Clear Sky Science · ru
Управление квадрокоптером, устойчивое к возмущениям, с использованием гибридного ЛКР и суперскручивающего скользящего режима
Стабильность для малых летательных аппаратов
От доставки посылок до поисково-спасательных операций — от маленьких дронов требуют полётов в запутанных реальных условиях: порывистый ветер, садящиеся батареи, меняющиеся полезные нагрузки и даже выходящие из строя двигатели. При этом большинство дронов по-прежнему полагается на системы управления, предполагающие спокойную и предсказуемую среду. В этой статье представлен новый подход, позволяющий удерживать учебную квадрокоптерную платформу устойчивой и безопасной при возникновении неисправностей, с прицелом на более надёжные полёты будущих воздушных роботов над городами, фермами и зонами бедствий.
Почему балансировать дроном так сложно
Квадрокоптеры похожи на летящих канатоходцев: им приходится постоянно балансировать по трём основным углам — рыскание, тангаж и крен — используя всего четыре вращающихся винта. В теории классические методы управления способны поддерживать их стабильность, когда условия соответствуют математической модели. На практике дроны сталкиваются с ветром, смещением веса, износом двигателей и шумом датчиков. Более продвинутые подходы, такие как модельно-прогнозирующее управление и различные варианты скользящего режима и адаптивного управления, справляются с частью этих проблем, но часто требуют больших вычислительных ресурсов и тонкой настройки. Авторы поставили цель найти золотую середину: контроллер, устойчивый к плохим условиям, но достаточно простой для реализации на реальном оборудовании.
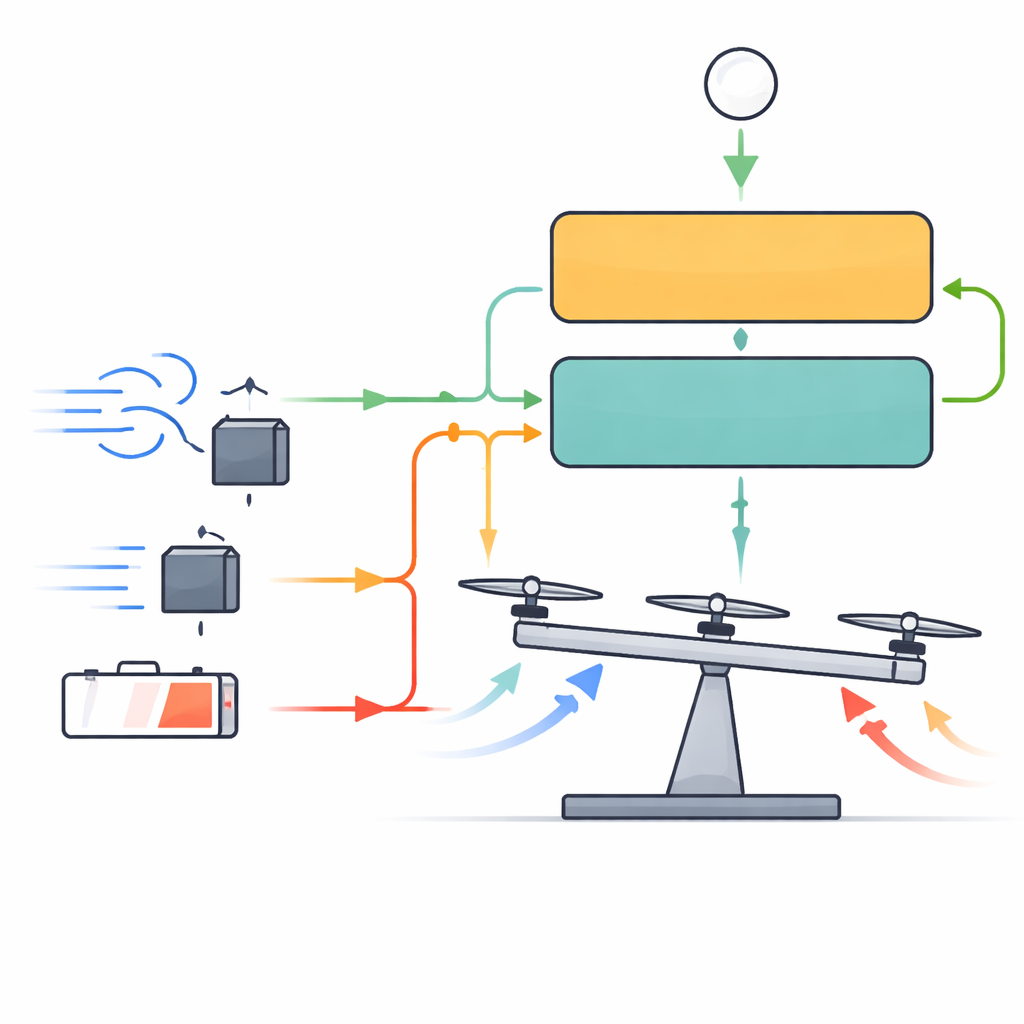
Двухслойный «мозг» для дрона
