Clear Sky Science · de
Anwendung der UAV‑Photogrammetrie zur Identifikation von Diskontinuitäten in Böschungen im Pulang‑Kupferbergwerk
Warum fliegende Roboter Bergwände beobachten
Hohe Felswände über Bergwerken und Gebirgsstraßen können ohne Vorwarnung versagen und Tonnen von Gestein talwärts stürzen lassen. Jede Rissbildung in diesen Klippen manuell zu überprüfen ist langsam und für Ingenieure riskant, die oft unmittelbar unter instabilem Fels arbeiten müssen. Diese Studie zeigt, wie mit Kameras ausgestattete Drohnen und intelligente Datenverarbeitung sicher die verborgenen Bruchmuster an einer steilen Böschung im chinesischen Pulang‑Kupferbergwerk „gelesen“ werden können, um vorherzusagen, wo das Gestein am ehesten versagt.
Eine gefährliche Böschung aus der Luft beobachten
Das Pulang‑Kupferbergwerk liegt in zerklüfteten, bewaldeten Bergen der Provinz Yunnan, wo tiefe Aushubarbeiten einen nahezu 100 Meter tiefen Einschnitt in den Hang geschaffen haben. Teile der Hauptböschung sind sehr steil und schwer zugänglich, und bereits während des Abbaus treten Felsstürze auf. Das Forschungsteam setzte eine große Drohne mit hochauflösender Kamera ein, um um den Abbruchtrichter zu fliegen und überlappende Bilder der Klippen aufzunehmen. Aus diesen Fotos bauten sie ein dreidimensionales Digitalmodell in Form einer „Punktwolke“ — Millionen winziger Punkte, die zusammen die Form der Felsoberfläche abbilden. Da dichte Vegetation große Bereiche des Felsens verdeckt, entfernte das Team sorgfältig Vegetationspunkte und wählte eine repräsentative Fläche aus, in der blanker Fels für eine detaillierte Analyse freiliegt. 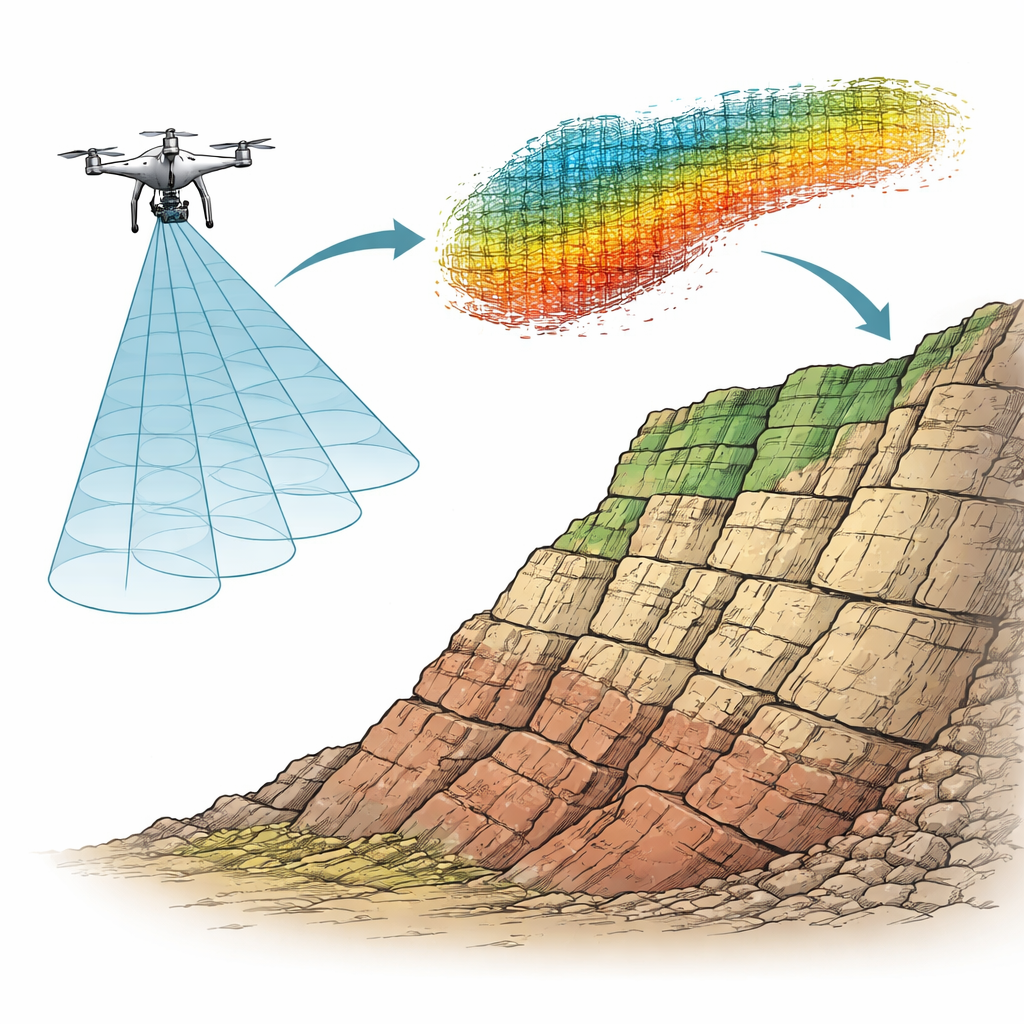
Von rohen Punkten zu aussagekräftigen Felsebenen
