Clear Sky Science · fr
Optimisation de la programmation du sommeil dans les réseaux de capteurs sans fil via l’utilité des nœuds et la priorisation des cibles critiques
Pourquoi il est important de garder éveillés ces petits sentinelles numériques
Des fermes intelligentes aux alarmes contre les feux de forêt, les réseaux de capteurs sans fil veillent discrètement sur notre environnement. Ces dispositifs dispersés et alimentés par batterie mesurent la chaleur, le mouvement, la pollution et plus encore, puis renvoient les données vers un point central. Mais il y a un revers : lorsque leurs batteries tombent à plat, le réseau devient aveugle. Cet article aborde une question apparemment simple mais aux enjeux pratiques importants — comment décider lesquels des capteurs doivent rester actifs et lesquels peuvent dormir en toute sécurité, afin de continuer à observer tout ce qui nous importe aussi longtemps que possible ?
Le défi de tout surveiller en permanence
Dans de nombreux déploiements réels, des dizaines voire des centaines de capteurs observent la même zone ou un ensemble de points importants, tels que des ponts, des vannes ou des réservoirs chimiques. Allumer tous les capteurs à la fois garantit une bonne couverture, mais gaspille de l’énergie et réduit la durée de vie de l’ensemble du réseau. Pire encore, les capteurs réels ne se comportent pas comme des ampoules parfaites qui voient totalement ou pas du tout une cible. Leur capacité de détection diminue avec la distance et avec l’usure de la batterie, ce qui fait de la couverture une question de probabilité, et non de certitude. Les méthodes de planification existantes peinent face à cette réalité complexe. Elles maintiennent souvent trop de capteurs redondants actifs, ne protègent pas suffisamment les quelques capteurs qui surveillent des zones difficiles à couvrir et ignorent l’énergie restante de chaque nœud, ce qui conduit à l’apparition de zones aveugles plus tôt que nécessaire.
Une manière plus intelligente de répartir la charge
