Clear Sky Science · pt
Abordagem complementar de localização visual e mapeamento tátil para percepção robótica de objetos de tamanho milimétrico com superfícies irregulares
Robôs que Podem Ver e Sentir
Em muitos locais perigosos — desde estações espaciais até áreas de acidentes nucleares — os humanos dependem de robôs para manusear pequenos interruptores, comprimidos, parafusos e botões. Mas os “olhos” robóticos comuns frequentemente falham quando a iluminação é ruim ou os objetos são muito pequenos e irregulares. Este artigo apresenta um sistema de percepção robótica que combina visão e tato, inspirado na forma como as pessoas primeiro observam um objeto e depois o exploram com as pontas dos dedos.

Por Que Apenas a Visão Não Basta
A maioria dos robôs modernos depende de câmeras e sensores de profundidade para reconhecer objetos e decidir como agir. Essas ferramentas visuais funcionam bem em fábricas limpas e bem iluminadas, mas têm dificuldades quando a cena está escura, congestionada ou parcialmente oculta. Os autores mostram que até sistemas de câmera potentes podem perder o rastreamento de itens pequenos ou deixar de captar detalhes finos da superfície, especialmente sob pouca luz ou reflexos. Nesses casos, o robô pode saber, de forma aproximada, onde algo está, mas não se há microaspersões, reentrâncias ou bordas irregulares que são cruciais para agarrar ou pressionar com precisão.
Construindo um Dedo que Pode Sentir Detalhes Minúsculos
Para enfrentar esse problema, os pesquisadores construíram um sensor de toque macio, com aspecto de pele, que se comporta mais como a ponta de um dedo humano. Usando impressão por jato de tinta, eles depositaram trilhas metálicas flexíveis sobre um material elástico semelhante a borracha, formando uma grade de pixels sensíveis à pressão. Entre as camadas metálicas há um filme texturizado fabricado com lixa comum, conferindo ao sensor uma estrutura fina e irregular que aumenta sua sensibilidade. Quando o sensor é pressionado contra um objeto, seu sinal elétrico varia com a pressão, permitindo detectar toques muito leves — até o nível de um pequeno grão de arroz — e resistir a milhares de ciclos de pressão sem perda de desempenho.
Convertendo o Toque em Mapas de Forma
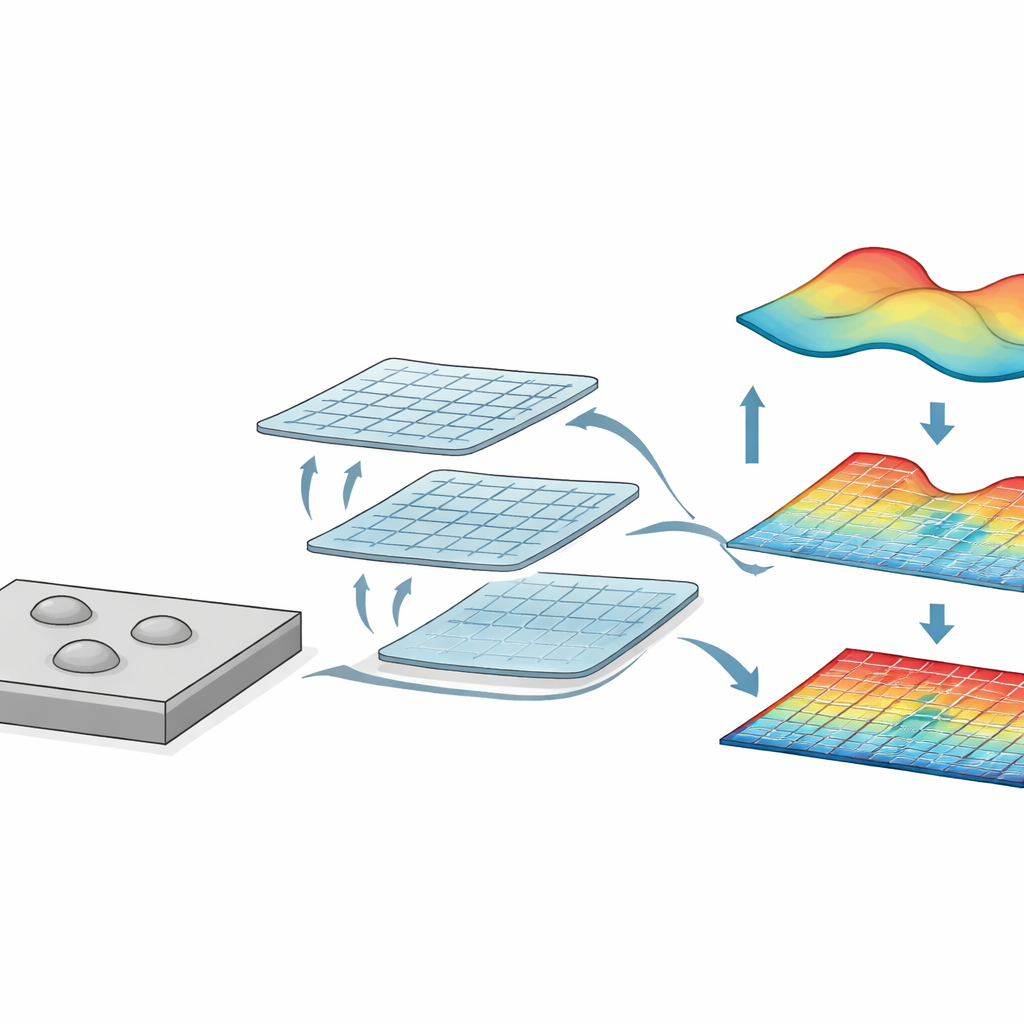
