Clear Sky Science · he
שחזור תנועת ריקוד באמצעות מודל מטריצה דו‑ממדי ואופטימיזציית Haute Monde Chimp
כשריקוד פוגש תובנה דיגיטלית
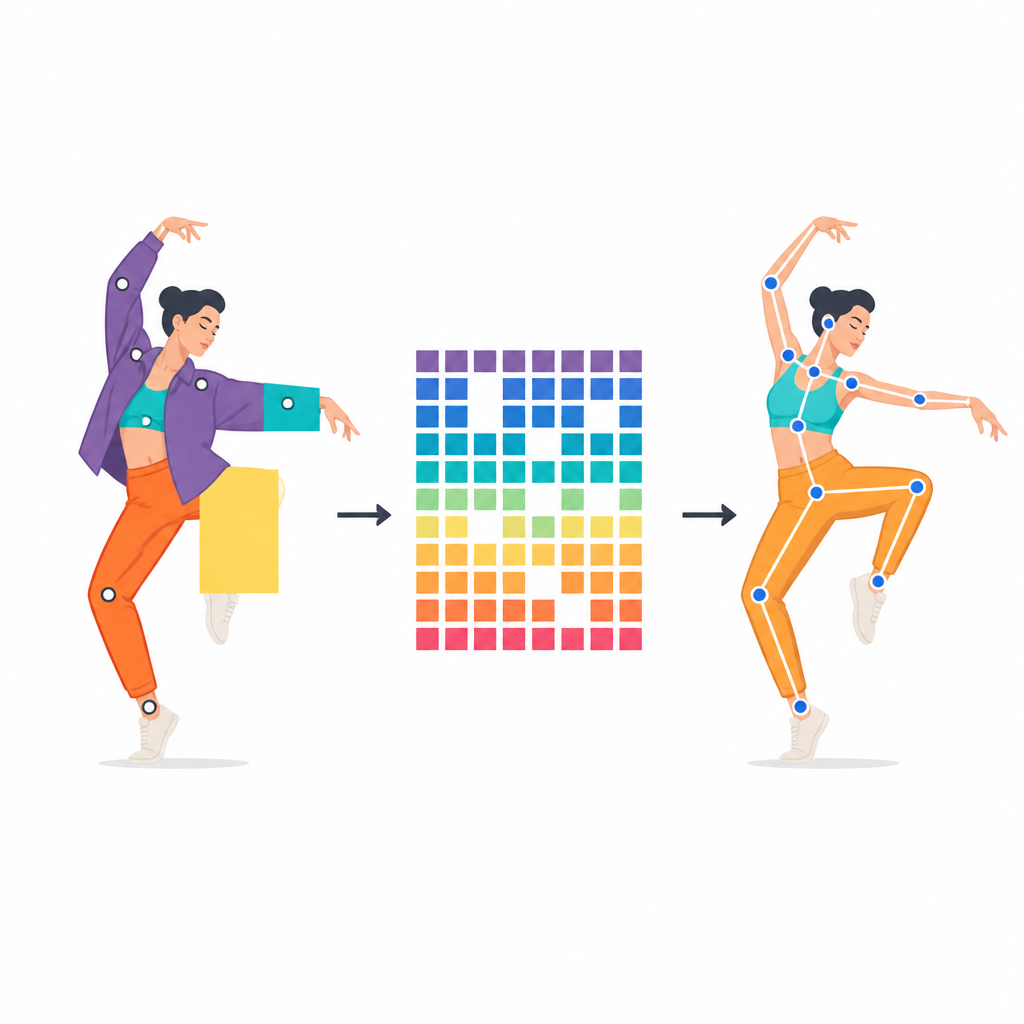
מאחורי כל סיבוב מלוטש על הבמה מסתתר סערת תנועה בלתי נראית שקשה להפתיע לתפוס. מחקר זה חוקר כיצד להקליט ולבנות מחדש תנועות ריקוד מורכבות כאשר מצלמות וחיישנים מפספסים חלקי גוף — בין אם בגלל תלבושות זורמות, סיבובים מהירים או תנוחות יוצאות דופן. על ידי שילוב רעיונות ממתמטיקה ומהשראה מבוססת טבע לחיפוש ממוחשב, המחברים מציעים דרך להפוך הקלטות רועשות ולא שלמות לתנועות רציפות ונקיות, שעשויות לסייע כוריאוגרפים, אנימטורים, מעצבי משחקים ומומחי שיקום כאחד.
