Clear Sky Science · zh
使用 k-means++ 分层聚类与神经组合网络求解多仓封闭路径多旅行商问题
为众多司机设计更聪明的路线
从包裹货车到配送无人机和灾后救援车队,规划者常面临一道难题:多辆从不同地点出发的车辆如何分担拜访数百或数千个站点的工作,同时不浪费燃料或时间?本文提出了一种新的分而治之方法,结合了经典聚类技巧和现代神经网络,使计算机能在几秒钟而不是几分钟或几小时内规划出高效路线。
多仓多司机的挑战
研究聚焦于旅行商问题的一个更复杂版本:不再是单个旅行者,而是多个旅行者,每个旅行者都有自己的起点和终点。他们必须共同且各自只访问每个城市一次,同时尽量缩短总行程距离。这种设置模拟了协调卡车车队、机器人群或无人机在区域内分工的任务。由于城市和司机数量增加时可选路线组合数呈爆炸式增长,精确方法会变得过慢,传统的试错搜索方法也常常力不从心,或必须在解的质量和速度之间做出妥协。
经典搜索和简单划分的局限
多年来,工程师们依赖诸如遗传算法、蚁群算法和粒子群等“元启发式”方法。这些方法模拟自然过程来探索大量候选路线并逐步改进。它们灵活但有两个主要缺点:无法给出解的质量保证,而且在大规模地图上可能非常缓慢,尤其是每次新任务都得重新开始搜索时。一个常用的加速手段是先用 k-means 等工具将城市聚成若干区域,然后在每个簇内解决规模更小的问题。尽管这种先划分再求解的策略有帮助,但最终质量仍受限于底层搜索方法,要想得到更好的路径通常要付出更长的运行时间。
先教网络如何规划,再帮它扩展规模
近年出现了不同的思路:训练神经网络直接输出好路线。经过对大量示例城市布局的学习后,这类网络可以在一次前向传递中提出完整的巡回路线,就像语言模型生成一句话一样。这些神经解算器在中等规模的单司机问题上表现令人印象深刻,但在需要协调多名司机或城市数量远超训练规模时会遇到瓶颈。作者的关键举措是将这种神经解算器包裹在一个谨慎的两步流程中,将巨大的多司机任务重塑为许多较小且网络熟悉的子问题,从而让网络能够轻松处理。
两阶段方法如何运作
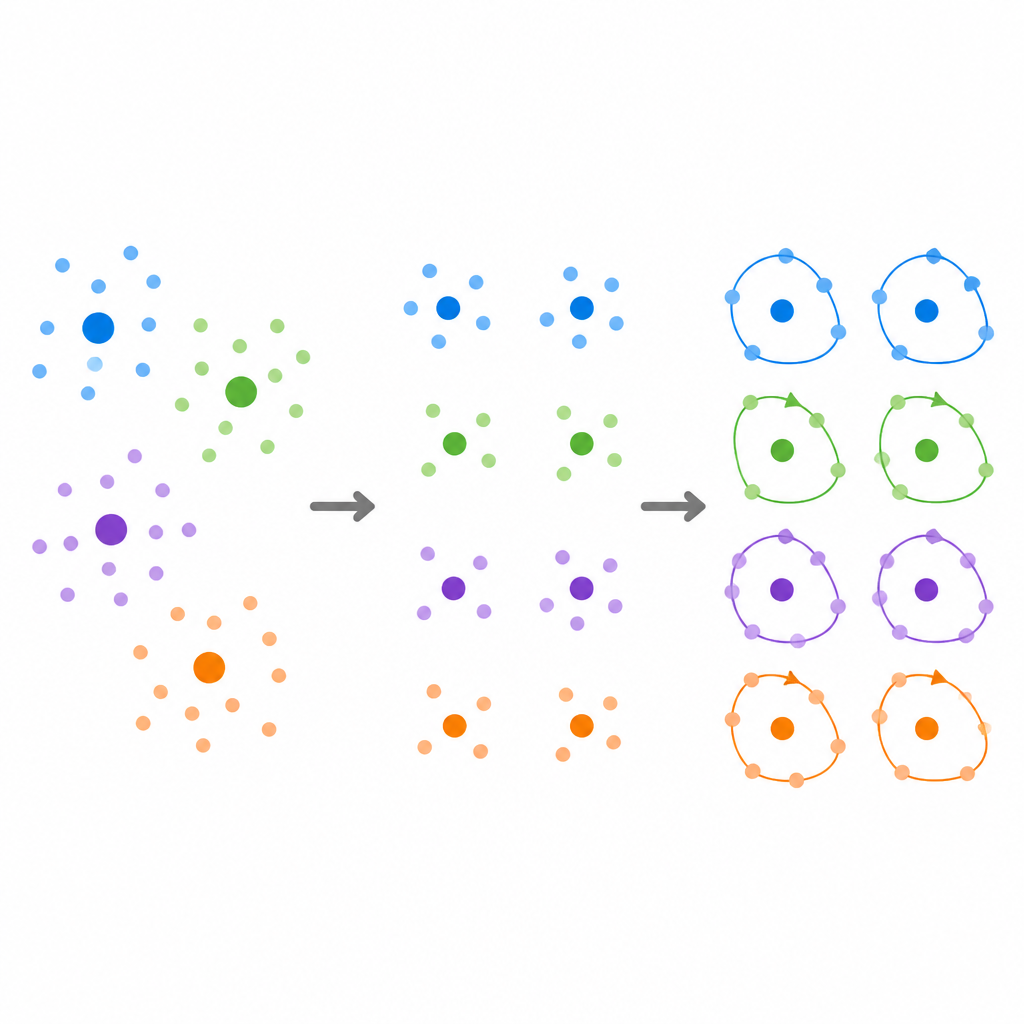
