Clear Sky Science · sv
Undersökning av stabilitet hos allmän rulldämpning av ett fartyg via en icke-perturbativ metod
Varför fartygsrullning berör alla
När ett fartyg rullar från sida till sida i hårt sjöväder kan rörelsen vara högst obekväm och i värsta fall farlig, med förlorad last, skador eller till och med kapsejsning som följd. Den här artikeln undersöker hur och när rullningen förblir kontrollerad, genom att använda en ny matematisk metod som beskriver fartygets rörelse mer exakt. Arbetet syftar till att ge konstruktörer och operatörer bättre verktyg för att förutse osäkra tillstånd och förbättra de anordningar som håller fartyg upprätta och deras last — och passagerare — säkra.
Hur ett fartyg beter sig när det rullar
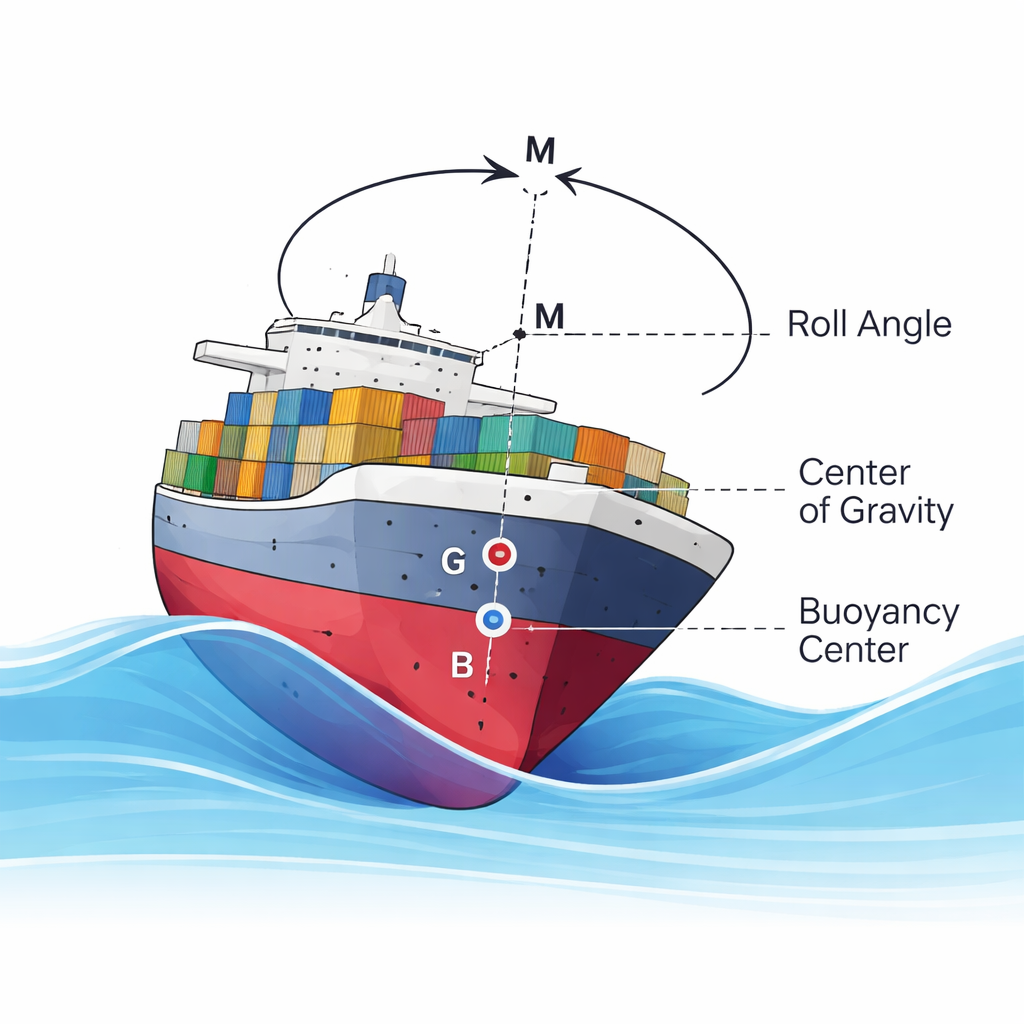
Rullning är fartygens gungande från sida till sida kring långskeppaxeln. Även i lugnt väder påverkas fartyg ständigt av vågor, och deras respons beror på form, massfördelning och hur vatten strömmar runt skrovet. Författarna fokuserar på en förenklad men realistisk beskrivning med en huvudrörelse: rullningsvinkeln. I denna bild uppstår fartygsbeteendet från fyra beståndsdelar: tröghet (tendensen att fortsätta röra sig), återställande krafter (flytkraft som försöker föra fartyget tillbaka upprätt), dämpning (energiförlust till vågor och friktion) och det yttre sjödrivet. Till skillnad från enkla läroboksmodeller som antar små rörelser och svaga krafter, upplever verkliga fartyg starka, icke-linjära effekter som kan leda till plötsliga hopp i rullvinkel, resonanser och till och med kaotiskt, oförutsägbart beteende.
