Clear Sky Science · he
בקרת רב-סילוני חסינת הפרעות באמצעות גישת LQR היברידית ובקרת מצבים מחליקה מסוג סופר-טוויסט
שמירה על יציבות של מכונות מעופפות קטנות
משילוח חבילות ועד חיפוש והצלה, רחפנים קטנים נדרשים לטוס בתנאים מציאותיים לא־נקיים — רוחות פתע, סוללות מתמעטות, שינויי מטען ואפילו מנועים שמתחילים להיכשל. עם זאת, רוב הרחפנים עדיין מסתמכים על מערכות בקרה שמניחות שהסביבה שקטה וניתנת לחיזוי. מאמר זה מציג שיטה חדשה לשמירה על פלטפורמת אימון בסגנון רב-סילוני יציבה ובטוחה כשהדברים משתבשים, במטרה לטיסות אמינות יותר לרובוטים אוויריים שעובדים מעל ערים, חוות ואזורים פגועים.
למה איזון של רחפן כל כך קשה
רחפוני רב-סילון הם כמו הולכי חוט מעופפים: הם חייבים לאזן באופן תמידי שלושה זוויות עיקריות — זווית סחרור (yaw), נטייה קדימה/אחורה (pitch) ולהט (roll) — באמצעות ארבעה מדחפים מסתובבים בלבד. בתיאוריה, שיטות בקרה קלאסיות יכולות לשמור עליהם יציבים כאשר התנאים תואמים את המודל המתמטי. במציאות, הרחפנים מתמודדים עם רוח, הזזת משקל, בלאי במנועים ורעש חיישנים. גישות מתקדמות יותר כמו בקרת חיזוי מודלית (MPC) ושיטות שונות של בקרת מצבי החלקה או בקרה אדפטיבית יכולות להתמודד עם חלק מהבעיות, אך לעתים קרובות דורשות חישוב כבד וכיול מסובך. המחברים שאפו למצוא דרך אמצע: בורר שיהיה חסין לתנאים רעים אך פשוט מספיק ליישום בחומרה ממשית.
"מוח" דו-שכבתי לרחפן
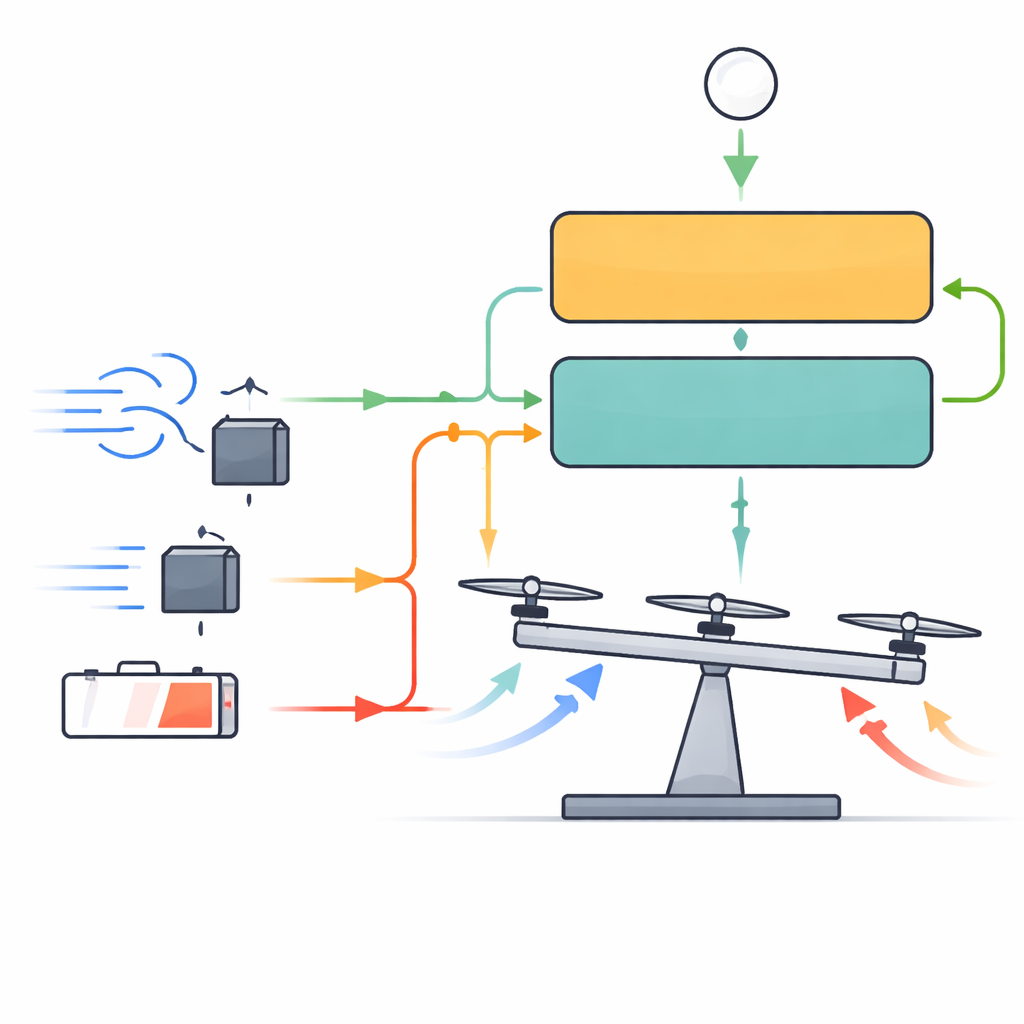
