Clear Sky Science · pt
Controle de quadrotor tolerante a perturbações usando uma abordagem híbrida LQR e modo deslizante super-twisting
Mantendo Pequenas Máquinas Voadores Estáveis
De entrega de pacotes a buscas e resgates, pequenos drones estão sendo solicitados a voar em condições reais turbulentas — rajadas de vento, baterias desgastando, mudanças de carga, até motores com falha. Ainda assim, a maioria dos drones continua a depender de sistemas de controle que assumem um mundo calmo e previsível. Este artigo apresenta uma nova forma de manter uma plataforma de treino tipo quadrotor estável e segura quando algo dá errado, visando voos mais confiáveis para futuros robôs aéreos que operem sobre cidades, fazendas e zonas de desastre.
Por que Balancear um Drone é Tão Difícil
Drones quadrotor são como equilibristas voadores: precisam balancear continuamente três ângulos principais — guinada (yaw), arfagem (pitch) e rolamento (roll) — usando apenas quatro hélices giratórias. Na teoria, métodos clássicos de controle podem mantê‑los estáveis quando as condições correspondem às equações. Na prática, drones enfrentam vento, deslocamento de massa, desgaste de motores e ruído nos sensores. Abordagens mais avançadas, como controle preditivo baseado em modelo e várias versões de modo deslizante e controle adaptativo, conseguem lidar com alguns desses problemas, mas frequentemente exigem alto poder de computação e ajuste fino complexo. Os autores buscaram um meio-termo: um controlador robusto a condições adversas, porém simples o bastante para implementar em hardware real.
Um "Cérebro" em Duas Camadas para o Drone
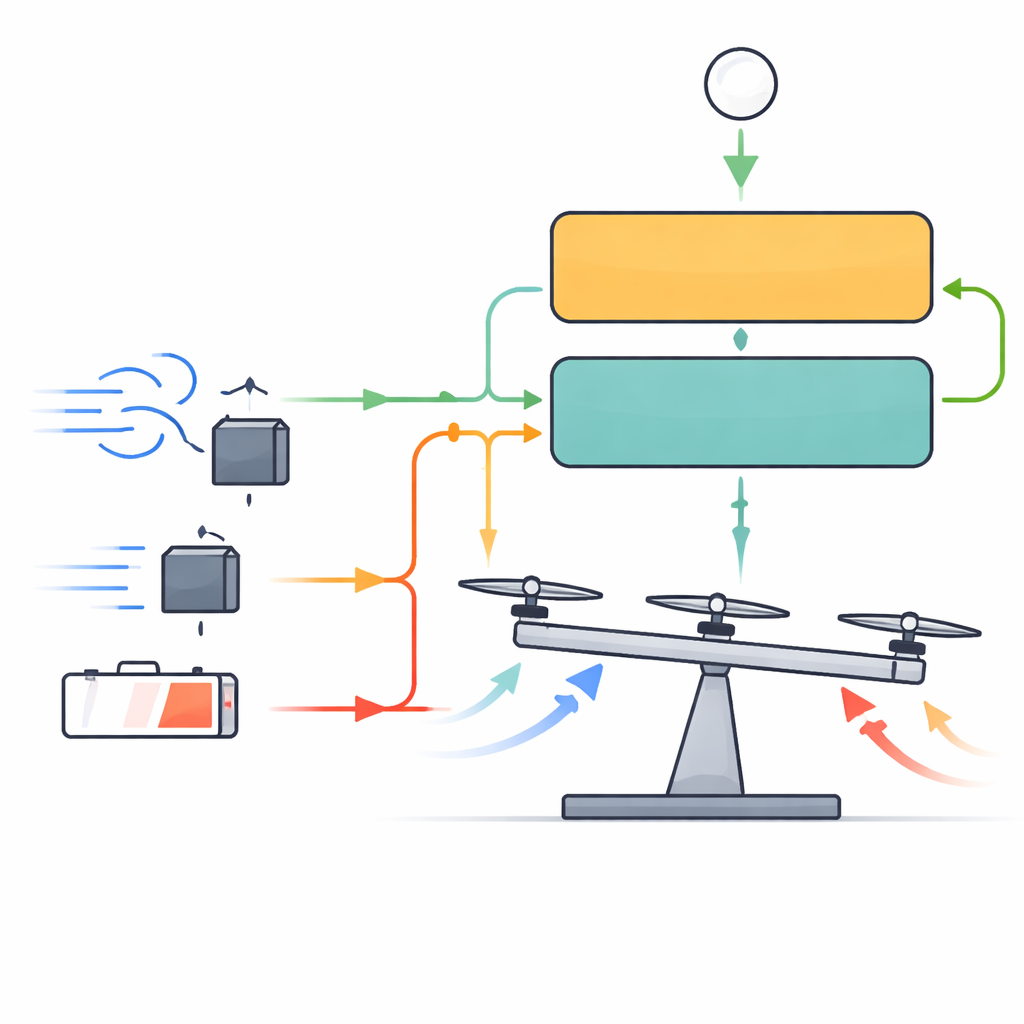
O estudo introduz um esquema de controle híbrido com duas camadas que trabalham em conjunto. A camada interna usa um método bem conhecido chamado Regulador Linear Quadrático (LQR), que é muito eficaz em manter o sistema suave e energeticamente eficiente quando o modelo é preciso e as perturbações são leves. Ao seu redor, os pesquisadores adicionam uma segunda camada