Clear Sky Science · fr
Un nouveau design en spirale logarithmique pour l’arthroplastie de l’articulation interphalangienne proximale
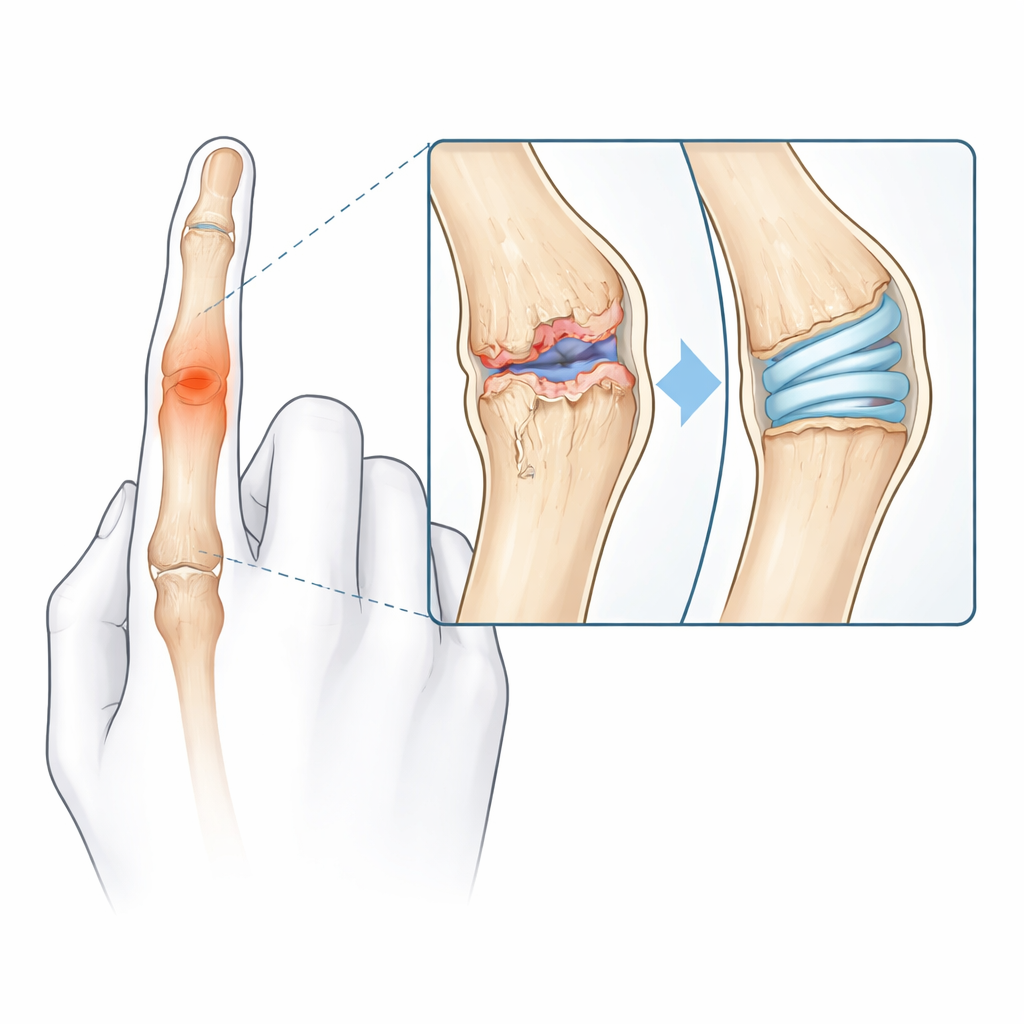
Pourquoi une nouvelle articulation du doigt compte
Beaucoup de personnes développent des doigts douloureux et raides avec l’âge, en particulier aux articulations intermédiaires qui nous permettent de tenir une clé, taper au clavier ou boutonner une chemise. Lorsque ces articulations s’usent, les chirurgiens peuvent soit fusionner les os, ce qui supprime le mouvement, soit remplacer l’articulation par une prothèse artificielle. Les implants actuels ne reproduisent souvent pas la mobilité d’un doigt sain, entraînant une flexion limitée, de l’inconfort ou des défaillances de l’appareil. Cette étude présente un nouvel implant pour l’articulation moyenne du doigt, conçu autour d’une courbe mathématique gracieuse appelée spirale, dans le but de rapprocher le comportement des articulations artificielles de celui des articulations naturelles.