Исследование вводит гибридную схему управления с двумя уровнями, действующими совместно. Внутренний уровень использует широко известный метод линейно-квадратичного регулятора (ЛКР), который хорошо поддерживает плавность и энергоэффективность системы, когда модель точна, а возмущения малы. Снаружи к нему добавлен более жёсткий слой, основанный на технике, называемой суперскручивающим скользящим режимом. Этот внешний слой постоянно отслеживает отклонения системы от желаемого движения и генерирует корректирующее смещение — своего рода подвижную цель, за которой затем следует внутренний регулятор. Вместо того чтобы напрямую дергать моторы, робастный слой перестраивает задающий сигнал для внутреннего контроллера, чтобы дрон вел себя так, будто возмущения исчезли.
Обучение контроллера справляться с неожиданностями
Чтобы сделать внешний уровень максимально эффективным, авторы автоматически настраивают его ключевые параметры с помощью метаэвристического метода оптимизации, игриво названного Большой Взрыв–Большой Сжатие. В этом поиске в симуляции пробуют множество кандидатных наборов параметров, оценивают их по тому, насколько они снижают ошибку слежения с течением времени, а затем сжимают область поиска в направлении лучших решений, пока не находят эффективную комбинацию. Полный гибридный контроллер тестируют на трёхстепенной системе зависания из коммерческого лабораторного стенда, где штанга с четырьмя роторами может вращаться в рыскании, тангаже и крене вокруг шарнира. Такая установка отражает ключевую задачу балансирования квадрокоптера, оставаясь при этом безопасно закреплённой на скамье.
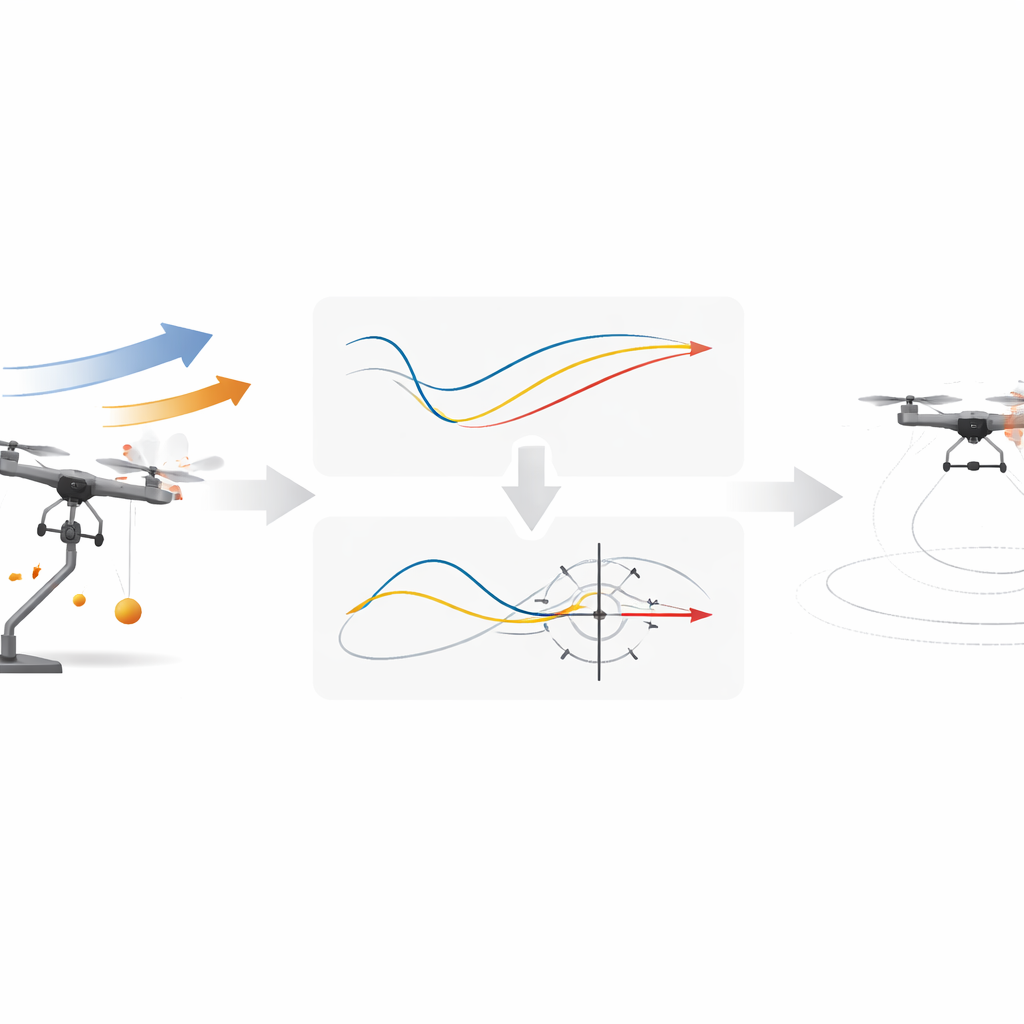
Стресс-тесты в виртуальном небе
Исследователи сравнивают три подхода — классический ЛКР, модельно-прогнозирующее управление и новый гибридный контроллер — в четырёх требовательных сценариях. Во-первых, они добавляют постоянные ветровые силы по всем осям; во-вторых, постепенно ослабляют тягу моторов, имитируя разряжающуюся батарею; в-третьих, полностью отключают один мотор на короткий интервал; и в-четвёртых, сбрасывают тяжелую полезную нагрузку в середине полёта, резко меняя массу и баланс системы. Для каждого случая измеряются несколько показателей ошибки, отражающих величину отклонений, их длительность и скорость установления. Также исследователи реконструируют трёхмерное движение кончика ротора, чтобы увидеть в пространстве, насколько плотно каждый контроллер ограничивает движение.