mais robusta baseada em uma técnica chamada controle em modo deslizante super-twisting. Essa camada externa observa constantemente como o sistema se desvia do movimento desejado e gera um deslocamento corretivo — uma espécie de alvo móvel — que a camada interna então rastreia. Em vez de atuar diretamente nos motores, a camada robusta remodela o sinal de referência fornecido ao controlador interno, de modo que o drone se comporte como se as perturbações tivessem desaparecido.
Ensinando o Controlador a Lidar com o Imprevisível
Para tornar a camada externa o mais eficaz possível, os autores afinam automaticamente seus parâmetros-chave usando um método de otimização metaheurístico chamado Big Bang–Big Crunch. Nesse processo de busca, muitos conjuntos de parâmetros candidatos são testados em simulação, avaliados por quão bem reduzem o erro de rastreamento ao longo do tempo, e então contraídos em direção à melhor região até que se encontre uma combinação eficiente. O controlador híbrido completo é testado em um sistema de sustentação com três graus de liberdade de um equipamento de laboratório comercial, onde uma barra com quatro rotores pode girar em yaw, pitch e roll em torno de um pivô. Esse arranjo captura o desafio essencial do equilíbrio de um quadrotor enquanto permanece seguramente fixado a uma bancada.
Testes de Estresse em Céus Virtuais
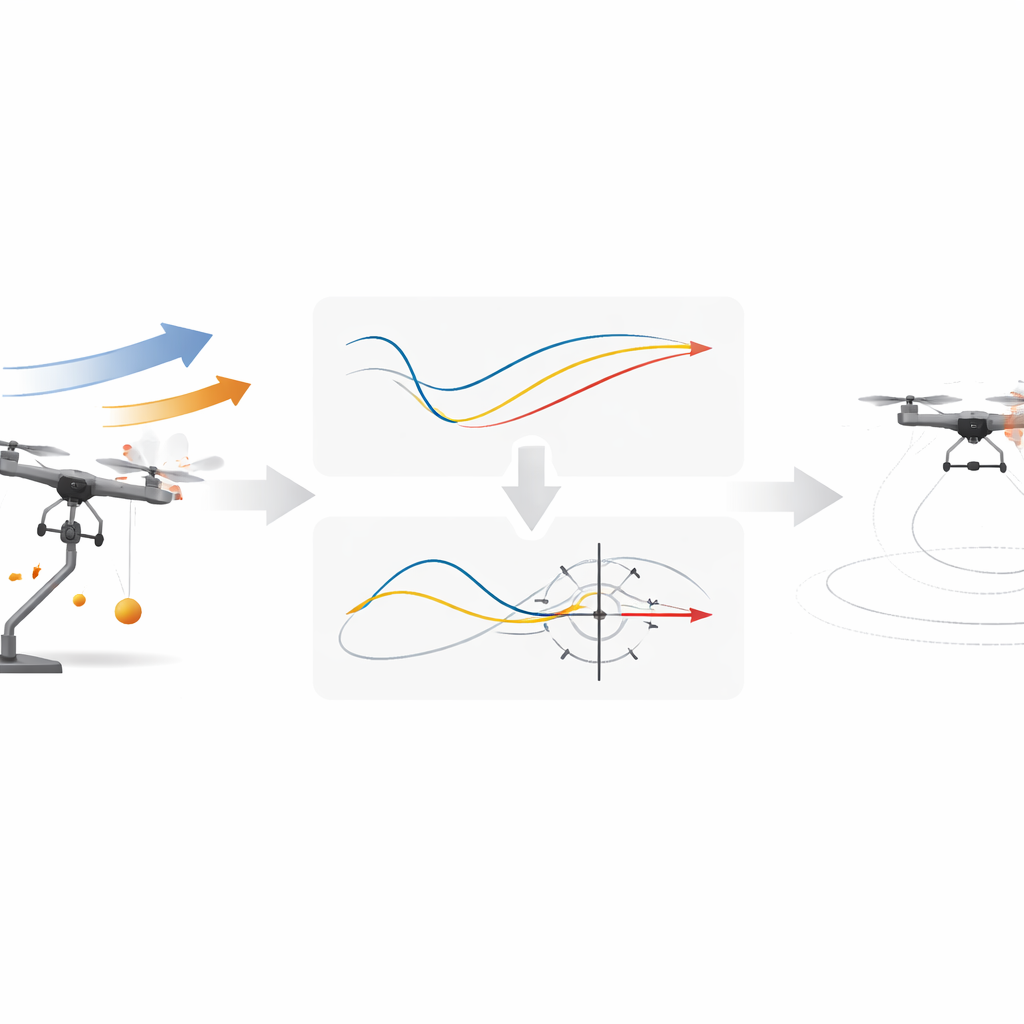
Os pesquisadores comparam três abordagens — LQR clássico, controle preditivo baseado em modelo e o novo controlador híbrido — em quatro cenários exigentes. Primeiro, adicionam forças de vento constantes ao longo de todos os eixos; segundo, enfraquecem gradualmente o empuxo dos motores para simular uma bateria descarregando; terceiro, desligam completamente um motor por um curto intervalo; e quarto, soltam uma carga pesada no meio do voo, alterando subitamente a massa e o equilíbrio do sistema. Para cada caso, medem diversos índices de erro que capturam o quanto os desvios são grandes, quanto tempo duram e com que rapidez o sistema se restabelece. Também reconstruem o movimento tridimensional da ponta de um rotor para ver, em espaço, quão confinados os movimentos ficam sob cada controlador.