O sensor macio foi então ampliado para uma pequena matriz capaz de capturar padrões de pressão sobre uma área, muito parecido com uma imagem de baixa resolução. Quando a equipe pressionou objetos em forma de anel ou outras geometrias complexas contra o sensor, os mapas de pressão resultantes revelaram claramente seus contornos e regiões vazias, mostrando que o sensor pode “ver” formas pelo toque. Simulações computacionais confirmaram que o material macio concentra o estresse localmente, similar à pele humana, o que ajuda a captar diferenças finas de altura e textura em características de escala milimétrica, como pequenos relevos ou protuberâncias na superfície.
Pondo Visão e Tato para Trabalhar Juntos
O sistema completo usa uma câmera RGB-Profunidade para localizar onde um objeto está no espaço e uma almofada tátil macia para explorar sua superfície. Primeiro, a câmera estima a posição e a forma geral do objeto à distância, da mesma forma que uma pessoa lança um olhar a uma mesa antes de alcançar algo. Quando as informações visuais ficam pouco confiáveis — por causa de sombras, reflexos ou problemas de foco — o robô aproxima seu sensor tátil ao objeto. Ao escanear a almofada por diferentes partes da superfície e costurar os dados de pressão, o sistema reconstrói um perfil tridimensional de características de apenas alguns milímetros, como as cúpulas elevadas de comprimidos em uma cartela ou pequenos relevos em um painel de controle.
O Que Isso Significa para Robôs do Futuro
Ao fundir a localização baseada em câmera com mapeamento detalhado por toque, este trabalho demonstra como robôs podem manipular objetos pequenos e irregulares mesmo quando não podem depender inteiramente da visão. O estudo mostra que um sensor impresso simples e de baixo custo pode tanto complementar quanto, quando necessário, substituir a visão. Isso prepara o terreno para robôs futuros que se adaptam a condições mutáveis, combinando visão e tato da mesma forma que os humanos para executar tarefas precisas em ambientes sujos, imprevisíveis ou perigosos.
Citação: Jang, J., Park, BS., Oh, K.T. et al. Complementary visual localization and tactile mapping approach for robotic perception of millimeter-sized objects with irregular surfaces. Microsyst Nanoeng 12, 91 (2026). https://doi.org/10.1038/s41378-026-01190-8
Palavras-chave: robôs humanoides, sensoriamento tátil, percepção multimodal, micromanipulação, visão RGB-profundidade