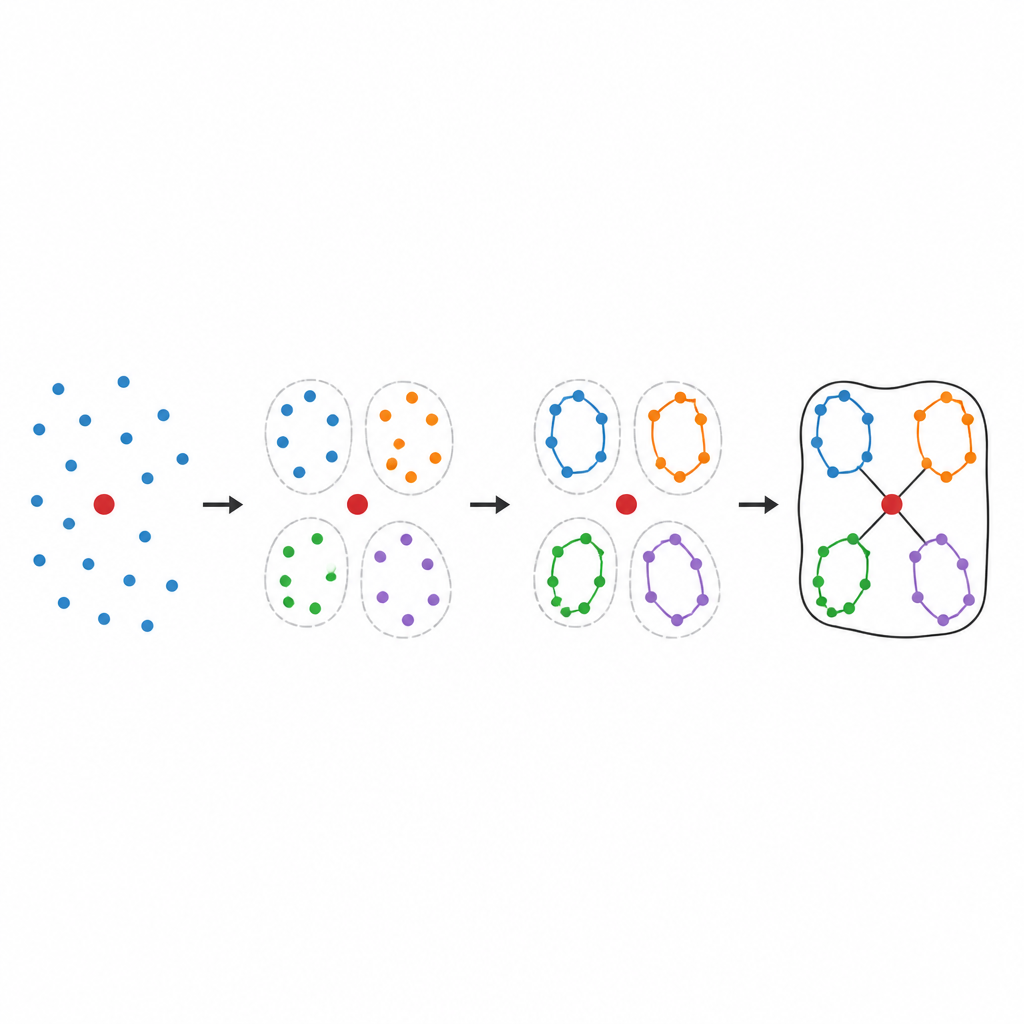
所提出的方法称为 KHC-NCN,首先使用改进版的 k-means 聚类将城市分配到不同的仓库和司机。如果某个区域包含的城市过多而超出神经解算器的可靠处理能力,该方法会自动将该区域进一步拆分为更小的片段,每片段的规模接近网络训练时看到的大小。然后将每个片段的坐标缩放到标准方形内,使其更类似训练数据。神经网络随后为每个小片段生成一条路线。最后,一个合并步骤将这些子路线缝合成每位司机的单一回路,采用简单的几何规则在增加最少额外距离的地方连接各片段。
在真实基准地图上的速度与质量
作者在一组广泛的标准地图上测试了他们的方法,这些地图来自路由研究中广泛使用的公开基准集。他们将方法与多种成熟的搜索技术、一流的手工设计解算器以及另一种神经方法进行了比较。在包含不同地图规模和司机数量的 44 个测试案例中,他们的方法在近四分之三的案例中找到更短的总路径,同时速度显著更快,常常快一个或多个数量级。随着城市数量攀升到数百或数千,他们的方法表现尤为稳健,而许多经典方法要么变慢、要么给出较差的路线。
对现实世界路径规划的意义
简而言之,该研究表明让快速的神经网络处理许多小且形状良好的子问题,往往优于在一个巨大问题上花费大量时间。通过以符合网络“舒适区”的方式聚类城市,然后巧妙地合并部分解,该方法既能给出较短的路径,又能迅速计算完成。对于物流、多机器人规划和应急响应等应用场景,这指向了一种实用路径,可以实现近实时的路线规划,从而比许多现有工具更好地利用车辆与能源。
引用: Zhao, CS., Wong, LP. & Fung, C. Solving multi-depot closed-path multiple traveling salesman problem using k-means++ hierarchical clustering and neural combinatorial networks. Sci Rep 16, 15631 (2026). https://doi.org/10.1038/s41598-026-45824-3
关键词: 车辆路径规划, 神经网络, 聚类, 优化, 物流