O que os Resultados Mostram
Em todos os cenários, o controlador híbrido não apenas mantém a plataforma estável, como também reduz os erros de rastreamento por ordens de magnitude em comparação com LQR e controle preditivo. Enquanto o controlador preditivo muitas vezes reage mais rápido inicialmente, tende a derivar ou a ter dificuldades quando o modelo subjacente deixa de corresponder à realidade — por exemplo, após a queda de uma carga ou quando as características de empuxo mudam. O esquema híbrido, em contraste, despreza essas discrepâncias: a camada externa robusta cancela o efeito das perturbações e das mudanças de parâmetro, permitindo que a camada interna faça o que sabe fazer de melhor. As trajetórias reconstruídas dos rotores confirmam isso visualmente: o movimento sob o controlador híbrido permanece confinado a um invólucro estreito, indicando oscilações menores e melhor estabilidade prática.
O que Isso Significa para Drones do Dia a Dia
Em termos simples, o artigo demonstra que dar a um drone um "cérebro" de controle em duas camadas — uma parte suave e eficiente, outra parte resistente e tolerante a perturbações — pode aumentar muito sua capacidade de se manter ereto e na rota quando o mundo não se comporta como esperado. Como a abordagem é relativamente simples e leve em termos computacionais, ela é bem adequada para eletrônica embarcada real, não apenas para simulações. À medida que esse método for levado do arranjo de laboratório para drones livremente voadores, ele pode ajudar futuros robôs aéreos a transportar cargas, sobreviver a falhas súbitas e operar com mais segurança no ar imprevisível acima de nós.
Citação: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Palavras-chave: controle de quadrotor, voo tolerante a falhas, estabilização robusta de drones, sistemas de controle híbridos, perturbações de vento e carga