Clear Sky Science · tr
Hibrit LQR ve süper-bükülen kayma modlu yaklaşım kullanarak bozucu etkilere dayanıklı quadrotor kontrolü
Küçük Uçan Makineleri Dengede Tutmak
Paket teslimatından arama-kurtarmaya kadar küçük insansız hava araçları, rüzgârlı koşullar, azalan bataryalar, değişen yükler ve hatta motor arızaları gibi dağınık gerçek dünya koşullarında uçmaları için talep görüyor. Oysa çoğu drone hâlâ dünyanın sakin ve öngörülebilir olduğu varsayımına dayanan kontrol sistemlerine güveniyor. Bu makale, işler ters gittiğinde bir quadrotor tipi eğitim platformunu dengede ve güvenli tutmanın yeni bir yolunu sunuyor; hedef, şehirler, çiftlikler ve afet bölgelerinde çalışacak geleceğin hava robotları için daha güvenilir uçuşlar sağlamak.
Bir Drone’u Dengede Tutmak Neden Bu Kadar Zor?
Quadrotor drone’lar uçan cambazlara benzer: yalnızca dört dönen pervane kullanarak yaw, pitch ve roll olmak üzere üç ana açı etrafında sürekli dengede kalmak zorundadırlar. Teoride klasik kontrol yöntemleri, koşullar kağıt üzerindeki matematiğe uyduğunda bunları kararlı tutabilir. Pratikte ise dronelar rüzgâr, ağırlık değişimleri, motor aşınması ve sensör gürültüsü ile karşılaşır. Model öngörülü kontrol ve çeşitli kayma modlu ve uyarlamalı kontrol türleri gibi daha gelişmiş yaklaşımlar bu sorunların bazılarını ele alabilir, ancak genellikle yoğun hesaplama ve karmaşık ayar gerektirirler. Yazarlar bir orta yol aramış: kötü koşullara dayanıklı ama gerçek donanımda uygulanabilecek kadar basit bir kontrolör.
Drone İçin İki Katmanlı Bir “Beyin”
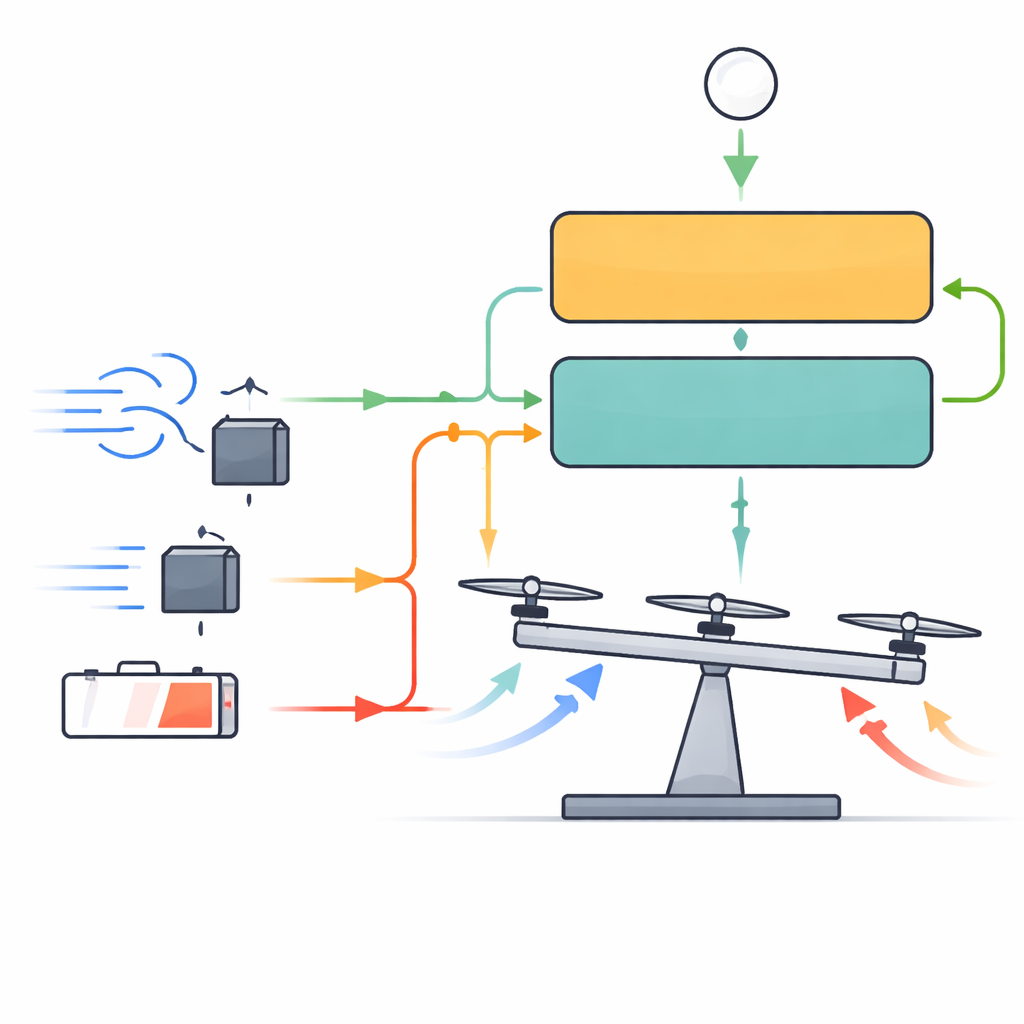
Çalışma, birlikte çalışan iki katmanlı hibrit bir kontrol şeması tanıtıyor. İç katman, model doğru ve bozucular hafif olduğunda sistemi düzgün ve enerji verimli tutmada çok iyi olan Doğrusal Kuadratik Regülatör (LQR) adlı iyi bilinen bir yöntemi kullanıyor. Bunun etrafına ise