למה קשה להקליט ריקוד
מערכות תפיסת תנועה מודרניות מבטיחות להפוך רקדנים לזרמי נתונים דיגיטליים, אך הופעות אמיתיות נדירות מתנהגות כמו הדגמות במעבדה. גפיים מסתירות זו את זו, בדים רופפים מחביאים מפרקים והרקדנים ממציאים תנועות שמסובבות מעבר לתבניות פשוטות. כתוצאה מכך, הנתונים לעיתים קרובות כוללים חורים שבהם מפרקים נעלמים ונתיבים המתעקלים באופן בלתי ליניארי לאורך זמן. כלים קודמים, כגון רשתות נוירונים, שיטות מטריצה בדירוג נמוך או מצלמות עומק כמו Kinect, יכולים להתמודד עם קליפים קצרים או מחוות פשוטות, אך אין להם ערובות מוצקות לשחזור נכון של התנועה המלאה כשהריקוד נעשה מסובך והנתונים בלתי מסודרים.
דרך חדשה לייצוג תנועה
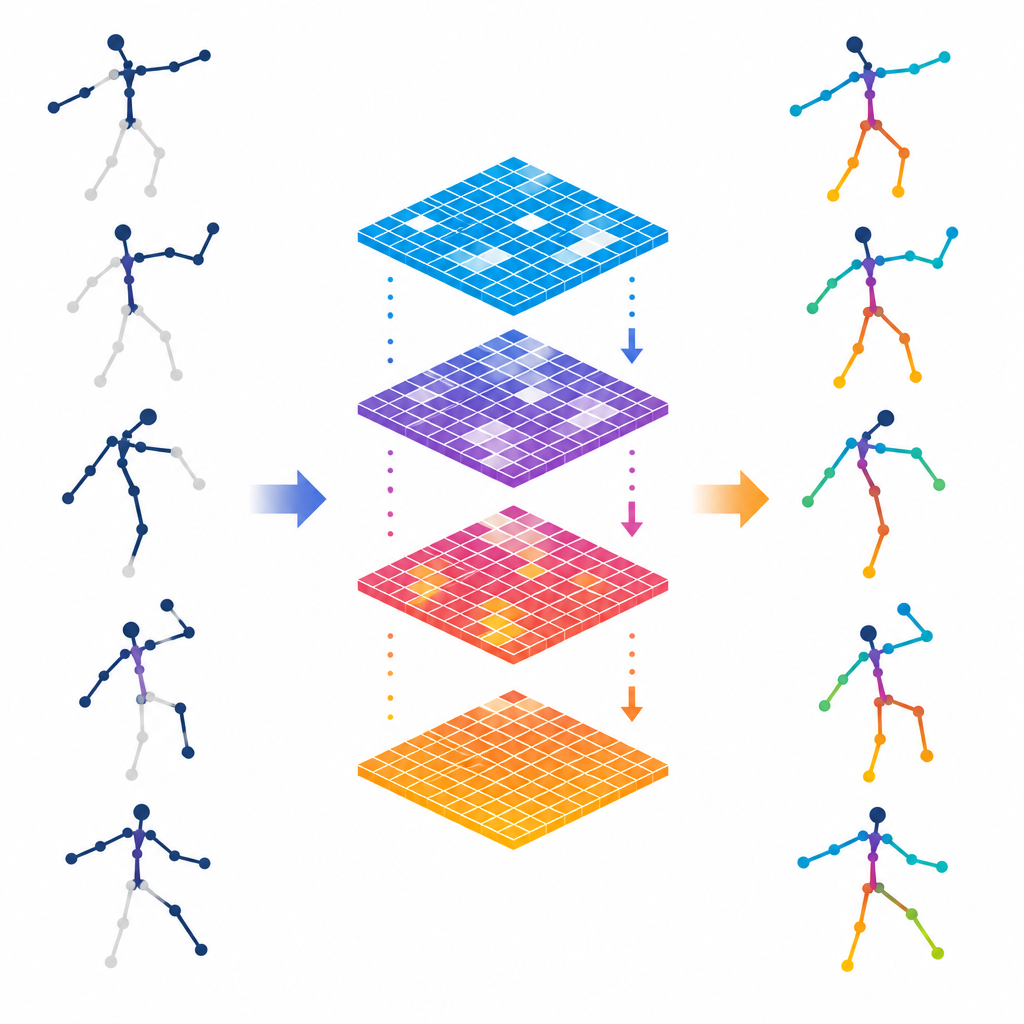
כדי להתמודד עם זאת, המחברים מציגים מודל חישוב מטריצי רב‑ממדי שטופל בתנועת אדם כאובייקט גאומטרי מורכב ולא רק כרשימת קואורדינטות מפרקים. בגישה זו, שלד הרקדן מתואר כנטוורק של מפרקים במרחב תלת‑ממדי, וכל תנוחה ממופה על פני משטח מתמטי מעוקל שמשקף טוב יותר כיצד מפרקים מסתובבים בפועל. תנוחות אלו מאורגנות לאחר מכן למטריצה גדולה שערכיה מתארים כיצד חלקי הגוף זזים יחד לאורך זמן. מפרקים חסרים מופיעים כרשומות ריקות, מה שהופך את שחזור התנועה למשחק של "מילוי חכם" במטריצה זו. על‑ידי עיצוב המודל להעדיף מבנים פשוטים בדירוג נמוך באופן זהיר, השיטה מחפשת את תנועת המלאה הקוהרנטית ביותר שמתאימה לנתונים החלקיים.
