Clear Sky Science · sv
Störningstolerant quadrotorkontroll med en hybrid LQR- och super-twisting sliding mode-metod
Hålla små flygande maskiner stadiga
Från paketleverans till räddningsinsatser ställs små drönare inför röriga verkliga förhållanden—byiga vindar, sviktande batterier, varierande last, till och med motorfel. Ändå förlitar sig de flesta drönare fortfarande på styrsystem som antar att världen är lugn och förutsägbar. Denna artikel presenterar ett nytt sätt att hålla en quadrotor-liknande träningsplattform stabil och säker när saker och ting går fel, med sikte på mer pålitlig flygning för framtida luftrobotar över städer, jordbruk och katastrofområden.
Varför det är så svårt att balansera en drönare
Quadrotordrönare är som flygande lindansare: de måste kontinuerligt balansera kring tre huvudsakliga vinklar—yaw, pitch och roll—med endast fyra snurrande propellrar. I teorin kan klassiska styrmetoder hålla dem stabila när förhållandena stämmer med matematikens antaganden. I praktiken möter drönare vind, viktförskjutningar, motorslitage och sensornycker. Mer avancerade metoder som model predictive control och olika varianter av sliding mode- och adaptiv styrning kan hantera en del av dessa problem, men de kräver ofta tung beräkning och fininställning. Författarna ville hitta en mellanväg: en regulator som är robust mot svåra förhållanden men ändå enkel nog att implementera på verklig hårdvara.
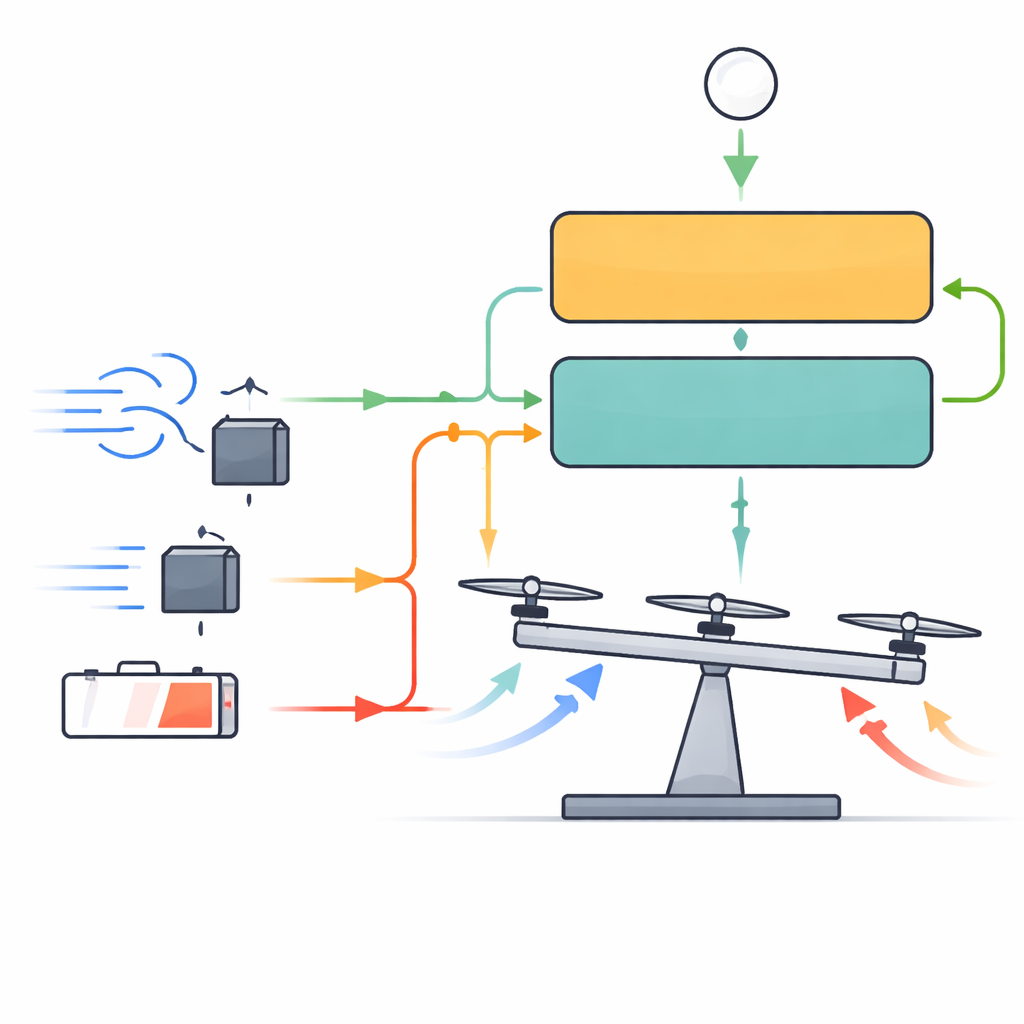
En tvålagers "hjärna" för drönaren
Studien introducerar ett hybridstyrschema med två lager som samarbetar. Det inre lagret använder en välkänd metod kallad Linear Quadratic Regulator, som är mycket bra på att hålla systemet mjukt och energieffektivt när modellen är korrekt och störningarna är små. Runt detta bygger forskarna ett andra, mer robust lager baserat på en teknik