Clear Sky Science · pl
Sterowanie quadrotorem odporne na zakłócenia z użyciem hybrydowego LQR i super-twisting sliding mode
Utrzymanie małych maszyn latających w stabilności
Od dostaw paczek po akcje poszukiwawczo-ratownicze, małe drony muszą działać w złożonych warunkach rzeczywistego świata — porywisty wiatr, rozładowujące się baterie, zmieniające się ładunki, a nawet awarie silników. A jednak większość dronów wciąż polega na systemach sterowania zakładających, że otoczenie jest spokojne i przewidywalne. W artykule przedstawiono nowy sposób utrzymania platformy treningowej typu quadrotor w stabilności i bezpieczeństwie, gdy coś idzie nie tak, z myślą o bardziej niezawodnym locie przyszłych robotów powietrznych nad miastami, gospodarstwami i strefami katastrof.
Dlaczego utrzymanie równowagi drona jest takie trudne
Drony quadrotor przypominają latających akrobatów na linie: muszą nieustannie równoważyć się wokół trzech głównych kątów — yaw, pitch i roll — używając zaledwie czterech wirujących śmigieł. W teorii klasyczne metody sterowania potrafią utrzymać je stabilnymi, gdy warunki zgadzają się z matematycznym modelem. W praktyce drony zmagają się z wiatrem, przesunięciami masy, zużyciem silników i szumem czujników. Bardziej zaawansowane podejścia, takie jak sterowanie predykcyjne czy różne odmiany sliding mode i sterowania adaptacyjnego, radzą sobie z niektórymi z tych problemów, ale często wymagają dużej mocy obliczeniowej i skomplikowanego strojenia. Autorzy szukali kompromisu: regulatora odpornego na trudne warunki, lecz na tyle prostego, by dało się go wdrożyć na rzeczywistym sprzęcie.
Dwuwarstwowy „mózg” drona
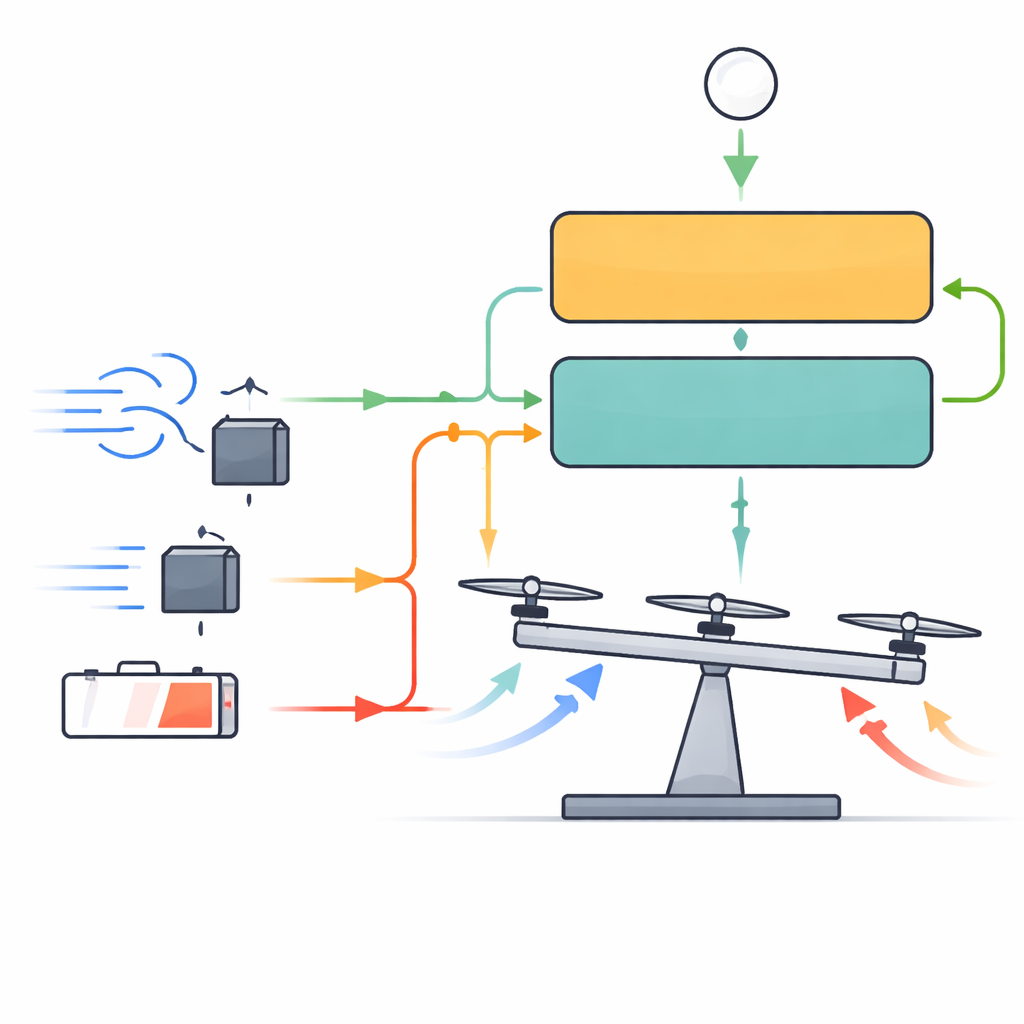