Ett nytt sätt att tämja ett rörigt problem
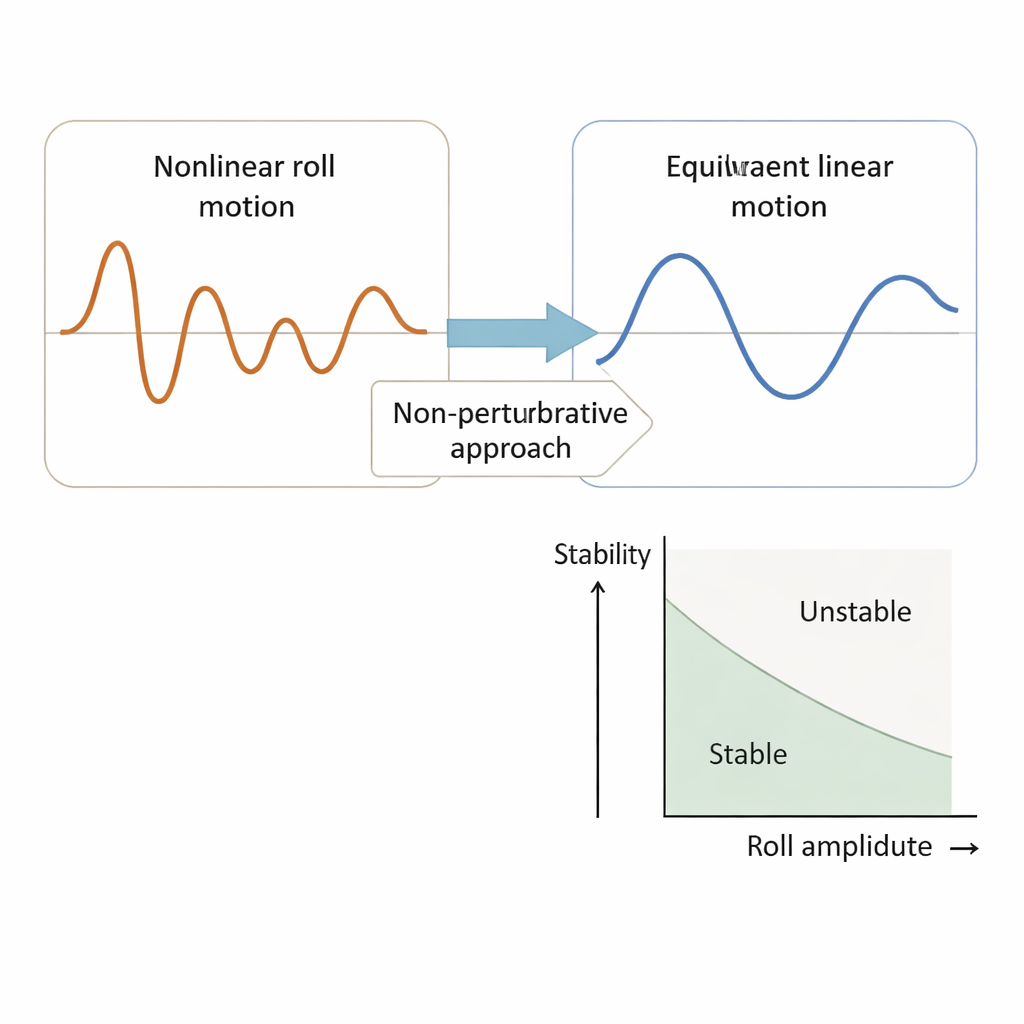
De flesta traditionella angreppssätt hanterar dessa icke-linjära effekter med perturbationstekniker, som bygger på att utveckla komplicerade ekvationer i serier och behålla endast de första termerna. Det kan fungera när rörelserna är mycket små men fallerar snabbt när sjön blir hårdare. Författarna antar en annan strategi kallad icke-perturbativ metod (NPA). Istället för att direkt lösa den svåra icke-linjära ekvationen konstruerar de skickligt en ekvivalent linjär ekvation vars beteende följer det verkliga systemet nära över varje rörelsecykel. Detta görs genom att genomsnittligt beräkna hur energi lagras och förbrukas över tiden, vilket leder till ”effektiva” dämpnings- och styvhetsvärden som inbegriper påverkan från alla icke-linjära termer. Numeriska simuleringar visar att denna ekvivalenta linjära modell återskapar den ursprungliga icke-linjära fartygsrörelsen med anmärkningsvärd noggrannhet, samtidigt som den är mycket enklare att analysera.
