Clear Sky Science · en
Multivector model predictive control for multiphase induction machines with dead-time knowledge
Why this matters for cleaner electric power
As cars, planes and industrial machines go electric, engineers are pushing motors and power electronics to deliver more power, higher efficiency and rock-solid reliability. One promising route is to use motors with more than the usual three wires feeding them, along with smart digital control. But a tiny safety delay inside the power electronics, known as dead time, quietly disturbs the flow of electricity and wastes energy—especially as control gets faster. This study shows how to teach a modern control algorithm to anticipate that delay, cutting electrical noise and losses in a six-phase motor drive without extra hardware.
More motor wires, more control possibilities
Instead of the conventional three-phase motor, the authors focus on a six-phase induction machine: in simple terms, two three-wire stator windings shifted slightly in space and powered from a shared direct-current source. This arrangement offers important advantages for demanding applications like electric vehicles and aircraft—greater fault tolerance, better power density and higher efficiency. The price is added complexity: the extra wires create additional internal paths, or "subspaces", where unwanted currents can circulate and turn into heat rather than useful torque. Modern digital signal processors now make it feasible to handle this complexity in real time.
Smart prediction and the hidden role of dead time
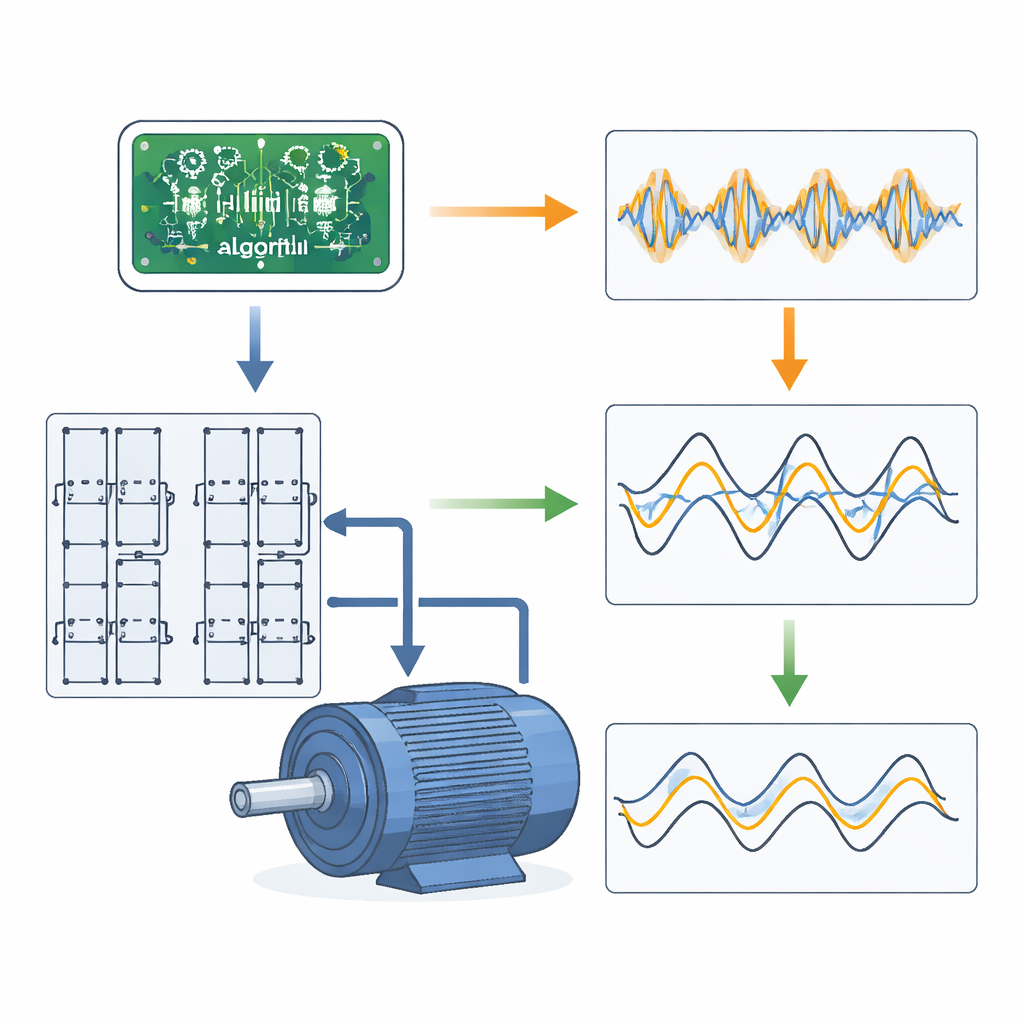
A leading method for commanding such drives is finite control set model predictive control. Instead of slowly nudging voltages toward a reference, this scheme predicts how the motor currents will respond to each possible switch configuration of the power converter, then picks the one that makes the currents closest to their targets one or two steps ahead. A refined version, called multivector control, rapidly combines several switch patterns within a single control period so that the main torque-producing currents are correct while the parasitic currents in the extra subspaces ideally average to zero. Yet this elegant idea assumes perfect hardware. In reality, each converter leg inserts a brief pause between turning one transistor off and the other on to avoid a short circuit. During this dead time, the current is forced through diodes and the actual voltage seen by the motor briefly differs from what the controller expects.
How a tiny delay ruins a careful balancing act
The team first analyzes how these dead-time intervals disturb the carefully crafted multivector patterns. They show that, although the main torque-producing voltages remain close to their intended values, the unintended voltage pulses in the additional subspaces can be large because those paths have low electrical resistance. The effect becomes worse as engineers increase the control frequency to get faster response: each voltage step becomes shorter, but the dead-time duration stays fixed, so its share of the cycle grows. Through theoretical modeling and simulations, the authors demonstrate that switching between ideally benign voltage combinations can, under dead time, inject sizeable unwanted voltages and raise low-order harmonics in the currents.
