が高く耐久性があり再利用可能な伸縮センサーに変える方法を示しています。一般的な読者への結論としては、研究者たちは我々の皮膚や筋肉のように動き、感じる電子機器に一歩近づけたということであり、将来的には手を動かすだけでロボットを制御したり、不快な剛性ハードウェアなしに健康信号を継続的に監視したりできるデバイスの実現に寄与する可能性があります。
引用: Chen, X., Feng, Y., Chen, K. et al. Electrohydrodynamic printed ultra-high performance liquid metal strain sensor. Microsyst Nanoeng 12, 145 (2026). https://doi.org/10.1038/s41378-026-01237-w
キーワード: 液体金属, 柔軟センサー, ウェアラブル電子機器, ひずみ検出, ソフトロボティクス