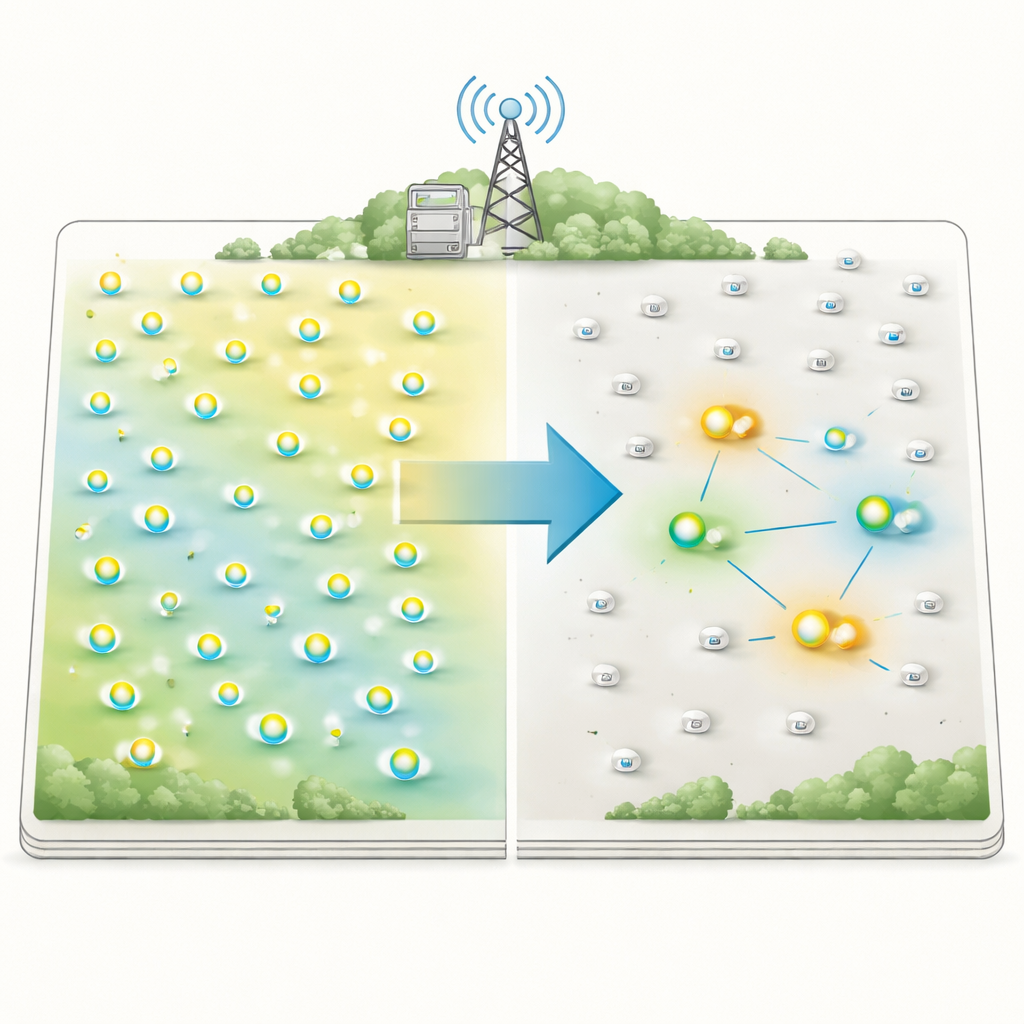
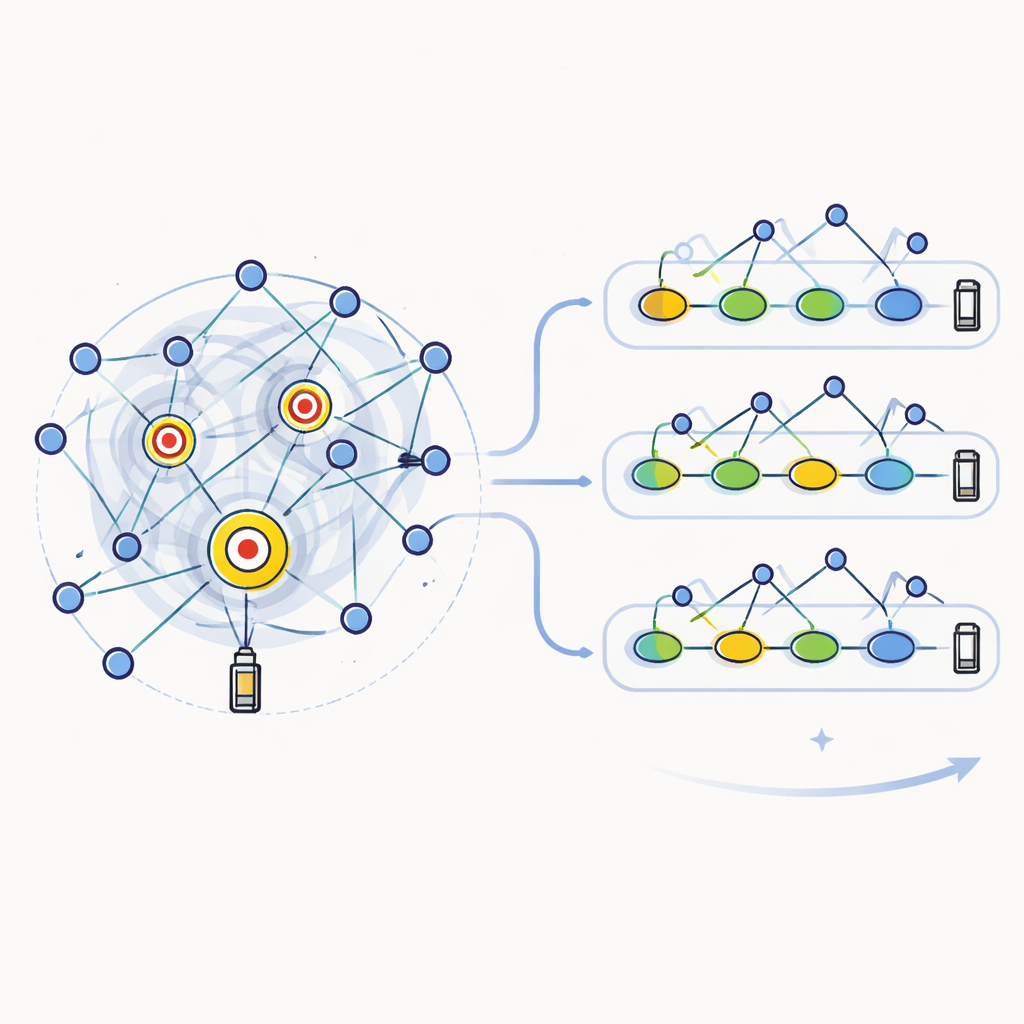
Les auteurs proposent une nouvelle stratégie de programmation du sommeil qui considère le réseau un peu comme un réseau électrique urbain : elle identifie les goulots d’étranglement, répartit la charge et n’active que ce qui est réellement nécessaire. D’abord, ils améliorent le modèle de détection pour que la probabilité qu’un capteur détecte une cible dépende non seulement de la distance, mais aussi de son énergie restante. Cela crée une représentation « probabilité–énergie » de la couverture, plus fidèle au comportement réel du matériel au fil du temps. Ils segmentent ensuite le vaste réseau en régions plus petites et indépendantes de capteurs et de cibles qui interagissent effectivement entre elles. Cette étape, appelée ensemble hiérarchique de couvertures disjointes, transforme un énorme problème global difficile en de nombreux sous-problèmes plus petits qui peuvent être résolus beaucoup plus efficacement.
Détecter les points faibles et choisir les bons renforts
Au sein de chaque région, la méthode recherche le maillon le plus faible : la cible la plus à risque de perdre sa couverture parce qu’elle ne dépend que de quelques capteurs épuisés. Cette cible devient celle à protéger en priorité, la « critique ». Pour les capteurs qui peuvent voir cette cible critique, l’algorithme calcule un score d’utilité simple qui combine l’énergie restante de chaque nœud et le nombre de cibles actuellement non couvertes qu’il peut aider à surveiller. À chaque tour, le capteur ayant la plus haute utilité autour de la cible la plus faible est activé, et la carte de couverture est mise à jour. Au fil du temps, différents capteurs se relaient pour porter la charge, garantissant que les points difficiles à couvrir ne sont jamais oubliés tandis que la consommation de batterie reste équilibrée.
Mettre le plan à l’épreuve
