Clear Sky Science · ja
ハイブリッドLQRとスーパー・トゥイスト滑りモード手法による擾乱耐性クアッドロータ制御
小型飛行機体を安定させ続ける
荷物配送から捜索救助まで、小型ドローンは強風、電池の劣化、搭載物の変化、モーターの不具合といった現実の乱れた条件で飛行することが求められています。それでも多くのドローンは世界が穏やかで予測可能であると想定した制御系に頼っています。本論文は、トレーニング用のクアッドロータ型プラットフォームが問題発生時にも安定かつ安全に保たれる新しい方法を提示し、都市や農場、災害現場で働く将来の空中ロボットの飛行信頼性向上を目指します。
ドローンの姿勢維持が難しい理由
クアッドロータは飛ぶ綱渡りのような存在で、4つの回転するプロペラだけで偏航(ヨー)、ピッチ、ロールという主に3つの角度を継続的に制御してバランスを取らねばなりません。理論上は古典的な制御法でもモデルが正確で擾乱が小さい場合には安定を保てますが、実際には風、重心の移動、モーターの摩耗、センサー雑音などが問題になります。モデル予測制御や滑りモード・適応制御などの高度な手法はこれらの一部に対処できますが、計算負荷や調整の煩雑さが伴うことが多いのです。著者らは、厳しい状況でも頑健でありながら実機への実装が容易な中庸の解を目指しました。
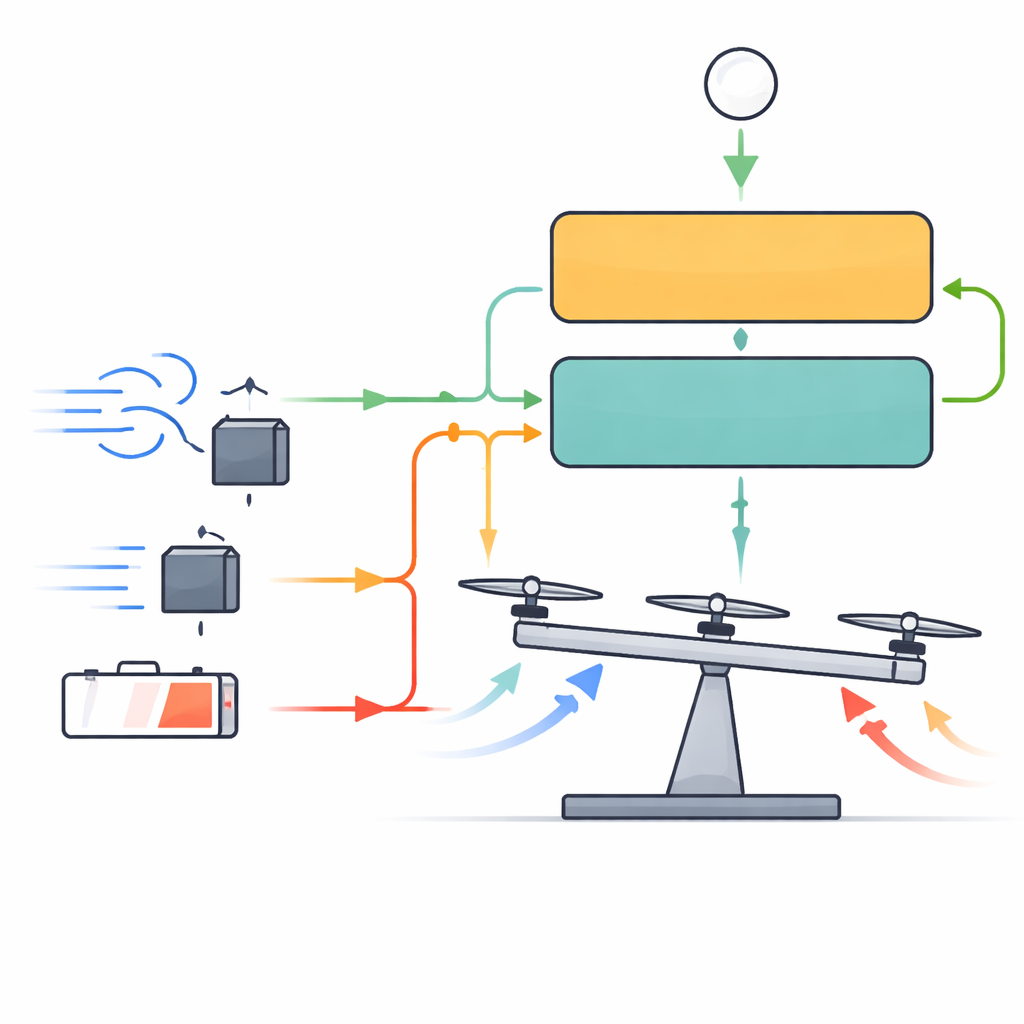
ドローンのための二層型「頭脳」
