Clear Sky Science · nl
Stooringtolerante quadrotorbesturing met een hybride LQR- en super-twisting sliding mode-aanpak
Kleine vliegmachines stabiel houden
Van pakketbezorging tot zoek‑en‑redding: kleine drones moeten vliegen in rommelige reële omstandigheden—vlaagachtige wind, teruglopende batterijen, wisselende beladingen, zelfs uitvallende motoren. Toch vertrouwen de meeste drones nog op regelsystemen die veronderstellen dat de wereld kalm en voorspelbaar is. Dit artikel presenteert een nieuwe manier om een quadrotor‑achtig trainingsplatform stabiel en veilig te houden wanneer er iets misgaat, met als doel betrouwbaardere vluchten voor toekomstige luchtrobots boven steden, landbouwgebieden en rampgebieden.
Waarom het lastig is een drone in balans te houden
Quadrotor‑drones lijken op vliegende koorddansers: ze moeten continu balanceren rond drie hoofdhoeken—yaw, pitch en roll—met slechts vier ronddraaiende propellers. In theorie kunnen klassieke regelmethoden ze stabiel houden wanneer de omstandigheden overeenkomen met de wiskunde op papier. In de praktijk krijgen drones te maken met wind, verschuivend gewicht, slijtage in motoren en sensorruis. Geavanceerdere benaderingen zoals model predictive control en verschillende varianten van sliding mode- en adaptieve besturing kunnen een deel van deze problemen aan, maar vereisen vaak zware berekeningen en nauwkeurige afstemming. De auteurs zoeken een middenweg: een regelaar die robuust is tegen ongunstige omstandigheden, maar eenvoudig genoeg om op echte hardware te implementeren.
Een twee‑laagse "hersenen" voor de drone
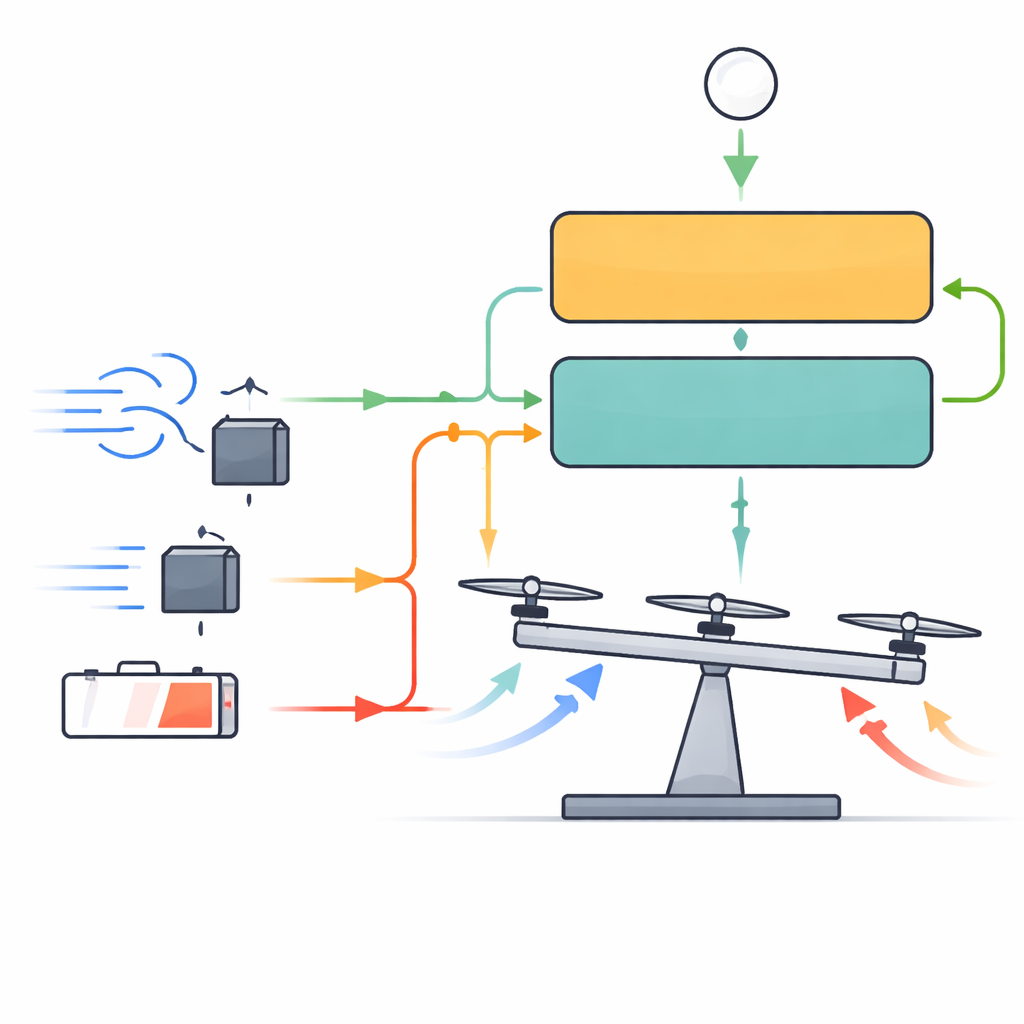
De studie introduceert een hybride regelschema met twee lagen die samenwerken. De binnenste laag gebruikt een bekende methode genaamd Linear Quadratic Regulator, die zeer goed is in het behouden van een soepele en energiezuinige respons wanneer het model nauwkeurig is en storingen beperkt. Daaromheen plaatsen de onderzoekers een tweede, robuustere laag gebaseerd op een