Pour vérifier l’efficacité de cette stratégie, les auteurs réalisent des expériences informatiques sur des réseaux de tailles et de configurations variées, et comparent leur approche — appelée UCTF-SS — à plusieurs méthodes de planification bien connues, y compris le choix aléatoire, la sélection gloutonne basée sur l’énergie, des schémas de clustering, une méthode de transfert d’énergie sans fil et un algorithme génétique. Ils mesurent combien de temps le réseau maintient une couverture totale ou quasi-totale, combien de nœuds doivent être éveillés à chaque tour, et à quel point l’énergie est consommée de manière uniforme. Globalement, UCTF-SS prolonge la vie du réseau, soutient une couverture plus élevée et répartit la décharge des batteries plus uniformément, le tout en n’activant qu’une petite fraction des capteurs à un instant donné.
Ce que cela signifie pour les déploiements réels de capteurs
Concrètement, l’étude montre qu’il est possible de maintenir la surveillance de points critiques beaucoup plus longtemps en choisissant stratégiquement quels capteurs garder actifs et en accordant une attention particulière aux parties les plus fragiles du réseau. En se concentrant sur les cibles faiblement protégées, en faisant tourner les capteurs selon leur utilité et leur énergie restante, et en simplifiant le réseau en régions plus petites, la méthode proposée étire les batteries limitées sans sacrifier la vigilance. Pour les concepteurs de villes intelligentes, d’installations industrielles et de systèmes de surveillance environnementale, cela se traduit par moins de remplacements de batterie, des données plus fiables et des réseaux de capteurs qui vieillissent en douceur au lieu de tomber en panne par zones soudaines d’obscurité.
Citation: Wu, J., Tian, S., Qi, X. et al. Optimizing sleep scheduling in wireless sensor networks via node utility and critical target prioritization. Sci Rep 16, 10389 (2026). https://doi.org/10.1038/s41598-026-40548-w
Mots-clés: réseaux de capteurs sans fil, surveillance économe en énergie, programmation du sommeil, couverture des cibles, durée de vie du réseau