Clear Sky Science · tr
Düzensiz yüzeyli milimetre büyüklüğündeki nesnelerin robotik algılanması için tamamlayıcı görsel yerelleştirme ve dokunsal haritalama yaklaşımı
Görebilen ve Hisseden Robotlar
Uzay istasyonlarından nükleer kaza bölgelerine kadar birçok tehlikeli ortamda insanlar, küçük anahtarlar, haplar, vidalar ve düğmelerle başa çıkmak için robotlara güveniyor. Ancak sıradan robot “gözleri” loş ışıkta veya nesneler çok küçük ve pürüzlü olduğunda sık sık başarısız oluyor. Bu makale, önce bir nesneye bakan sonra parmak uçlarıyla keşfeden insan davranışından esinlenen, görmeyi ve dokunmayı birleştiren bir robot algılama sistemi sunuyor.

Neden Yalnızca Görme Yeterli Değil
Çoğu modern robot, nesneleri tanımak ve nasıl hareket edeceklerine karar vermek için kameralara ve derinlik sensörlerine dayanır. Bu görsel araçlar temiz, iyi aydınlatılmış fabrikalarda iyi çalışır, ancak sahne karanlık, kalabalık veya kısmen gizliyse zorlanır. Yazarlar, güçlü kamera sistemlerinin bile küçük nesnelerin takibini kaybedebileceğini veya özellikle düşük ışık ya da parlama altında ince yüzey ayrıntılarını kaçırabileceğini gösteriyor. Böyle durumlarda robot bir şeyin kabaca nerede olduğunu bilebilir, ancak tutma veya hassas basma için kritik olan küçük tümsekler, oyuklar veya düzensiz kenarlar olup olmadığını bilemeyebilir.
Minik Ayrıntıları Hissedebilen Bir Parmak İnşa Etmek
Bu sorunu çözmek için araştırmacılar insan parmak ucu gibi davranan yumuşak, deri benzeri bir dokunma sensörü geliştirdi. Mürekkep püskürtmeli baskı kullanarak esnek metal izleri esneyebilen kauçuk benzeri bir malzeme üzerine yatırdılar ve basınca duyarlı piksellerden oluşan bir ızgara oluşturdular. Metal katmanların arasında sıradan zımpara kağıdı kullanılarak yapılan dokulu bir film bulunuyor; bu, sensöre ince, düzensiz bir yapı vererek hassasiyetini artırıyor. Sensör bir nesneye bastırıldığında elektriksel sinyali basınca göre değişiyor; bu sayede çok hafif dokunuşları—örneğin küçük bir pirinç tanesi seviyesini—algılayabiliyor ve binlerce basma-bırakma döngüsünde performansını kaybetmeden çalışabiliyor.
Dokunmayı Şekil Haritalarına Dönüştürmek
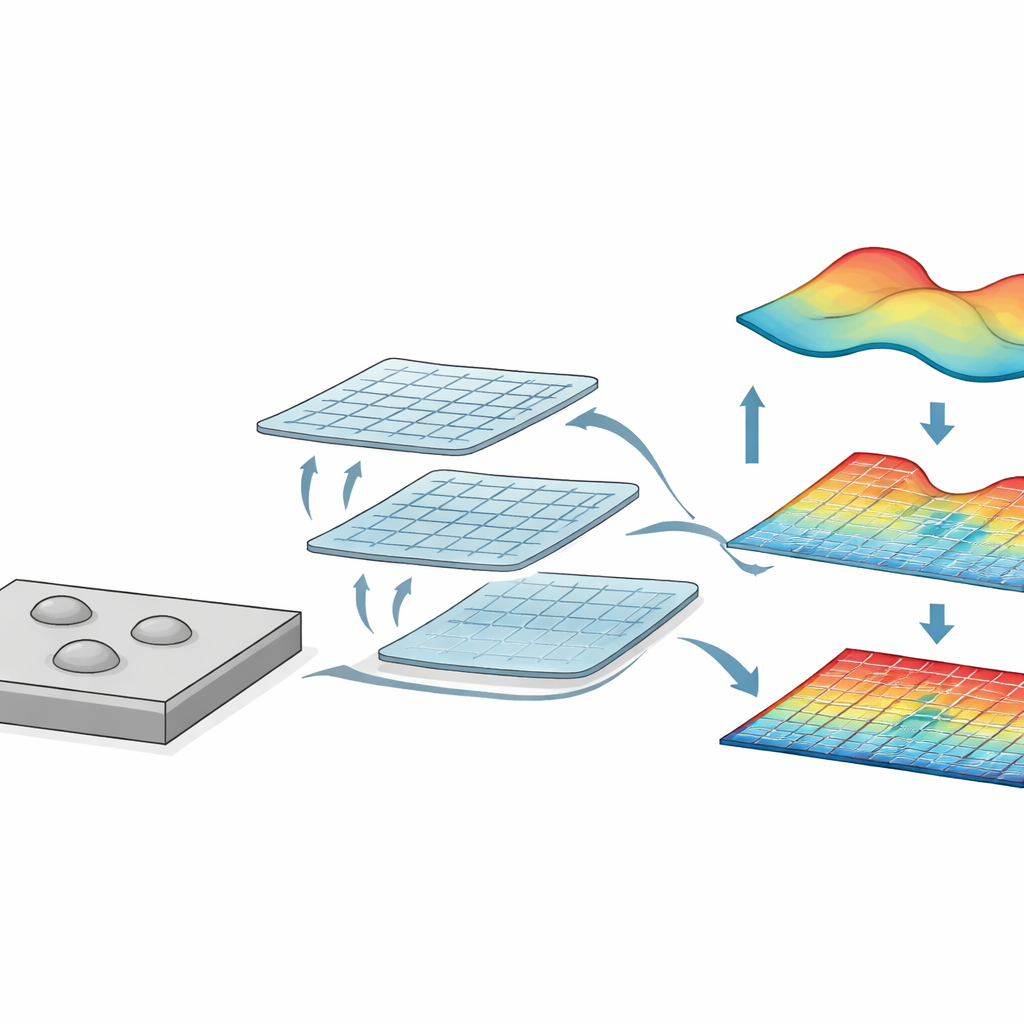