techniek genaamd super‑twisting sliding mode control. Deze buitenste laag houdt continu in de gaten hoe het systeem afwijkt van de gewenste beweging en genereert een corrigerende offset—een soort bewegend doel—dat de binnenste laag vervolgens volgt. In plaats van rechtstreeks aan de motoren te trekken, herschikt de robuuste laag het referentiesignaal dat aan de binnenregelaar wordt gevoed, zodat de drone zich gedraagt alsof de storingen verdwenen zijn.
De regelaar leren omgaan met het onverwachte
Om de buitenste laag zo effectief mogelijk te maken, stemmen de auteurs de belangrijkste parameters automatisch af met een metaheuristische optimalisatiemethode die op speelse wijze Big Bang–Big Crunch heet. In dit zoekproces worden veel kandidaat‑parametercombinaties in simulatie uitgeprobeerd, beoordeeld op hoe goed ze de volgfout in de tijd verminderen, en vervolgens samengebracht richting de beste regio totdat een efficiënte combinatie is gevonden. De complete hybride regelaar wordt getest op een drie‑vrijheidsgraden hover‑systeem uit een commercieel laboratoriumopstelling, waarin een balk met vier rotors kan draaien in yaw, pitch en roll rond een scharnierpunt. Deze opstelling vangt de essentiële balanceeruitdaging van een quadrotor terwijl hij veilig aan een bank is vastgemaakt.
Stress‑testen in virtuele luchten
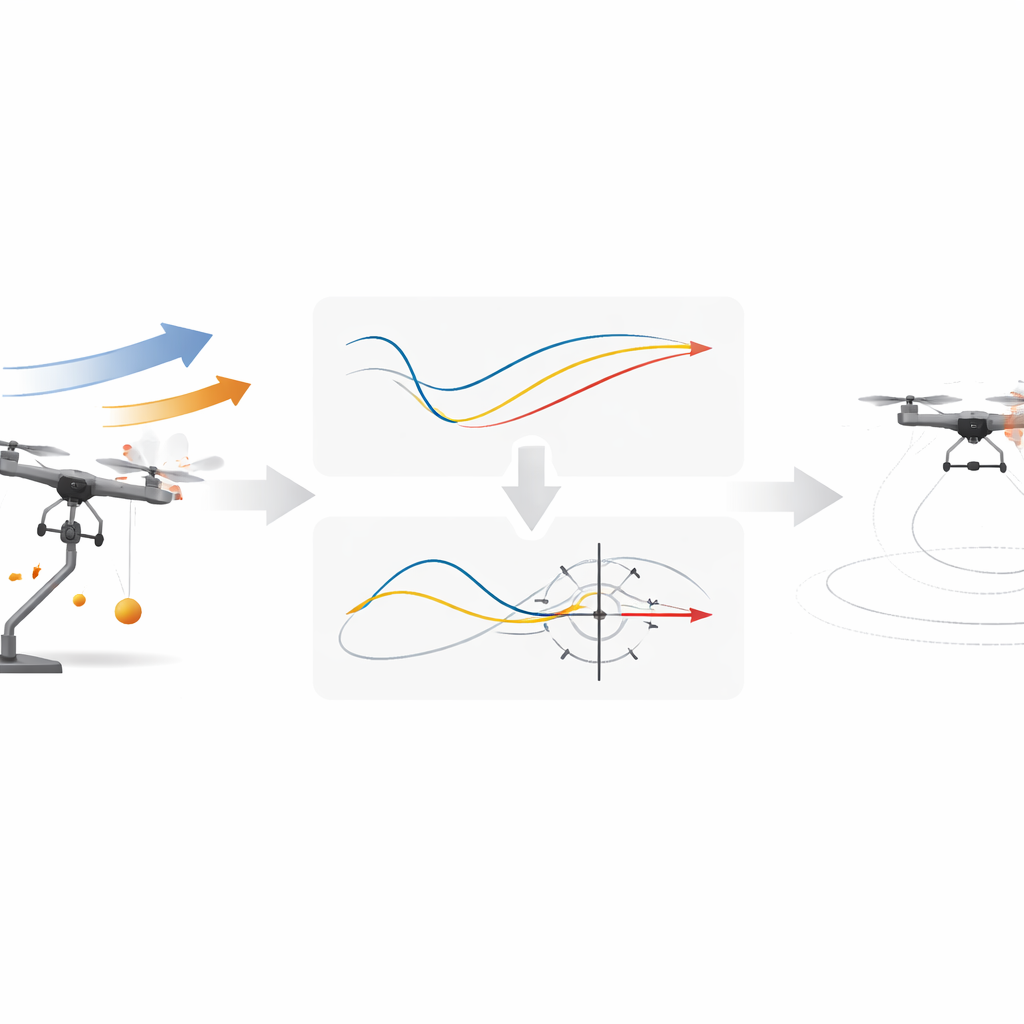
De onderzoekers vergelijken drie benaderingen—klassieke LQR, model predictive control en de nieuwe hybride regelaar—over vier veeleisende scenario’s. Ten eerste voegen ze constante windkrachten langs alle assen toe; ten tweede verzwakken ze geleidelijk de motorstuwkracht om een leeglopende batterij te simuleren; ten derde schakelen ze één motor tijdelijk volledig uit; en ten vierde laten ze halverwege de vlucht een zware lading vallen, waarmee de massa en het evenwicht van het systeem plotseling veranderen. Voor elk geval meten ze meerdere foutscores die vastleggen hoe groot de afwijkingen zijn, hoe lang ze aanhouden en hoe snel het systeem weer stabiliseert. Ze reconstrueren ook de driedimensionale beweging van een rotorbladpunt om ruimtelijk te zien hoe goed elke regelaar de beweging beperkt.