Aus einer rohen Punktwolke nützliche Informationen über Risse zu gewinnen, ist nicht trivial. Die Autoren kombinierten mehrere mathematische Werkzeuge, um dies effizient zu erreichen. Zuerst verwendeten sie eine Methode namens Hauptkomponentenanalyse, um für jeden Punkt zu bestimmen, wie die umliegende Felsoberfläche orientiert ist und wie stark sie gekrümmt ist. Punkte nahe scharfer Linien, an denen sich Brüche kreuzen, zeigen tendenziell eine hohe Krümmung, daher wurden viele dieser Punkte herausgefiltert, um die Daten zu vereinfachen. Anschließend wendeten sie ein dichtebasiertes Clustering‑Verfahren an, das benachbarte Punkte gruppiert, die auf derselben flachen Fläche liegen, und isolierte Punkte als Rauschen kennzeichnet. Dieser erste Schritt teilt die Wolke in viele kleine Stücke, die grob einzelnen Bruchflächen folgen.
Gruppierung von Bruchfamilien und Messung ihrer Ausdehnung
Im nächsten Schritt musste das Team diese vielen Fragmente in einige Haupt‑„Familien“ von Brüchen einordnen, die ähnliche Richtungen teilen. Dazu betrachteten sie ausschließlich die Orientierungen der kleinen Flächen und übergaben diese Informationen an ein weiteres Clustering‑Schema, das Gruppen mit gemeinsamen Trends erkennt. Durch die Anwendung dieses Schritts auf eine reduzierte Menge repräsentativer Punkte statt auf die gesamte Wolke hielten sie die Rechenzeit gering, fingen aber die Hauptmuster ein. Innerhalb jeder Familie führten sie schließlich eine zweite Runde des dichtebasierten Clusterings durch, um vollständige einzelne Brüche zu rekonstruieren. Für jeden bestimmten sie drei Schlüsselmessgrößen: seine Neigung und Richtung (Kompasskurs), die Länge seiner sichtbaren Spur an der Böschung und den Abstand zu benachbarten Brüchen. Abgleiche mit sorgfältiger manueller Anpassung in Fachsoftware zeigten, dass die automatischen Messungen der Bruchrichtungen innerhalb weniger Grad von Expertenabschätzungen lagen — ausreichend genau für ingenieurmäßige Anwendungen.