Undersöka stabilitet, resonans och kaosets gräns
Med den förenklade ekvivalenta modellen i hand utforskar författarna när fartygsrullningen förblir begränsad och när den blir riskfylld. De studerar hur nyckelparametrar — såsom naturlig rullningsfrekvens, olika typer av dämpning och högreordnade återställande krafter — formar regioner av stabilt respektive instabilt beteende. Ökad linjär och icke-linjär dämpning utvidgar i allmänhet det säkra området, eftersom mer energi avleds från rullningen. Omvänt kan förstärkning av vissa återställande termer eller förskjutning av den naturliga frekvensen krympa den stabila regionen och främja stora, plötsliga rulningar, särskilt när vågdrivningen nästan matchar fartygets egna rytm. Med hjälp av en välkänd teknik kallad metoden med multipla tidsskalor härleder teamet approximativa formler för rullamplituden nära resonans och studerar hur små förändringar i drivfrekvens eller styrka kan utlösa stora svar.
Från mjuka rörelser till kaos i hårt sjöväder
Studien går bortom stationära svängningar för att kartlägga hur systemet övergår från regelbunden till kaotisk rörelse när vågdrivningen ökar. Genom att beräkna bifurkationsdiagram, fasporträtt och Poincaré-kartor — standardverktyg inom icke-linjär dynamik — visar författarna att rullningen kan passera genom en sekvens av periodfördubblingssteg innan den blir helt kaotisk. Vid låg drivning etablerar sig fartyget i ett regelbundet, upprepningsbart mönster med en dominerande rullamplitud. När drivamplituden ökar börjar rörelsen först upprepa sig varannan eller var fjärde cykel och blir sedan oregelbunden och mycket känslig för begynnelsevillkor. Att identifiera dessa trösklar hjälper till att definiera driftintervall där fartyg bör undvika vissa fart–kurskombinationer eller sjöförhållanden för att förhindra farlig förstärkning av rullningen.
Vad detta betyder för säkrare fartyg
För en icke-specialist är huvudbudskapet att fartygsrullning inte bara är ett enkelt gungande fram och tillbaka; det är en komplex samverkan mellan vågdrivning, skrovform och energiförluster. Den icke-perturbativa metoden som utvecklats här erbjuder en praktisk genväg: den ersätter ett svårt icke-linjärt problem med ett noggrant justerat linjärt sådant som ändå fångar den väsentliga fysiken. Det gör det enklare att förutsäga när rullning förblir måttlig och när den kan eskalera mot resonans eller kaos. På längre sikt kan sådana metoder vägleda bättre skrovdesigner, smartare rulldämpande lösningar och klarare driftinstruktioner, så att fartyg kan navigera i hårt väder med större säkerhetsmarginal.
Citering: Moatimid, G.M., Mohamed, M.A.A. & Abohamer, M.K. Inspection of stability of a general roll-damping of a ship via non-perturbative approach. Sci Rep 16, 7471 (2026). https://doi.org/10.1038/s41598-026-38505-8
Nyckelord: fartygsrullning, rulldämpning, icke-linjär dynamik, stabilitetsanalys, parametrisk resonans