Yumuşak sensör daha sonra bir alan üzerindeki basınç desenlerini, düşük çözünürlüklü bir görüntüye benzer şekilde yakalayabilen küçük bir diziye genişletildi. Ekip halka biçimli veya diğer karmaşık nesneleri sensöre bastırdığında ortaya çıkan basınç haritaları, konturlarını ve iç boşluklarını net şekilde açığa çıkardı; bu, sensörün dokunarak şekilleri “görebildiğini” gösteriyor. Bilgisayar simülasyonları, yumuşak malzemenin gerilimi yerel olarak yoğunlaştırdığını, tıpkı insan derisi gibi, bunun da yüzeydeki milimetre ölçeğindeki yükseklik ve doku farklılıklarını—küçük tümsekler veya çıkıntılar gibi—algılamasına yardımcı olduğunu doğruladı.
Görme ve Dokunmanın Birlikte Çalışmasına İzin Vermek
Tam sistem, bir RGB-D kamera kullanarak nesnenin uzaydaki konumunu buluyor ve yüzeyini keşfetmek için yumuşak bir dokunma pedi kullanıyor. Önce kamera, bir kişinin masaya hızlıca bakıp sonra uzanmasına benzer şekilde uzaktan nesnenin konumunu ve genel şeklini tahmin ediyor. Görsel bilgiler gölge, parlama veya odak sorunları nedeniyle güvenilmez hale geldiğinde robot dokunsal sensörünü nesneyle temasa getiriyor. Pedi yüzeyin farklı kısımlarında tarayarak ve basınç verilerini birleştirerek, sistem bir blister içindeki hapların kabarık kubbeleri veya kumanda panelindeki küçük tümsekler gibi yalnızca birkaç milimetre çapındaki özelliklerin üç boyutlu profillerini yeniden oluşturuyor.
Geleceğin Robotları İçin Anlamı
Kamera tabanlı yerelleştirmeyi ayrıntılı dokunma tabanlı haritalama ile birleştirerek bu çalışma, robotların “gözlerine” tamamen güvenemedikleri durumlarda bile küçük, düzensiz nesnelerle nasıl başa çıkabileceğini gösteriyor. Çalışma, basit, düşük maliyetli bir baskılı sensörün hem görmeyi destekleyebileceğini hem de gerektiğinde görmenin yerine geçebileceğini ortaya koyuyor. Bu, değişen koşullara uyum sağlayan, insanlarda olduğu gibi hassas görevleri dağınık, öngörülmez veya tehlikeli ortamlarda yerine getirmek için görme ve dokunmayı birleştiren geleceğin robotları için temel oluşturuyor.
Atıf: Jang, J., Park, BS., Oh, K.T. et al. Complementary visual localization and tactile mapping approach for robotic perception of millimeter-sized objects with irregular surfaces. Microsyst Nanoeng 12, 91 (2026). https://doi.org/10.1038/s41378-026-01190-8
Anahtar kelimeler: insansı robotlar, dokunsal algılama, çok modlu algı, mikromanipülasyon, RGB-derinlik görme