Clear Sky Science · zh
用于机器人感知不规则表面毫米级物体的互补视觉定位与触觉映射方法
能够“看见”和“触摸”的机器人
在许多危险环境——从空间站到核事故现场——人类依赖机器人去操作小型开关、药片、螺钉和按钮。但普通机器人的“眼睛”在光线不足或物体非常小且表面凹凸不平时常常失效。本文提出了一种结合视觉与触觉的机器人感知系统,灵感来自人类先用眼睛观察物体然后用指尖触探的方式。

为什么单靠视觉不够
大多数现代机器人依赖相机和深度传感器来识别物体并决定如何移动。这些视觉工具在干净、光线充足的工厂环境中表现良好,但在场景昏暗、拥挤或部分被遮挡时会遇到困难。作者展示了即便是强大的相机系统也可能在低光或眩光条件下丢失对小物体的跟踪或错过细微的表面细节。在这种情况下,机器人可能大致知道物体的位置,但无法判断其是否具有对精确抓取或按压至关重要的细小凸起、凹陷或不规则边缘。
制造能感知微小细节的“手指”
为了解决这一问题,研究人员制造了一种柔软、类皮肤的触觉传感器,其行为更接近人类指尖。通过喷墨印刷,他们在可拉伸的橡胶状材料上沉积了柔性金属导线,形成了一个压力敏感像素网格。在金属层之间夹有一层使用普通砂纸制成的纹理薄膜,为传感器提供了细微的不规则结构以提升灵敏度。当传感器被按压到物体表面时,其电信号随压力变化,从而能够检测非常轻微的触碰——可达到一粒小米的级别——并在数千次按压循环后仍能保持性能。
将触觉转为形状映射
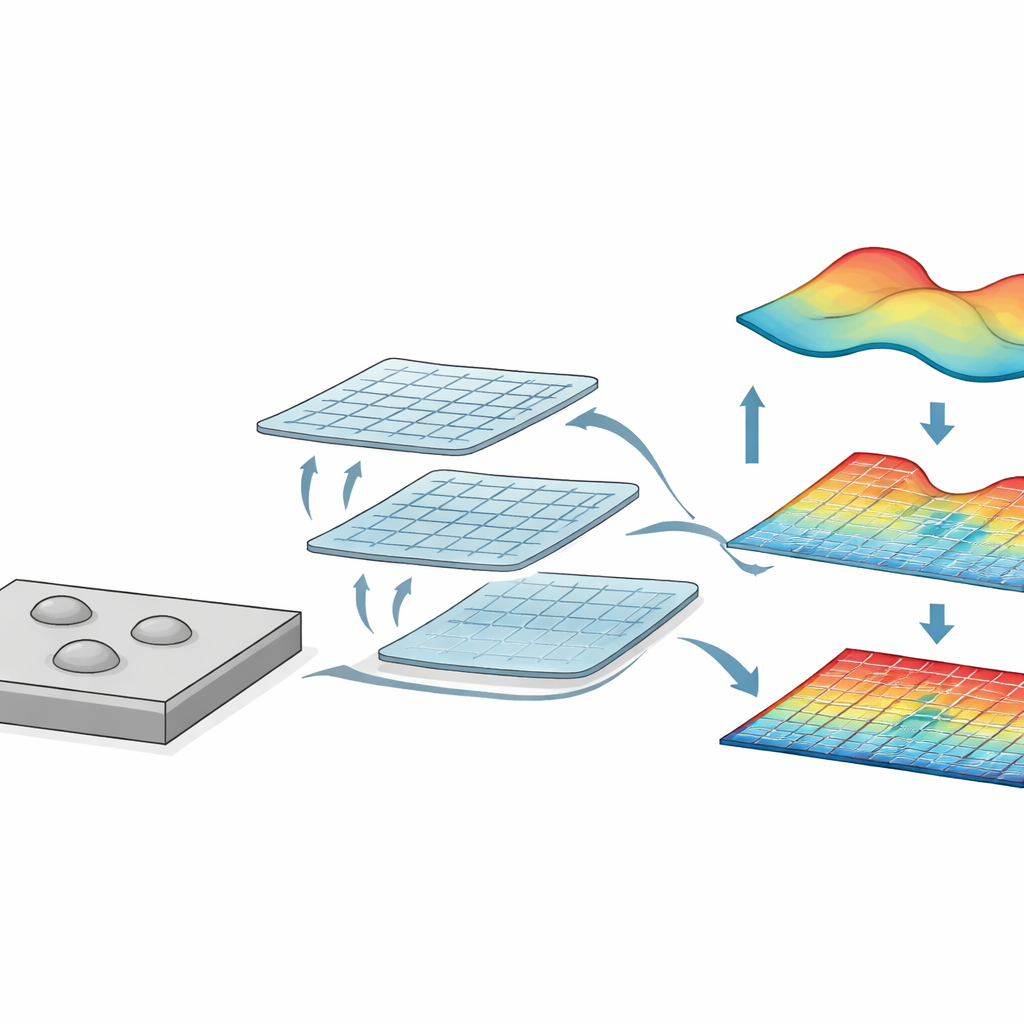
该柔性传感器随后扩展为一个小型阵列,能够捕捉一个区域内的压力分布,类似低分辨率图像。当团队将环形或其他复杂形状的物体按压到传感器上时,得到的压力图清晰地揭示了物体的轮廓和空洞区域,表明传感器可以通过触觉“看到”形状。计算机模拟证实,柔性材料会使应力局部集中,类似于人类皮肤,这有助于捕捉毫米级特征(如表面的微小凸起或突出物)在高度和纹理上的细微差异。
让视觉与触觉协同工作
完整系统使用RGB-深度相机来确定物体在空间中的位置,并使用柔性触觉垫来探查其表面。首先,相机从远处估计物体的位置和整体形状,类似于人们在伸手之前扫视桌面。当视觉信息变得不可靠——由于阴影、眩光或焦点问题——机器人就会将触觉传感器与物体接触。通过在表面不同部位扫描触觉垫并拼接压力数据,系统可以重建仅几毫米尺度的三维轮廓,例如药片泡罩中凸起的圆顶或控制面板上的小凸点。
对未来机器人的意义
通过融合基于相机的定位与基于触觉的精细映射,这项工作展示了机器人如何在无法完全依赖“眼睛”的情况下处理微小、不规则的物体。研究表明,一种简单、低成本的印刷传感器既可以作为视觉的补充,也可以在必要时替代视觉。这为未来能在变化环境中自适应、像人类那样结合视觉与触觉以执行精密任务的机器人奠定了基础,使其能在混乱、不确定或危险的环境中工作。
引用: Jang, J., Park, BS., Oh, K.T. et al. Complementary visual localization and tactile mapping approach for robotic perception of millimeter-sized objects with irregular surfaces. Microsyst Nanoeng 12, 91 (2026). https://doi.org/10.1038/s41378-026-01190-8
关键词: 类人机器人, 触觉传感, 多模态感知, 微操作, RGB-深度视觉