som kallas super-twisting sliding mode-kontroll. Detta yttre lager övervakar kontinuerligt hur systemet avviker från önskad rörelse och genererar en korrigerande förskjutning—en slags rörligt mål—som det inre lagret sedan följer. Istället för att direkt rycka i motorerna omformar det robusta lagret referenssignalen som matas till den inre regulatorn, så att drönaren beter sig som om störningarna inte fanns.
Att lära regulatorn hantera det oväntade
För att göra det yttre lagret så effektivt som möjligt ställer författarna automatiskt in dess nyckelparametrar med en metaheuristisk optimeringsmetod underhållande benämnd Big Bang–Big Crunch. I denna sökprocess prövas många kandidatparameteruppsättningar i simulering, betygsätts efter hur väl de minskar spårningsfelet över tid, och krymps sedan mot den bästa regionen tills en effektiv kombination hittas. Den kompletta hybridregulatorn testas på ett tregradigt hover-system från en kommersiell laboratorieuppställning, där en balk med fyra rotorer kan rotera i yaw, pitch och roll kring en pivot. Denna uppställning fångar det väsentliga balansproblemet hos en quadrotor samtidigt som den förblir säkert fastskruvad vid en bänk.
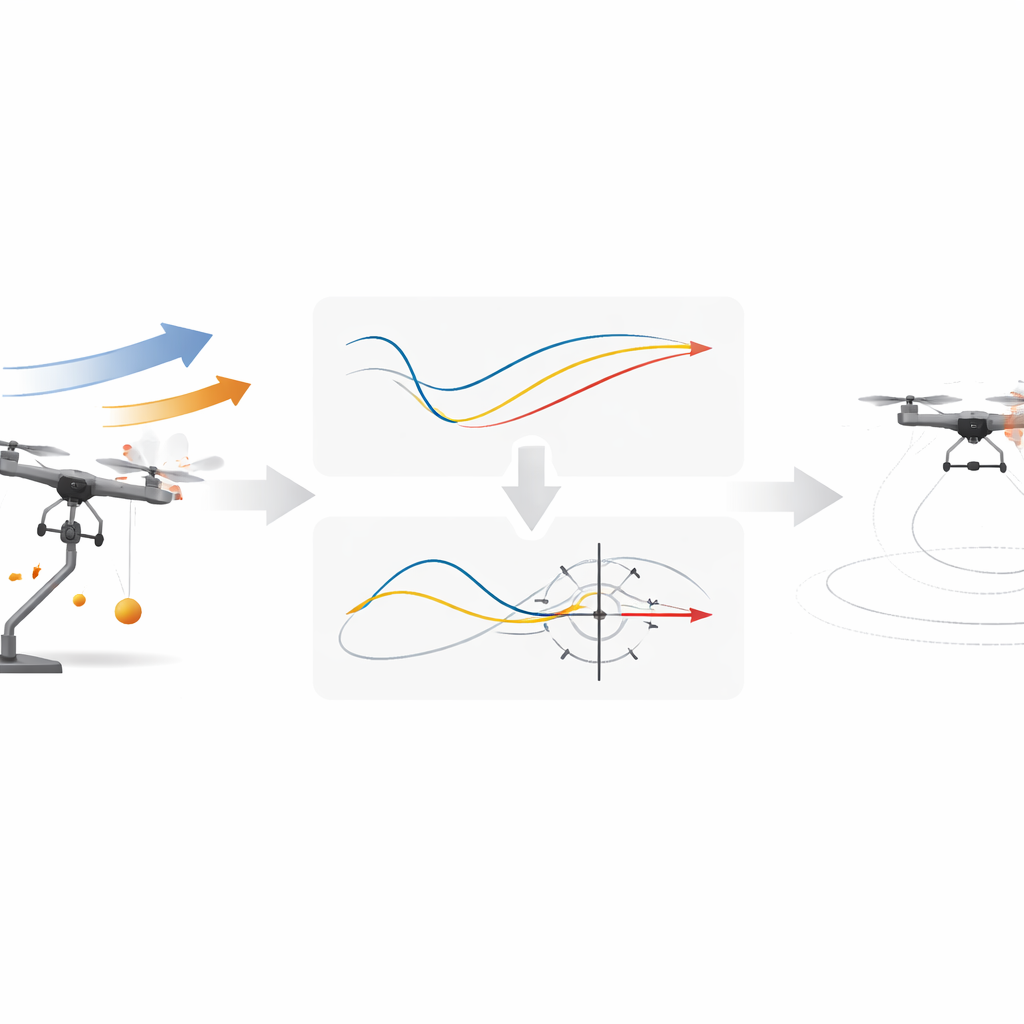
Stresstester i virtuella skyar
Forskarna jämför tre angreppssätt—klassisk LQR, model predictive control och den nya hybrida regulatorn—över fyra krävande scenarier. Först lägger de till stadiga vindkrafter längs alla axlar; därefter försvagar de gradvis motordriften för att efterlikna ett urladdande batteri; tredje, de stänger helt av en motor under ett kort intervall; och fjärde, de släpper en tung last mitt i flygningen vilket plötsligt ändrar systemets massa och balans. För varje fall mäter de flera felpoäng som fångar hur stora avvikelserna är, hur länge de varar och hur snabbt systemet återhämtar sig. De rekonstruerar också den tredimensionella rörelsen hos ett rotortips för att visuellt visa hur väl varje regulator kan begränsa rörelsen i rummet.