Badanie wprowadza hybrydowy schemat sterowania z dwiema współdziałającymi warstwami. Warstwa wewnętrzna wykorzystuje dobrze znaną metodę regulatora liniowo-kwadratowego (LQR), która świetnie utrzymuje układ płynny i energooszczędny, gdy model jest dokładny, a zakłócenia niewielkie. Wokół niej autorzy umieszczają drugą, bardziej wytrzymałą warstwę opartą na technice zwanej super-twisting sliding mode control. Ta zewnętrzna warstwa stale obserwuje odchylenia od pożądanego ruchu i generuje korekcyjny przesunięty cel — coś w rodzaju ruchomego punktu odniesienia — który warstwa wewnętrzna ma śledzić. Zamiast bezpośrednio „szarpać” silnikami, warstwa odporna przekształca sygnał odniesienia przekazywany do regulatora wewnętrznego, dzięki czemu dron zachowuje się tak, jakby zakłócenia nie występowały.
Nauka radzenia sobie z niespodziewanym
Aby warstwa zewnętrzna była jak najskuteczniejsza, autorzy automatycznie stroją jej kluczowe parametry przy użyciu metaheurystycznej metody optymalizacji o nazwie Big Bang–Big Crunch. W tym procesie poszukiwania wiele kandydackich zestawów parametrów jest testowanych w symulacji, ocenianych pod kątem zmniejszania błędu śledzenia w czasie, a następnie skupianych wokół najlepszego regionu, aż znajdzie się wydajna kombinacja. Pełny kontroler hybrydowy testowano na trójstopniowym układzie zawisu z komercyjnego stanowiska laboratoryjnego, gdzie belka z czterema wirnikami może obracać się w yaw, pitch i roll wokół zawiasu. Układ ten oddaje zasadnicze wyzwanie równowagi quadrotora, pozostając jednocześnie bezpiecznie przytwierdzonym do stanowiska.
Testy wytrzymałości w wirtualnym niebie
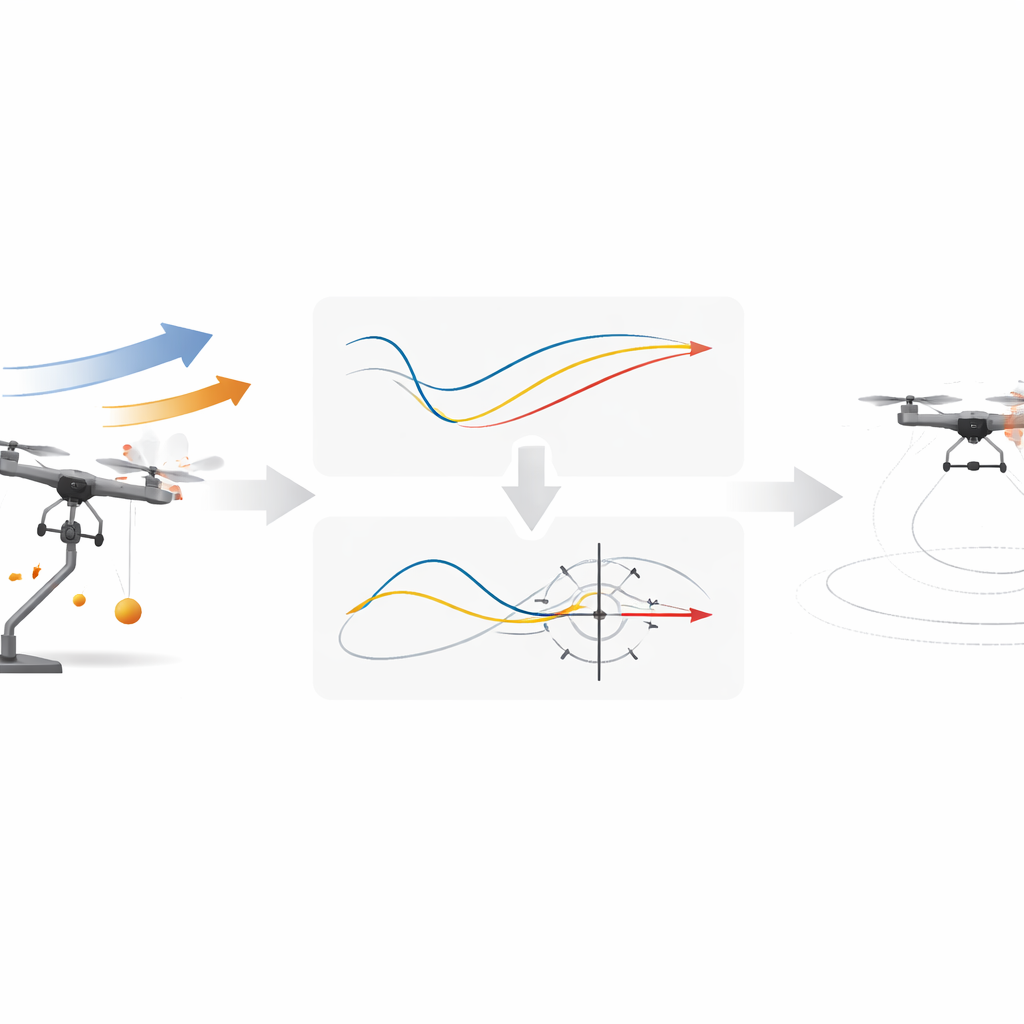
Naukowcy porównali trzy podejścia — klasyczny LQR, sterowanie predykcyjne oraz nowy kontroler hybrydowy — w czterech wymagających scenariuszach. Po pierwsze dodali stałe siły wiatru we wszystkich osiach; po drugie stopniowo osłabili ciąg silników, by zasymulować rozładowującą się baterię; po trzecie tymczasowo wyłączyli jeden silnik; po czwarte zrzucili ciężki ładunek w trakcie lotu, nagle zmieniając masę i równowagę układu. Dla każdego przypadku mierzyli kilka wskaźników błędu opisujących, jak duże są odchylenia, jak długo trwają i jak szybko układ się ustabilizuje. Odtworzyli też trójwymiarowy ruch końcówki wirnika, aby zobaczyć przestrzennie, jak ciasno każdy regulator ogranicza ruchy.