araştırmacılar süper-bükülen kayma modlu kontrol adı verilen daha sağlam bir katman sarıyor. Bu dış katman, sistemin istenen hareketten nasıl saptığını sürekli izliyor ve iç katmanın takip etmesi için hareketli bir hedef gibi düzeltici bir ofset üretiyor. Sağlam katman doğrudan motorlara müdahale etmek yerine, iç kontrolöre verilen referans sinyali yeniden şekillendiriyor, böylece drone sanki bozucu etkiler yokmuş gibi davranıyor.
Kontrolörü Beklenmeyene Hazırlamak
Dış katmanı olabildiğince etkili kılmak için yazarlar temel parametrelerini Big Bang–Big Crunch adını taşıyan meta-sezgisel bir optimizasyon yöntemiyle otomatik olarak ayarlıyor. Bu arama sürecinde birçok aday parametre kümesi simülasyonda deneniyor, takip hatasını zaman içinde ne kadar azalttıklarına göre değerlendirilip en iyi bölgeye doğru daraltılıyor ve verimli bir kombinasyon bulunana dek sürdürülüyor. Tam hibrit kontrolör, dört pervaneli bir çubuğun bir pivota bağlı olarak yaw, pitch ve roll eksenlerinde dönebildiği ticari bir laboratuvar düzeneğinden alınan üç serbestlik dereceli bir hover sistemi üzerinde test ediliyor. Bu düzenek, bir quadrotor’un özlü dengeleme zorluğunu yakalarken güvenli şekilde bir tezgâha sabitlenmiş kalıyor.
Sanal Gökyüzünde Dayanıklılık Testleri
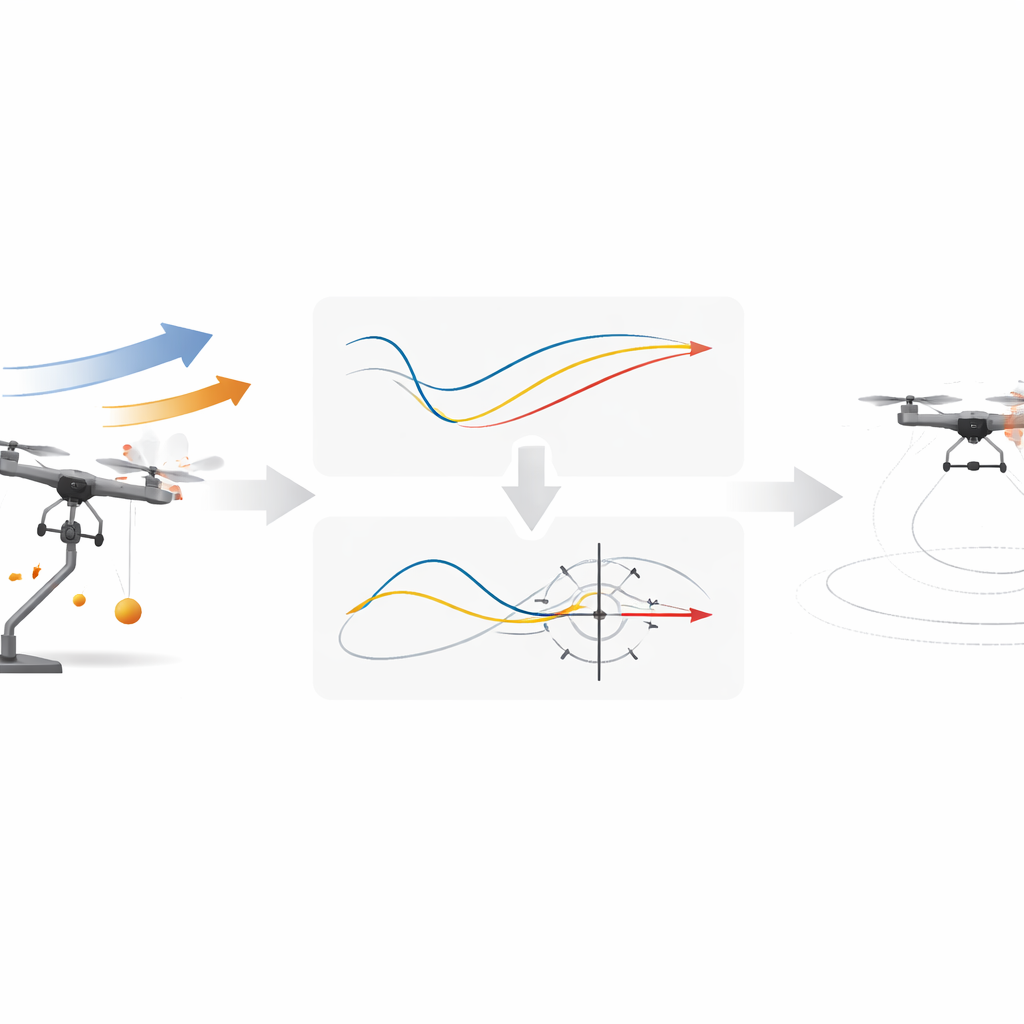
Araştırmacılar üç yaklaşımı—klasik LQR, model öngörülü kontrol ve yeni hibrit kontrolör—dört zorlayıcı senaryo boyunca karşılaştırıyor. Birincide tüm eksenler boyunca sabit rüzgâr kuvvetleri ekleniyor; ikincisinde bataryanın boşalmasını taklit etmek için motor itiş gücü kademeli olarak zayıflatılıyor; üçüncüde kısa bir süre için bir motor tamamen kapatılıyor; dördüncüde ise uçuş ortasında ağır bir yük bırakılarak sistemin kütlesi ve dengesinde ani değişiklikler yapılıyor. Her vaka için sapmanın büyüklüğünü, süresini ve sistemin ne kadar çabuk yeniden kararlı hâle geldiğini yakalayan çeşitli hata ölçekleri ölçülüyor. Ayrıca, her kontrolörün hareketi uzayda ne kadar sıkı tuttuğunu görmek için bir rotor ucunun üç boyutlu hareketi yeniden oluşturuluyor.
