Clear Sky Science · zh
使用混合LQR与超扭滑模方法的抗扰动四旋翼控制
让小型飞行器保持稳定
从包裹投递到搜救任务,小型无人机被要求在混乱的真实环境中飞行——阵风、电池衰减、载荷变化、甚至电机故障。然而大多数无人机仍依赖于假设环境平静可预测的控制系统。本文提出了一种新方法,用于在故障发生时保持四旋翼训练平台的稳定与安全,旨在为未来在城市、农田和灾区作业的空中机器人提供更可靠的飞行能力。
为什么保持无人机平衡如此困难
四旋翼无人机像空中走钢丝的杂技演员:它们必须不断围绕偏航、俯仰和横滚三个主要角度进行平衡,而仅有四个旋转的推进器可用。从理论上讲,经典控制方法在条件与理论模型匹配并且扰动轻微时可以保持稳定。实际上,无人机会遇到风、重心转移、电机磨损和传感器噪声。更先进的方法如模型预测控制以及各种滑模和自适应控制能应对其中一些问题,但它们通常需要大量计算和复杂调参。作者寻求折中方案:设计一种对恶劣条件有鲁棒性、同时足够简单以在真实硬件上实现的控制器。
无人机的双层“控制大脑”
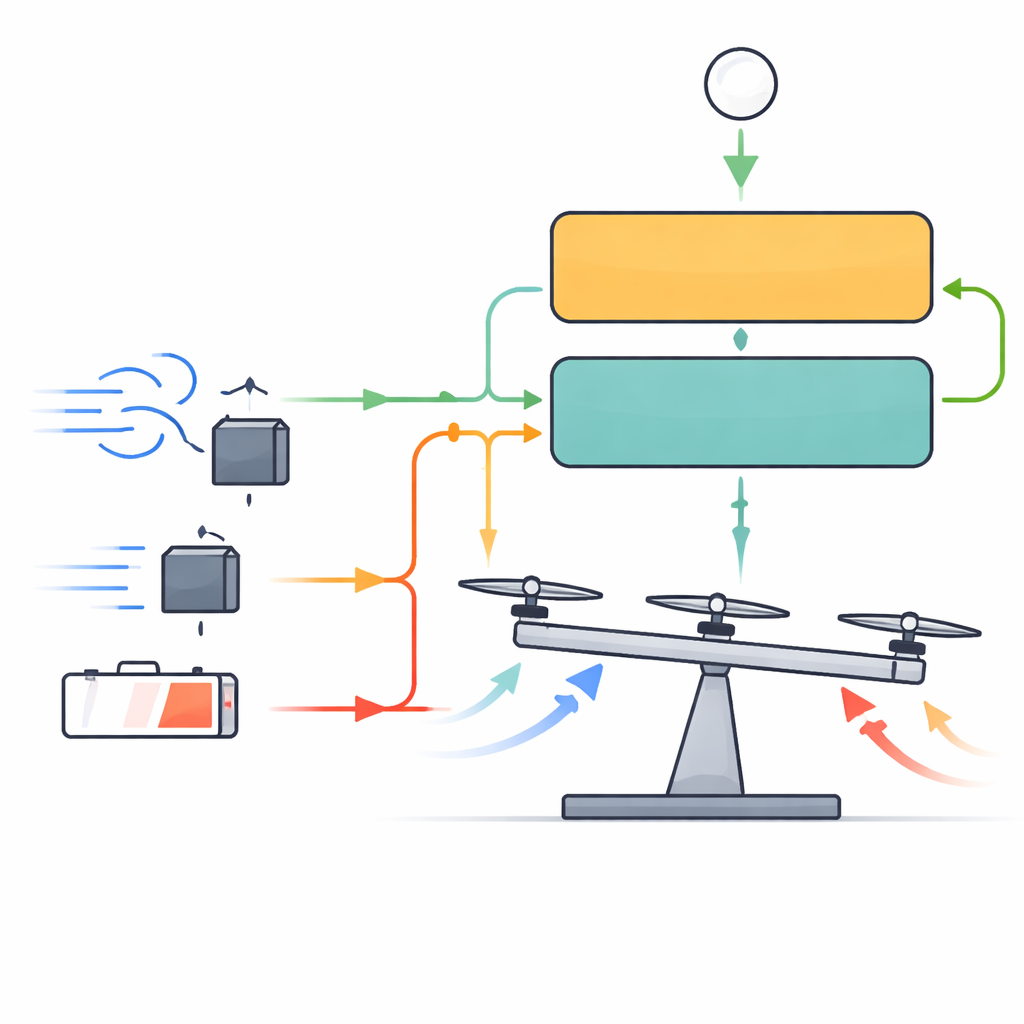
研究引入了一种协同工作的混合控制方案,由两层组成。内层使用一种广为人知的方法——线性二次调节器(LQR),当模型准确且扰动较小时,LQR 能很好地保持系统平滑并高效耗能。在其外层,研究人员包裹了一层更为坚韧的控制,基于称为超扭滑模控制的技术。外层不断监测系统与期望运动的偏差,并产生修正偏置——一种移动的目标,供内层跟踪。鲁棒层并不直接作用于电机,而是重塑传给内层控制器的参考信号,使无人机表现得像扰动已被抵消一样。
教会控制器应对意外
为使外层尽可能有效,作者使用一种有趣命名的元启发式优化方法“大爆炸–大坍缩”(Big Bang–Big Crunch)自动调优其关键参数。在此搜索过程中,许多候选参数集在仿真中被尝试,并根据它们随时间减少跟踪误差的能力进行评估,然后收缩到最佳区域,直到找到高效组合。完整的混合控制器在一个来自商业实验室的三自由度悬停系统上测试:一根装有四个推进器的杆可以绕枢轴在偏航、俯仰和横滚方向旋转。该装置在被安全固定到工作台的同时,重现了四旋翼的核心平衡挑战。