Vad resultaten visar
Över alla scenarier håller den hybrida regulatorn inte bara plattformen stabil utan minskar också spårningsfelen med flera storleksordningar jämfört med både LQR och model predictive control. Medan den prediktiva regulatorn ofta reagerar snabbare initialt tenderar den att driva iväg eller få problem när den underliggande modellen inte längre matchar verkligheten—till exempel efter en lastnedsläppning eller när drivkrafterna förändras. Den hybrida schematageren, däremot, skakar av sig dessa mismatch: det yttre robusta lagret tar ut effekten av störningar och parameterförskjutningar, vilket låter det inre lagret göra det det gör bäst. De rekonstruerade rotorspåren bekräftar detta visuellt: rörelsen under den hybrida regulatorn håller sig inom ett tätt hölje, vilket indikerar mindre svängningar och bättre praktisk stabilitet.
Vad detta betyder för vardagliga drönare
Enkelt uttryckt visar artikeln att genom att ge en drönare en tvålagers styr"hjärna"—en del mjuk och effektiv, en del tuff och störningshungrig—kan dess förmåga att hålla sig upprätt och på kurs när världen inte beter sig som väntat förbättras avsevärt. Eftersom tillvägagångssättet är relativt enkelt och beräkningsmässigt lätt lämpar det sig väl för verklig ombordelektronik, inte bara simuleringar. När denna metod flyttas från labbuppställningen till fritt flygande drönare kan den hjälpa framtida luftrobotar att bära last, överleva plötsliga fel och operera säkrare i den oförutsägbara luften ovanför oss.
Citering: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Nyckelord: quadrotorkontroll, felsäker flygning, robust dronestabilisering, hybrida styrsystem, vind- och laststörningar