Wat de resultaten laten zien
In alle scenario’s houdt de hybride regelaar het platform niet alleen stabiel, maar vermindert zij ook de volgfouten met ordegrenzen vergeleken met zowel LQR als model predictive control. Terwijl de predictieve regelaar vaak aanvankelijk sneller reageert, heeft deze de neiging te driften of problemen te krijgen wanneer het onderliggende model niet meer overeenkomt met de werkelijkheid—bijvoorbeeld na een ladingval of wanneer de stuwkrachtkarakteristieken veranderen. Het hybride schema negeert deze mismatches grotendeels: de buitenste robuuste laag heft het effect van storingen en parameterveranderingen op, waardoor de binnenste laag kan doen waar die het beste in is. De gereconstrueerde rotorbanen bevestigen dit visueel: de beweging onder de hybride regelaar blijft binnen een nauwe envelop, wat wijst op kleinere oscillaties en betere praktische stabiliteit.
Wat dit betekent voor alledaagse drones
Simpel gezegd laat het artikel zien dat het geven van een drone een twee‑laagse besturings"hersenen"—een deel soepel en efficiënt, een deel robuust en storingsbestendig—zijn vermogen om rechtop te blijven en op koers te blijven aanzienlijk kan vergroten wanneer de wereld zich onverwacht gedraagt. Omdat de aanpak relatief eenvoudig en rekentechnisch licht is, is zij goed geschikt voor echte boordelektronica, niet alleen voor simulaties. Wanneer deze methode van de labopstelling naar volledig vrij vliegende drones wordt gebracht, kan zij toekomstige luchtrobots helpen lasten te dragen, plotselinge storingen te overleven en veiliger te opereren in de onvoorspelbare lucht boven ons.
Bronvermelding: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Trefwoorden: quadrotorbesturing, vliegvermogen bij fouten, robuuste drone‑stabilisatie, hybride regelsystemen, wind- en ladingstoringen