Что показывают результаты
Во всех сценариях гибридный контроллер не только удерживает платформу стабильной, но и уменьшает ошибки слежения на порядки по сравнению с ЛКР и модельно-прогнозирующим управлением. Хотя предиктивный контроллер часто сначала реагирует быстрее, он склонен дрейфовать или испытывать трудности, когда реальная система перестаёт соответствовать модели — например, после сброса полезной нагрузки или при изменении характеристик тяги. Гибридная схема, напротив, отмахивается от таких несоответствий: внешний робастный слой компенсирует влияние возмущений и сдвигов параметров, позволяя внутреннему уровню делать то, что он умеет лучше всего. Визуальная реконструкция траекторий роторов подтверждает это: движение под управлением гибрида остаётся в плотной оболочке, что указывает на меньшие колебания и лучшую практическую устойчивость.
Что это значит для повседневных дронов
Проще говоря, в статье показано, что двухслойный «мозг» для дрона — одна часть плавная и экономная, другая — прочная и устойчиво реагирующая на возмущения — может значительно повысить способность аппарата сохранять вертикальность и курс, когда мир ведёт себя непредсказуемо. Поскольку подход относительно прост и нетребователен к вычислениям, он хорошо подходит для реальной бортовой электроники, а не только для симуляций. По мере того как этот метод будет переноситься из лабораторного стенда на полностью свободно летающие дроны, он может помочь будущим воздушным роботам нести грузы, переживать внезапные отказы и работать безопаснее в непредсказуемом воздушном пространстве над нами.
Цитирование: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Ключевые слова: управление квадрокоптером, отказоустойчивый полёт, робастная стабилизация дрона, гибридные системы управления, воздушные и полезные нагрузки возмущения