Comment les doigts s’articulent réellement
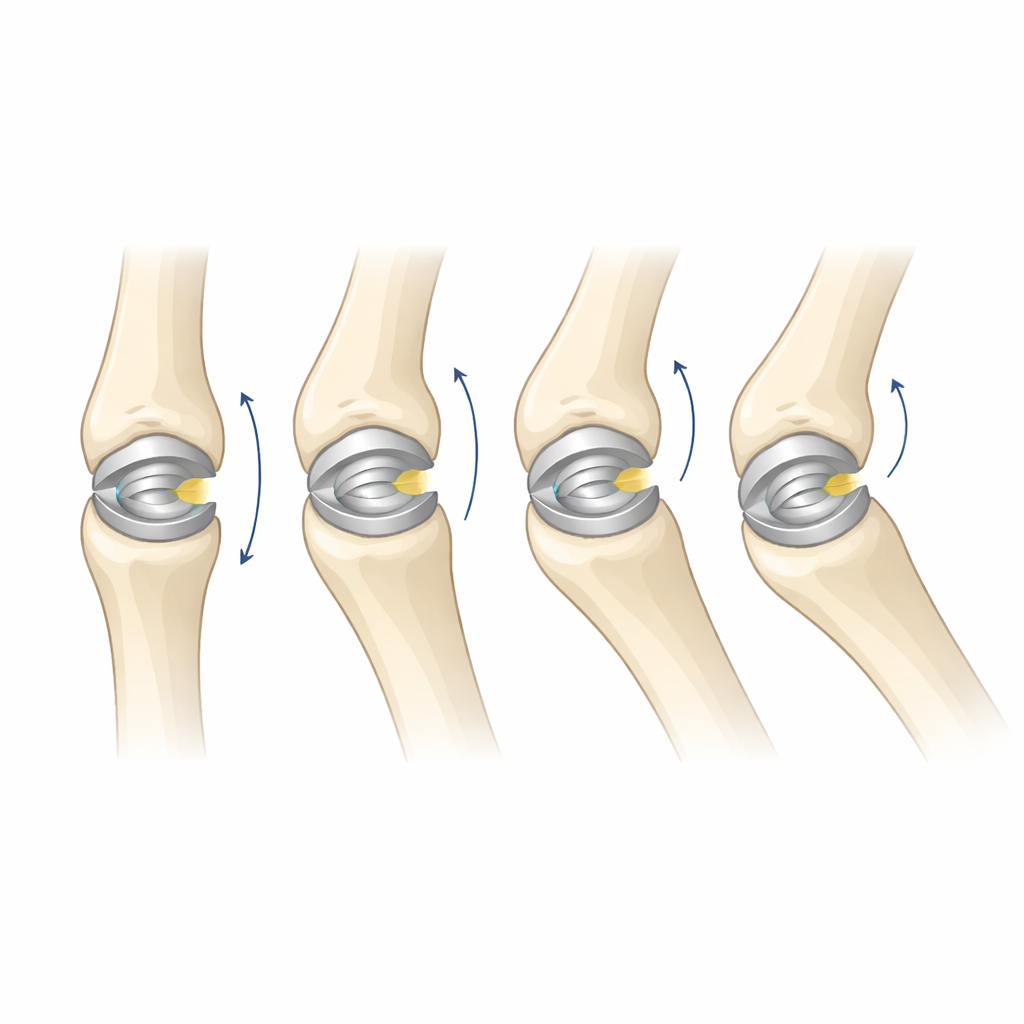
L’articulation moyenne de chaque doigt — l’interphalangienne proximale, ou IPP — ne fonctionne pas comme une simple charnière. Quand on plie un doigt, les surfaces articulaires roulent, glissent et effectuent de subtiles rotations tridimensionnelles. Le centre de rotation se déplace en fait le long d’un trajet en forme de tire‑bouchon, et pourtant, malgré cette complexité, la trajectoire suivie par la pointe du doigt lorsqu’elle se replie vers la paume décrit une spirale très régulière. Les implants antérieurs traitaient l’articulation comme une charnière fixe à section circulaire, ignorant ce mouvement spiralé naturel et la grande variabilité des formes de doigts entre les individus. Ce décalage explique en partie pourquoi de nombreux patients se retrouvent avec des articulations raides et au toucher peu naturelles après une arthroplastie standard.