Sonuçlar Ne Gösteriyor?
Tüm senaryolarda hibrit kontrolör hem platformu kararlı tutuyor hem de takip hatalarını LQR ve model öngörülü kontrole kıyasla katlarca azaltıyor. Öngörülü kontrol başlangıçta daha hızlı tepki verebilse de, altındaki model gerçeklikle uyuşmaz hâle geldiğinde—örneğin bir yük bırakıldıktan sonra veya itiş özellikleri değiştiğinde—sürüklenme ya da zorlanma eğilimi gösteriyor. Hibrit şema ise bu uyumsuzlukları umursamıyor: dış sağlam katman bozucu etkileri ve parametre değişikliklerini iptal ediyor, iç katmanın en iyi yaptığı işi yapmasına izin veriyor. Yeniden oluşturulmuş rotor yolları bunu görsel olarak da doğruluyor: hibrit kontrolör altındaki hareket sıkı bir zarf içinde kalıyor, bu da daha küçük salınımlar ve daha iyi pratik stabilite anlamına geliyor.
Günlük Drone’lar İçin Anlamı
Basitçe ifade etmek gerekirse, makale bir dron’a iki katmanlı bir kontrol “beyni”—biri pürüzsüz ve verimli, diğeri dayanıklı ve bozuculara karşı acımasız—vermenin, dünya beklenmedik davransa bile dik ve rotada kalma yeteneğini büyük ölçüde artırabileceğini gösteriyor. Yaklaşım nispeten basit ve hesaplama açısından hafif olduğundan sadece simülasyonlar için değil, gerçek yerleşik elektronikler için de uygundur. Bu yöntem laboratuvar düzeneklerinden tam serbest uçan dronelara geçirilirken, gelecekteki hava robotlarının yük taşımasına, ani arızalardan kurtulmasına ve üzerimizdeki öngörülemez havada daha güvenli çalışmasına yardımcı olabilir.
Atıf: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Anahtar kelimeler: quadrotor kontrolü, arızaya dayanıklı uçuş, sağlam drone stabilizasyonu, hibrit kontrol sistemleri, rüzgâr ve yük bozucuları