המחקר מציג סכימה היברידית בעלת שתי שכבות העובדות יחד. השכבה הפנימית משתמשת בשיטה ידועה בשם בקר ריבועי ליניארי (LQR), שמצוינת בשמירה על תפקוד חלק ויעיל אנרגטית כאשר המודל מדויק וההפרעות קלות. מסביבה הם עטפו שכבה שנייה, קשיחה יותר, המבוססת על טכניקת בקרת מצבי החלקה מסוג סופר-טוויסט. שכבה חיצונית זו עוקבת ללא הרף אחרי הסטיות מהתנועה הרצויה ומייצרת תוספת תקנון — מעין מטרה נעה — שהשכבה הפנימית עוקבת אחריה. במקום למשוך ישירות על המנועים, השכבה החסונה משנה את אות הייחוס הניתנת לבקר הפנימי, כך שהרחפן יתנהג כאילו ההפרעות נעלמו.
לאמן את הבקר להתמודד עם הבלתי צפוי
כדי להפוך את השכבה החיצונית ליעילה ככל האפשר, המחברים מכווננים אוטומטית את הפרמטרים המרכזיים שלה באמצעות שיטת אופטימיזציה מטה-הריסטית שנקראת בהומור "המפץ הגדול–התכווצות" (Big Bang–Big Crunch). בתהליך חיפוש זה נבדקים הרבה סטים של פרמטרים בסימולציה, מדורגים לפי עד כמה הם מקטינים את שגיאת המעקב לאורך זמן, ואז מכווצים לעבר האזור הטוב ביותר עד שמתקבלת קומבינציה יעילה. הבקר ההיברידי המלא נבחן על מערכת ציפה בת שלוש דרגות חופש ממערכת מעבדה מסחרית, שבה מוט עם ארבעה מדחפים יכול להסתובב בסחרור, נטייה ולהט סביב ציר. מערך זה לוכד את אתגר האיזון המהותי של רב-סילון תוך כדי שמירה על בטיחות עם עיגון למשטח.
בדיקות עומס בשמיים מדומים
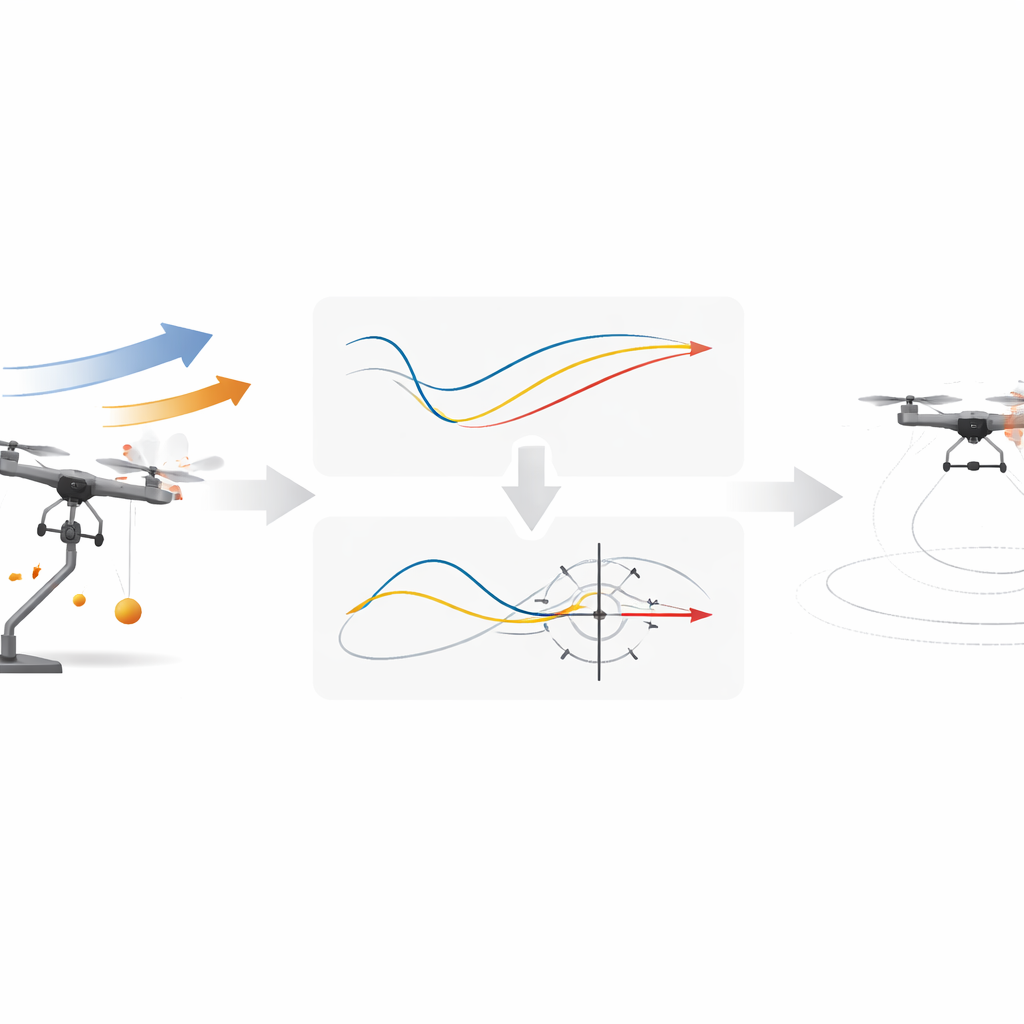
החוקרים משווים בין שלוש גישות — LQR קלאסי, בקרת חיזוי מודלית (MPC) והבורר ההיברידי החדש — על פני ארבע תרחישים תובעניים. ראשית, הם מוסיפים כוחות רוח קבועים בכל הצירים; שנית, הם מדלילים בהדרגה את דחף המנוע כדי לדמות סוללה מתרוקנת; שלישית, הם מכבים לגמרי מנוע אחד לפרק זמן קצר; ורביעית, הם משליכים מטען כבד באמצע הטיסה, ומשנים בפתאומיות את המסה והאיזון של המערכת. עבור כל מקרה הם מודדים מספר מדדי שגיאה המתארים עד כמה הסטיות גדולות, כמה הן נמשכות וכמה מהר המערכת מתייצבת מחדש. בנוסף, הם משחזרים את התנועה התלת־ממדית של קצה מדחף כדי לראות במרחב עד כמה כל בקר מסוגל לצמצם את התנועה.