在虚拟天空中施加应力测试
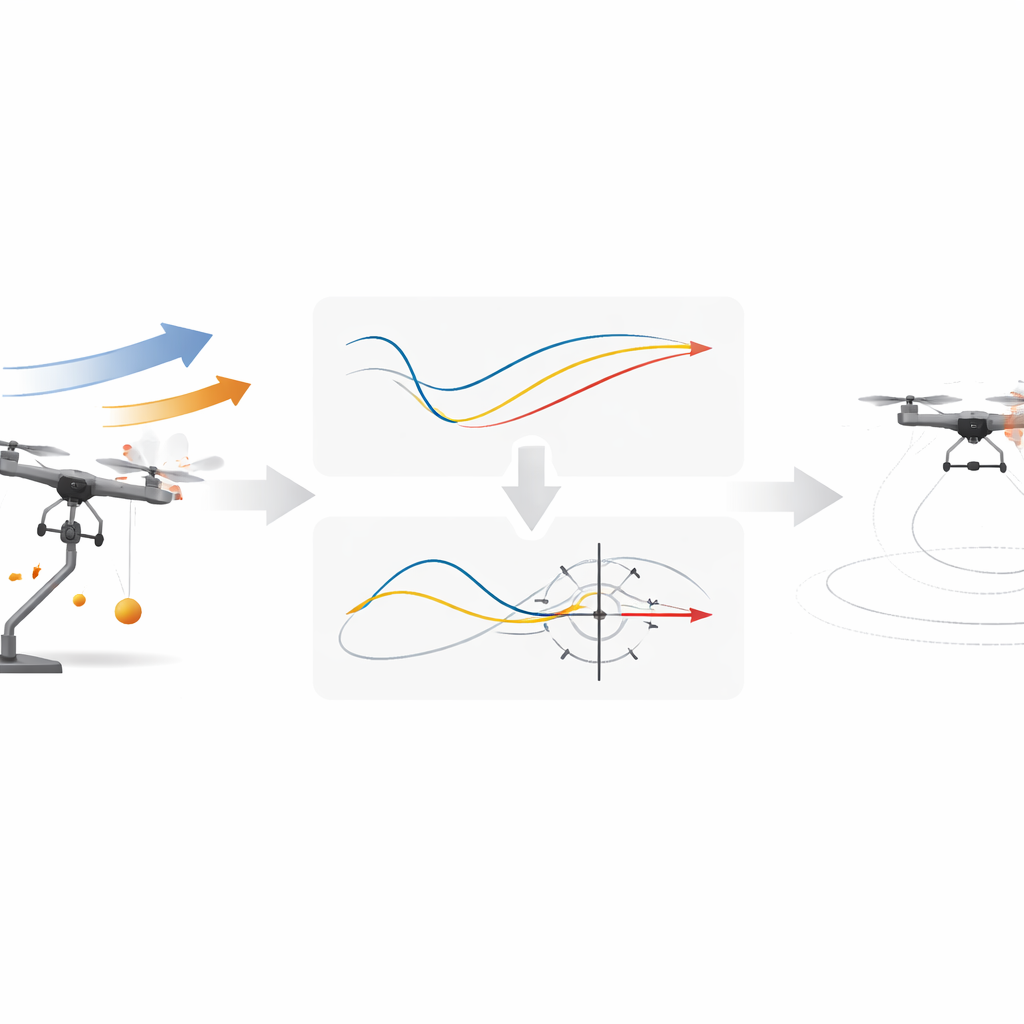
研究者在四个严格场景下比较了三种方法——经典LQR、模型预测控制和新提出的混合控制器。第一,在所有轴上加入恒定风力;第二,逐步削弱电机推力以模拟电池放电;第三,在短时间内完全关闭一个电机;第四,在飞行中段投下重载,瞬间改变系统质量和配重。在每种情况下,他们测量若干误差指标,捕捉偏差的幅度、持续时间以及系统收敛速度。他们还重建了旋翼端点的三维运动,以直观显示每种控制器能将运动限制在多紧的空间范围内。
结果说明了什么
在所有场景中,混合控制器不仅保持了平台的稳定性,而且与LQR和模型预测控制相比,将跟踪误差降低了数量级。虽然预测控制器在初期反应常更快,但当基础模型不再与现实相符时——例如投载荷后或推力特性变化时——它往往出现漂移或应对困难。相比之下,混合方案能摆脱这些不匹配:外层鲁棒控制抵消扰动和参数变化的影响,使内层控制器可以专注于其最擅长的平滑跟踪。重建的旋翼轨迹在视觉上证实了这一点:混合控制下的运动被限制在狭窄包络内,表明振荡更小且实际稳定性更好。
这对日常无人机意味着什么
简而言之,论文表明赋予无人机一个双层控制“脑”——一部分平滑高效、一部分坚固抗扰动——可以大幅提升其在环境不按常理出牌时保持直立和按路线飞行的能力。由于该方法相对简单且计算量低,适合实际机载电子设备,而不仅限于仿真。随着这项方法从实验台移植到完全自由飞行的无人机上,它或能帮助未来的空中机器人承载货物、度过突发故障,并在我们上空不可预测的空气中更安全地运行。
引用: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
关键词: 四旋翼控制, 容错飞行, 鲁棒无人机稳定化, 混合控制系统, 风与载荷扰动