Co pokazują wyniki
We wszystkich scenariuszach kontroler hybrydowy nie tylko utrzymywał platformę w stabilności, lecz także redukował błędy śledzenia o rzędy wielkości w porównaniu zarówno z LQR, jak i ze sterowaniem predykcyjnym. Chociaż regulator predykcyjny często reagował szybciej na początku, miał tendencję do dryfowania lub problemów, gdy model przestał odzwierciedlać rzeczywistość — na przykład po zrzuceniu ładunku lub przy zmianie charakterystyki ciągu. Schemat hybrydowy przeciwnie, ignorował te niedopasowania: zewnętrzna warstwa odporna niwelowała wpływ zakłóceń i zmian parametrów, pozwalając warstwie wewnętrznej robić to, co potrafi najlepiej. Odtworzone trajektorie wirnika potwierdzają to wizualnie: ruch pod kontrolerem hybrydowym pozostaje zamknięty w ciasnym obrysie, co wskazuje na mniejsze oscylacje i lepszą praktyczną stabilność.
Co to znaczy dla codziennych dronów
Mówiąc prosto, artykuł pokazuje, że wyposażenie drona w dwuwarstwowy „mózg” sterujący — jedna część gładka i efektywna, druga twarda i odporna na zakłócenia — może znacznie zwiększyć jego zdolność do utrzymania pionu i kursu, gdy świat nie zachowuje się zgodnie z oczekiwaniami. Ponieważ podejście jest stosunkowo proste i niewymagające obliczeniowo, nadaje się dobrze do rzeczywistej elektroniki pokładowej, nie tylko do symulacji. W miarę przenoszenia tej metody z laboratoryjnego stanowiska na w pełni latające drony, może pomóc przyszłym robotom powietrznym przenosić ładunki, przetrwać nagłe awarie i działać bezpieczniej w nieprzewidywalnym powietrzu nad nami.
Cytowanie: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Słowa kluczowe: sterowanie quadrotorem, lot odporny na uszkodzenia, odporna stabilizacja drona, systemy sterowania hybrydowego, zakłócenia wiatru i ładunku