מה מראים התוצאות
בכל התרחישים, הבקר ההיברידי לא רק שומר על הפלטפורמה יציבה אלא גם מקטין את שגיאות המעקב בסדרי גודל בהשוואה גם ל-LQR וגם ל-MPC. בעוד שבקר החיזוי לעתים מגיב מהר יותר בתחילה, הוא נוטה לסטות או להיתקל בקשיים כאשר המודל הבסיסי כבר לא תואם את המציאות — למשל לאחר נפילת מטען או כאשר מאפייני הדחף משתנים. הסכמה ההיברידית, בניגוד לכך, מתעלמת מהבדלים אלה: השכבה החסונה מפצה על השפעות ההפרעות והשינויים בפרמטרים, ומאפשרת לשכבה הפנימית לבצע את עבודתה הטובה ביותר. מסלולי המדחפים המשוחזרים מאשרים זאת בעין: התנועה תחת הבקר ההיברידי נשארת בתוך מעטפת צפופה, מה שמעיד על תנודות קטנות יותר ויציבות מעשית טובה יותר.
מה המשמעות עבור רחפנים שימושיים
במילים פשוטות, המאמר מראה שמתן "מוח" דו-שכבתי לרחפן — חלק אחד חלק ויעיל, וחלק אחד קשוח וסופג הפרעות — יכול לשפר במידה רבה את יכולתו להישאר זקוף ולשמור על מסלול כאשר העולם מתנהג לא צפוי. מאחר שהגישה יחסית פשוטה וקלה חישובית, היא מתאימה היטב לאלקטרוניקה על־גבי הרחפן, לא רק לסימולציות. ככל שהשיטה תעבור ממערכת המעבדה לרחפנים חופשיים, היא עשויה לסייע לרובוטים אוויריים עתידיים לשאת מטענים, לשרוד תקלות פתאומיות ולפעול בבטחה רבה יותר באוויר הבלתי־צפוי שמעלינו.
ציטוט: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
מילות מפתח: בקרת רב-סילוני, טיסה חסינת תקלות, ייצוב רחפן חסון, מערכות בקרה היברידיות, הפרעות רוח ועומס