本研究は二層が協調するハイブリッド制御スキームを導入します。内側の層は線形二次レギュレータ(LQR)というよく知られた手法を用い、モデルが正確で擾乱が軽微な場合に系を滑らかかつエネルギー効率よく保つのに向いています。その周りに、スーパー・トゥイスト滑りモード制御と呼ばれるより頑強な外側の層を配置します。外層は常に望ましい運動からの偏差を監視し、補正オフセット—いわば内層が追従する可変の目標—を生成します。ロバスト層はモーターを直接乱暴に動かすのではなく、内側の制御器に供給される参照信号を再形成することで、擾乱が消えたかのように振る舞わせます。
想定外に対処するための学習
外層を最大限効果的にするために、著者らはその主要パラメータを自動的に調整するためのメタヒューリスティック最適化手法(Big Bang–Big Crunch)を採用します。この探索過程では多くの候補パラメータ集合をシミュレーションで試し、追従誤差が時間にわたってどれだけ小さくなるかで評価し、最良領域へと収縮させて効率的な組み合わせを見つけます。完全なハイブリッド制御器は市販の実験装置の三自由度ホバリング系で試験されます。この装置では4つのロータを備えたバーがピボットを中心にヨー・ピッチ・ロールで回転でき、クアッドロータの本質的なバランス課題を、作業台に安全に固定したまま再現します。
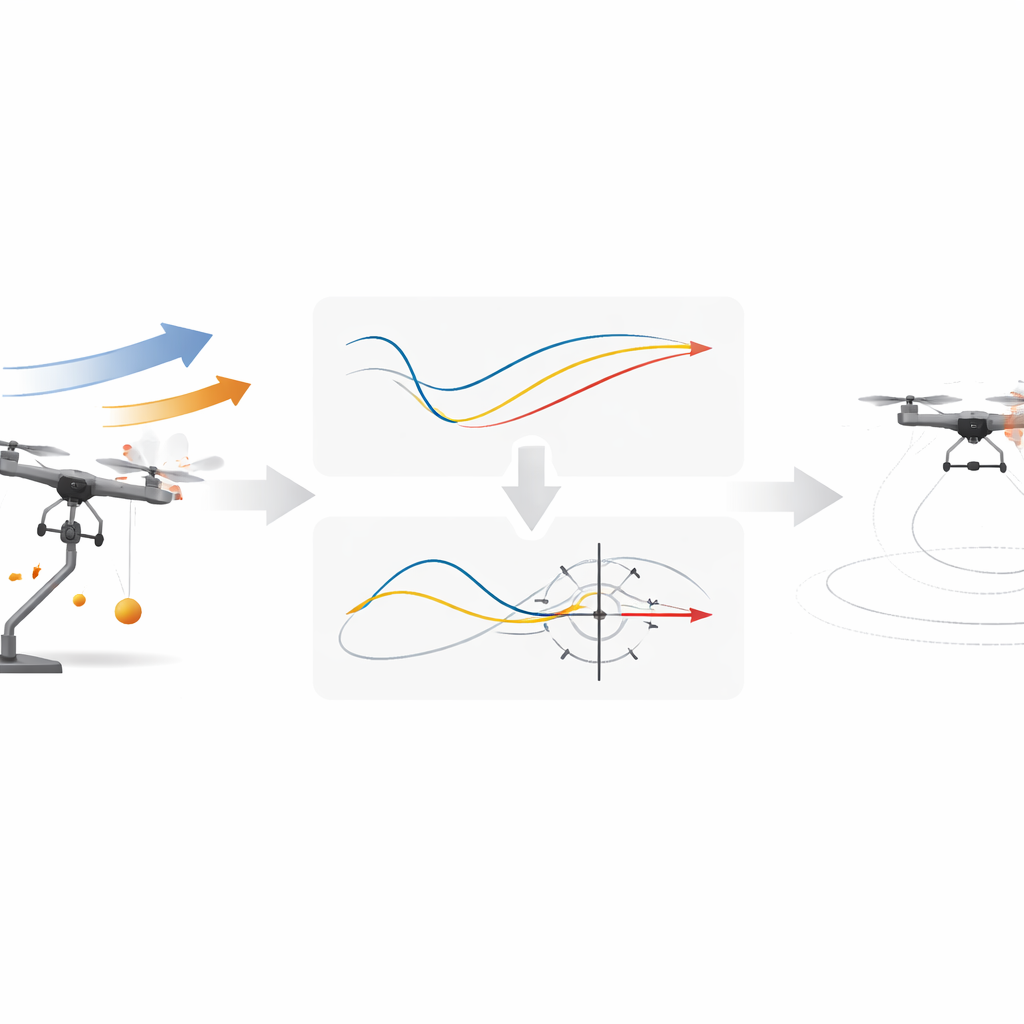
仮想空域でのストレス試験
研究者らは古典的なLQR、モデル予測制御、新しいハイブリッド制御の3手法を4つの厳しいシナリオで比較します。第一に全軸方向に一定の風力を加え、第二に電池消耗を模して推力を徐々に低下させ、第三に短時間ながら1つのモーターを完全に停止させ、第四に飛行中に重い荷物を落とし質量とバランスを突然変化させます。それぞれの場合について、偏差の大きさ、継続時間、再収束の速さを捉えるいくつかの誤差指標を測定します。またロータ先端の三次元軌跡を再構成し、空間的に各制御器が移動をどれだけ厳しく抑えているかを可視化します。