Prüfung, wie Brüche die Böschung schwächen
Die Forscher fragten anschließend, welche Bedeutung diese kartierten Brüche für die Standsicherheit der Böschung haben. Mit den gemessenen Richtungen, Längen und Abständen bauten sie ein statistisches Modell eines dreidimensionalen Brüchennetzes im Gesteinskörper. Dieses Netzwerk setzten sie in eine Computersimulation der realen Böschung ein, basierend auf einer an die Drohnen‑Punktwolke angepassten Oberfläche, und berechneten, wie sich das Gestein unter seinem Eigengewicht verhält. Im Vergleich eines Modells mit Brüchen zu einer ansonsten identischen ungebrochenen Böschung zeigte die gebrochene Variante größere, weniger gleichförmige Bewegungen und stärkere Spannungskonzentrationen rund um die Risse. Anders gesagt: Die Brüche zerteilen das Gestein in Blöcke, leiten Kräfte entlang bevorzugter Pfade und erzeugen Schwachzonen, an denen ein Versagen eher beginnt. 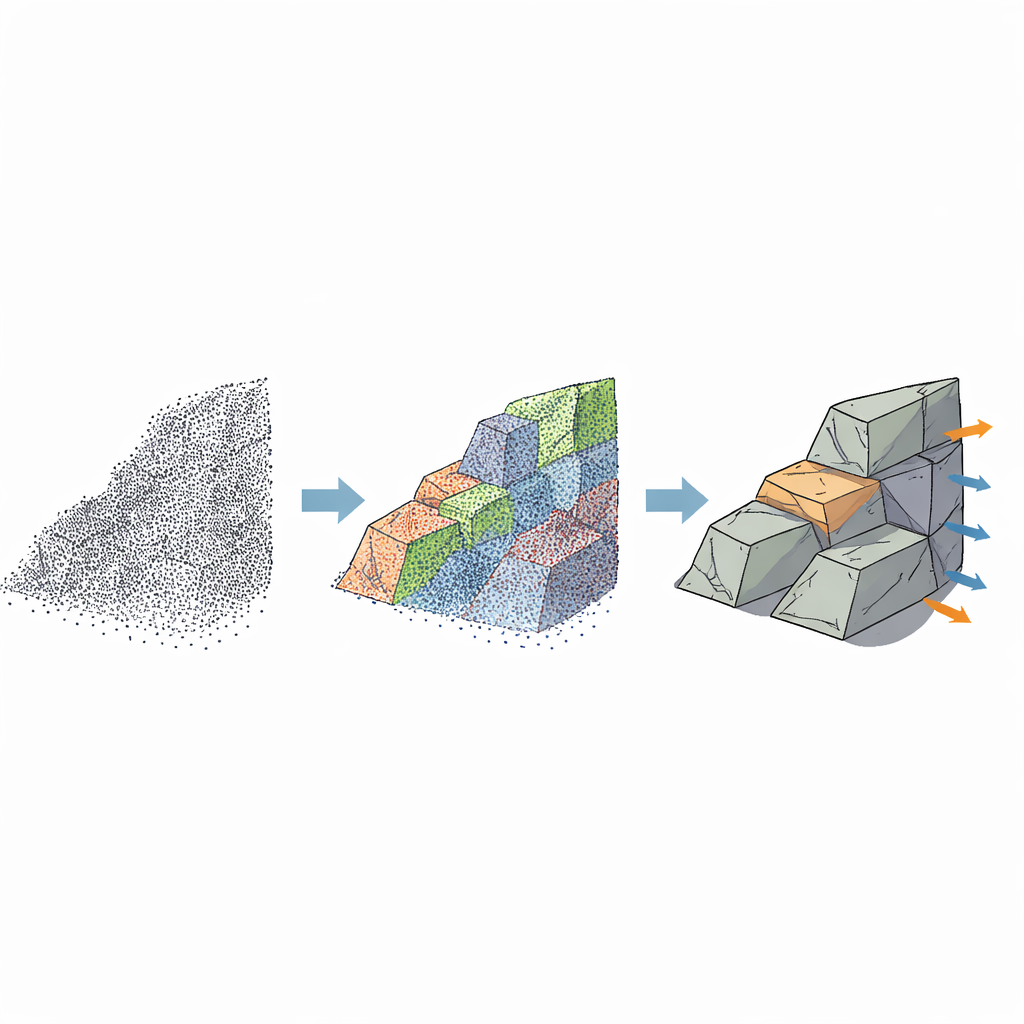
Schnellere digitale Augen für sicherere Böschungen
Für Nichtfachleute lautet die zentrale Botschaft: Drohnen plus intelligente Datenverarbeitung können gefährliche Klippen jetzt schnell und ohne Personen in Gefahr zu bringen vermessen und dennoch subtile Rissmuster sichtbar machen, die spätere Kollapsereignisse steuern. Der Pulang‑Fall zeigt, dass die neue Methode sehr große Datensätze deutlich schneller verarbeiten kann als ältere Ansätze und dabei Bruchmessungen liefert, die genau genug sind, um in Stabilitätssimulationen einfließen zu können. Obwohl dichte Vegetation und einige vereinfachende Annahmen noch einschränken, was sichtbar ist, weist dieser Arbeitsablauf auf routinemäßige, wiederholbare Gesundheitschecks für Felsböschungen über Bergwerken, Straßen und Staudämmen hin — mit fliegenden Robotern und Mathematik, um Probleme zu erkennen, bevor die Schwerkraft es tut.
Zitation: Wu, L., Wang, Y., Yang, J. et al. Application of UAV photogrammetry technology in identifying discontinuities in slopes in the Pulang copper mine. Sci Rep 16, 14101 (2026). https://doi.org/10.1038/s41598-026-43520-w
Schlüsselwörter: Drohnenkartierung, Standsicherheit von Felsböschungen, 3D‑Punktwolke, Bergwerksicherheit, Brucherkennung