חיפוש בהשראת הטבע עם שימפנזים דיגיטליים
העמוד השני של העבודה הוא אסטרטגיית חיפוש הקרויה Haute Monde Chimp Optimization Algorithm. בהשראת האופן שבו שימפנזים משתפים פעולה בציד, הגישה מדמיינת מועמדי פתרון רבים נודדים במרחב של הגדרות המודל האפשריות. חלק ממלאים את תפקידי המנהיגים, אחרים משמשים כנהגים או מכשולים, והשפעתם משתנה ככל שהחיפוש מתקדם. בניגוד לגרסאות קודמות של רעיון זה, שהעניקו לכל מנהיג משקל שווה או שינו רק פרמטרים מספריים, האלגוריתם החדש מציג היררכיה בין התפקידים ומתאם קפיצות ארוכות עם התאמות מקומיות עדינות. מבנה זה מאפשר לו להתמקד בעוצמה רבה יותר באזורים מבטיחים של מרחב החיפוש תוך שמירה על חקירה של חלופות — דבר קריטי כאשר נוף התנועות האפשריות מלא מלכודות מקומיות.
בחינת המערכת
המסגרת המשולבת, שנקראת MMC-HMCOA, נבדקה על תנועות דמויי‑ריקוד המיוצגות באמצעות מודל גוף דיגיטלי סטנדרטי. המחברים שינו את מורכבות התנועות, את מספר "הצמתים" הממוחשבים במודל וכמות הנתונים החסרים. הם השוו את שיטתם למספר בסיסים ידועים, לרבות רשתות חוזרת (RNN), כלים סטנדרטיים להשלים מטריצות, גישה מולטימודלית לנתונים, מעקב מבוסס Kinect וגרסה של מודל המטריצה שלהם ללא אסטרטגיית החיפוש החדשה. בתנאים מגוונים, MMC-HMCOA השיגה בעקביות דיוק גבוה יותר, שגיאה נמוכה יותר ויכולת טובה יותר להבחין בין שחזורים נכונים ושגויים, ובנוסף נשארה יציבה גם כשנמחקו עד חצי מנקודות הנתונים.
מה זה אומר לריקוד ולתחומים אחרים
ללא‑מומחה, המסקנה העיקרית היא שהמחברים מצאו דרך עקרונית "לתקן" הקלטות שבורות של תנועת אדם כך שהריקודים הדיגיטליים התוצאה ייראו טבעיים ומלאים. בזיווג של תיאור תנועה שמכבד כיצד גופים נעים באמת עם חיפוש מאורגן ושיתופי בהשראת התנהגות חיה, המערכת מסוגלת לשחזר פרטים עדינים ששיטות אחרות מפספסות. למרות שהמחקר מתמקד בריקוד, אותן רעיונות יכולים לחול בכל מקום שבו נצטרך לעקוב אחרי אנשים באמינות למרות הסתמקות ורעש — ממציאות מדומה וניתוח ספורט ועד רובוטיקה והערכה קלינית של תנועה.
ציטוט: Liang, D., Khishe, M., Alenizi, F.A. et al. Dance movement reconstruction via a 2D matrix model and Haute Monde Chimp Optimization. Sci Rep 16, 14989 (2026). https://doi.org/10.1038/s41598-026-44993-5
מילות מפתח: תפיסת תנועת ריקוד, שחזור תנועת אדם, אלגוריתם אופטימיזציה, מודל מטריצה, אנימציה ממוחשבת