結果が示すこと
すべてのシナリオにおいて、ハイブリッド制御器はプラットフォームを安定に保つだけでなく、LQRやモデル予測制御と比べて追従誤差を桁違いに低減しました。モデル予測制御は初動で速く反応することが多い一方で、例えばペイロード落下後や推力特性が変化したときのように基礎となるモデルが現実と合わなくなると漂流したり苦戦したりする傾向がありました。これに対してハイブリッド方式はこれらの不一致をいなし、外側のロバスト層が擾乱やパラメータ変動の影響を打ち消すことで内層が本来の性能を発揮できます。再構成されたロータ軌跡はこれを視覚的にも確認させ、ハイブリッド制御下の運動は狭い包絡に収まっており、振動が小さく実用上の安定性が高いことを示しています。
日常のドローンにとっての意義
平たく言えば、本論文はドローンに二層の制御「頭脳」—一方は滑らかで効率的、もう一方は頑強で擾乱に強い—を与えることで、予期せぬ事態でも機体を起き上がらせ航路を維持する能力を大幅に高められることを示しています。手法は比較的単純で計算負荷も小さいため、単なるシミュレーションだけでなく実際の搭載電子機器にも適しています。ラボ機から自由飛行するドローンへとこの方法が移行すれば、将来の空中ロボットが荷物を運び、突然の故障をしのぎ、予測できない空域でより安全に運用されるのに寄与するでしょう。
引用: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
キーワード: クアッドロータ制御, 故障耐性のある飛行, ロバストなドローン安定化, ハイブリッド制御システム, 風やペイロードによる擾乱