Teaching the controller about the delay
Rather than adding extra switching actions or bolt-on harmonic filters, the authors propose folding a detailed model of dead time directly into the predictive control algorithm. Their dead-time influence estimation approach keeps using the same simple set of multivector patterns, but for each candidate action it computes what average voltage will actually appear in both the main and secondary subspaces once dead time and current direction are taken into account. The cost function that guides the controller is then evaluated using these corrected voltages, and it explicitly penalizes not only errors in the torque-producing currents but also unwanted currents in the secondary paths. This lets the controller choose the best compromise pattern at each instant, even at very high switching frequencies.
What experiments reveal about cleaner currents
The researchers implement their method on a laboratory setup using a custom six-phase motor driven by two standard three-phase power modules and a commercial digital signal processor. They compare three strategies: conventional single-vector predictive control, a basic multivector scheme that ignores dead time, and their improved dead-time aware version. Across a range of speeds and control frequencies up to 20 kilohertz, the proposed method consistently reduces standard measures of distortion in the motor currents, especially in the low-order harmonics linked to extra copper losses. Crucially, it does so without increasing the number of switching events, and it remains robust even when the motor parameters in the controller are deliberately mismatched from the real machine.
Bottom line for future electric drives
For readers, the main takeaway is that a tiny, unavoidable timing gap inside power converters can quietly erode the benefits of advanced control schemes just when they are pushed hardest. By explicitly modeling this dead time within a predictive, multivector controller, the authors restore the promised gains of multiphase motor drives: smoother currents, lower losses and better use of the available voltage, all without extra hardware or complex add-ons. As electric transport and high-efficiency industry continue to grow, such control-aware corrections will be key to squeezing maximum performance out of every watt.
Citation: Carrillo-Rios, J., Cordoba-Ramos, M., Lara-Lopez, R. et al. Multivector model predictive control for multiphase induction machines with dead-time knowledge. Sci Rep 16, 11686 (2026). https://doi.org/10.1038/s41598-026-46936-6
Keywords: multiphase motor drives, model predictive control, dead-time compensation, power electronics, current harmonics