Conception d’une articulation en forme de spirale
Pour mieux reproduire la nature, l’équipe de recherche a analysé avec soin des scans 3D de 100 os de doigts sains. À partir de ces données, ils ont créé une forme moyenne pour la tête de la phalange et la base de la phalange voisine, en tenant compte des largeurs, des courbures aux angles et du canal interne qui reçoit la tige de l’implant. Ils ont ensuite remodelé la surface de glissement du nouvel implant de sorte que, en vue latérale, elle suive une spirale logarithmique — un type de courbe qui conserve un angle constant en s’enroulant vers l’intérieur. En termes pratiques, cela confère à l’articulation un centre de rotation unique et stable et garantit que la direction des forces à travers l’articulation reste cohérente pendant la flexion, tout en reproduisant la même trajectoire spirale que suit naturellement la pointe du doigt.
Tester l’idée sur des articulations virtuelles
Avant d’essayer sur des tissus humains, l’équipe a évalué le comportement de l’articulation en spirale dans un modèle informatique. Ils ont construit des modèles 3D détaillés des pièces métalliques et plastiques de l’implant et simulé le mouvement de l’articulation de la position droite à la flexion maximale sous une charge douce et réaliste. L’analyse s’est concentrée sur deux mesures critiques : la répartition de la pression au point de contact des deux pièces et l’écart entre les surfaces lors du glissement. Sur l’ensemble de l’amplitude de flexion, le design en spirale a maintenu une répartition de la pression relativement uniforme et un écart entre les surfaces quasi constant. À l’approche d’une flexion prononcée d’environ 105 degrés, la courbure de la spirale ralentissait le mouvement de glissement, agissant comme un frein naturel qui réduit les sollicitations soudaines sur les surfaces articulaires.
Essai de l’implant sur de vrais doigts
Les chercheurs ont ensuite implanté le dispositif dans des doigts humains conservés qui gardaient une souplesse et une mobilité réalistes. Les chirurgiens ont préparé les os de la même manière que lors d’opérations réelles et inséré des versions de l’implant aux dimensions adaptées. Lorsque le tendon fléchisseur a été tiré avec une force contrôlée pour imiter l’action musculaire, toutes les articulations traitées ont fléchi de plus de 100 degrés — dans la fourchette normale d’une IPP vivante — tout en se redressant complètement ou presque. Des séquences radiographiques ont montré que le point de contact entre les surfaces de l’implant demeurait dans une bande centrale pendant le mouvement, sans errer de façon imprévisible. Dans un test séparé utilisant un capteur de pression fin placé entre les pièces, la force globale à travers l’articulation est restée stable durant la majeure partie de la flexion, corroborant la prédiction informatique d’un contact lisse et stable.
Ce que cela pourrait signifier pour les patients
Cette étude suggère que modeler une prothèse d’articulation du doigt autour d’une spirale, plutôt que d’un simple cercle, pourrait aider l’articulation artificielle à glisser de façon plus naturelle. En maintenant un contact homogène et un mouvement fluide tout au long de la flexion, le concept pourrait un jour offrir aux patients une plus grande amplitude de mouvement, moins d’usure de l’implant et éventuellement un soulagement de la douleur plus durable. Toutefois, ces résultats proviennent de simulations et d’essais sur des doigts de cadavres, non sur des patients vivants, et le travail n’a pas encore mesuré l’adaptation des ligaments et des muscles environnants au fil du temps. Des essais cliniques et des comparaisons directes avec les implants existants seront nécessaires avant que les chirurgiens puissent déterminer si cette articulation basée sur une spirale améliore réellement la fonction quotidienne des personnes souffrant d’arthrite douloureuse des doigts.
Citation: Hirata, H., Kurimoto, S., Yoneda, H. et al. A novel logarithmic spiral design for proximal interphalangeal joint arthroplasty. Sci Rep 16, 13266 (2026). https://doi.org/10.1038/s41598-026-45687-8
Mots-clés: remplacement d’articulation du doigt, arthrose de la main, conception de prothèse articulaire, biomécanique, implant en spirale logarithmique