Clear Sky Science · fr
Contrôle de quadrotor tolérant aux perturbations utilisant une approche hybride LQR et super-twisting sliding mode
Maintenir les petits engins volants stables
De la livraison de colis aux opérations de recherche et sauvetage, les petits drones sont sollicités pour voler dans des conditions réelles désordonnées — rafales de vent, batteries qui s’épuisent, variations de charge, voire moteurs défaillants. Or la plupart des drones reposent encore sur des systèmes de contrôle qui supposent un environnement calme et prévisible. Cet article présente une nouvelle manière de garder une plateforme d’entraînement de type quadrotor stable et sûre lorsque les choses tournent mal, visant une plus grande fiabilité pour les futurs robots aériens opérant au-dessus des villes, des fermes et des zones sinistrées.
Pourquoi il est si difficile d’équilibrer un drone
Les drones quadrotors sont comme des funambules volants : ils doivent constamment s’équilibrer autour de trois angles principaux — lacet, tangage et roulis — en utilisant seulement quatre hélices qui tournent. En théorie, les méthodes de contrôle classiques peuvent les maintenir stables lorsque les conditions correspondent aux hypothèses mathématiques. En pratique, les drones subissent le vent, des déplacements de masse, l’usure des moteurs et du bruit capteur. Des approches plus avancées, comme le contrôle prédictif basé sur un modèle et diverses variantes du sliding mode ou du contrôle adaptatif, peuvent traiter certains de ces problèmes, mais elles exigent souvent une forte puissance de calcul et un réglage délicat. Les auteurs cherchent un compromis : un contrôleur robuste face aux mauvaises conditions, mais suffisamment simple pour être implémenté sur du matériel réel.
Un « cerveau » à deux couches pour le drone
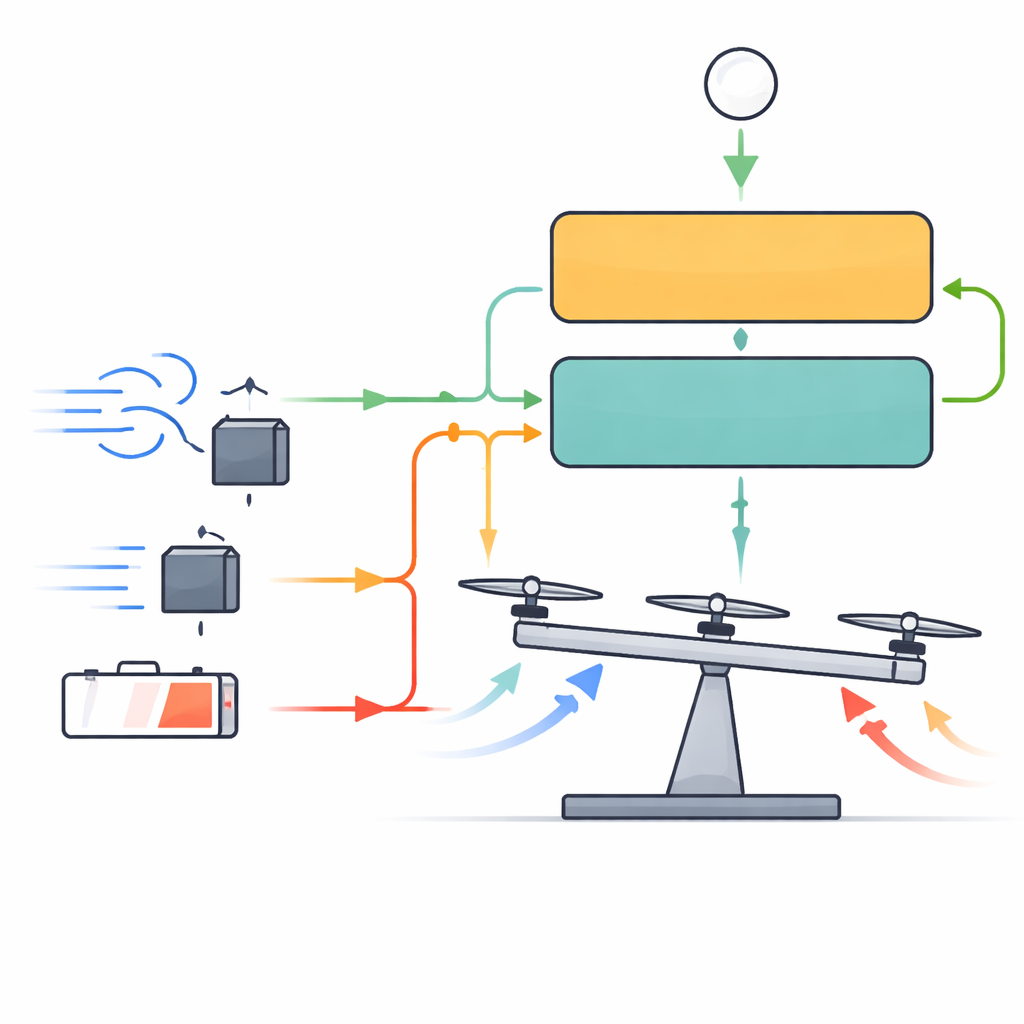
L’étude introduit un schéma de contrôle hybride composé de deux couches qui coopèrent. La couche interne utilise une méthode bien connue appelée Linear Quadratic Regulator, excellente pour maintenir le système lisse et économe en énergie lorsque le modèle est précis et que les perturbations sont faibles. Autour d’elle, les chercheurs ajoutent une seconde couche plus robuste basée sur une technique appelée super-twisting sliding mode control. Cette couche externe surveille en permanence les écarts par rapport au mouvement désiré et génère une correction — une sorte d’objectif mobile — que la couche interne suit ensuite. Plutôt que d’agir directement sur les moteurs, la couche robuste remodèle le signal de référence envoyé au contrôleur interne, de sorte que le drone se comporte comme si les perturbations avaient disparu.
Apprendre au contrôleur à gérer l’imprévu
Pour rendre la couche externe aussi efficace que possible, les auteurs règlent automatiquement ses paramètres clés à l’aide d’une méthode d’optimisation métaheuristique appelée Big Bang–Big Crunch. Dans ce processus de recherche, de nombreux jeux de paramètres candidats sont testés en simulation, évalués selon leur capacité à réduire l’erreur de suivi dans le temps, puis contractés vers la meilleure région jusqu’à trouver une combinaison efficace. Le contrôleur hybride complet est testé sur un système de maintien en vol à trois degrés de liberté issu d’un banc de laboratoire commercial, où une barre munie de quatre rotors peut pivoter en lacet, tangage et roulis autour d’un pivot. Ce montage capture le défi essentiel d’équilibrage d’un quadrotor tout en restant solidement fixé sur un établi.
Tests de résistance dans des cieux virtuels
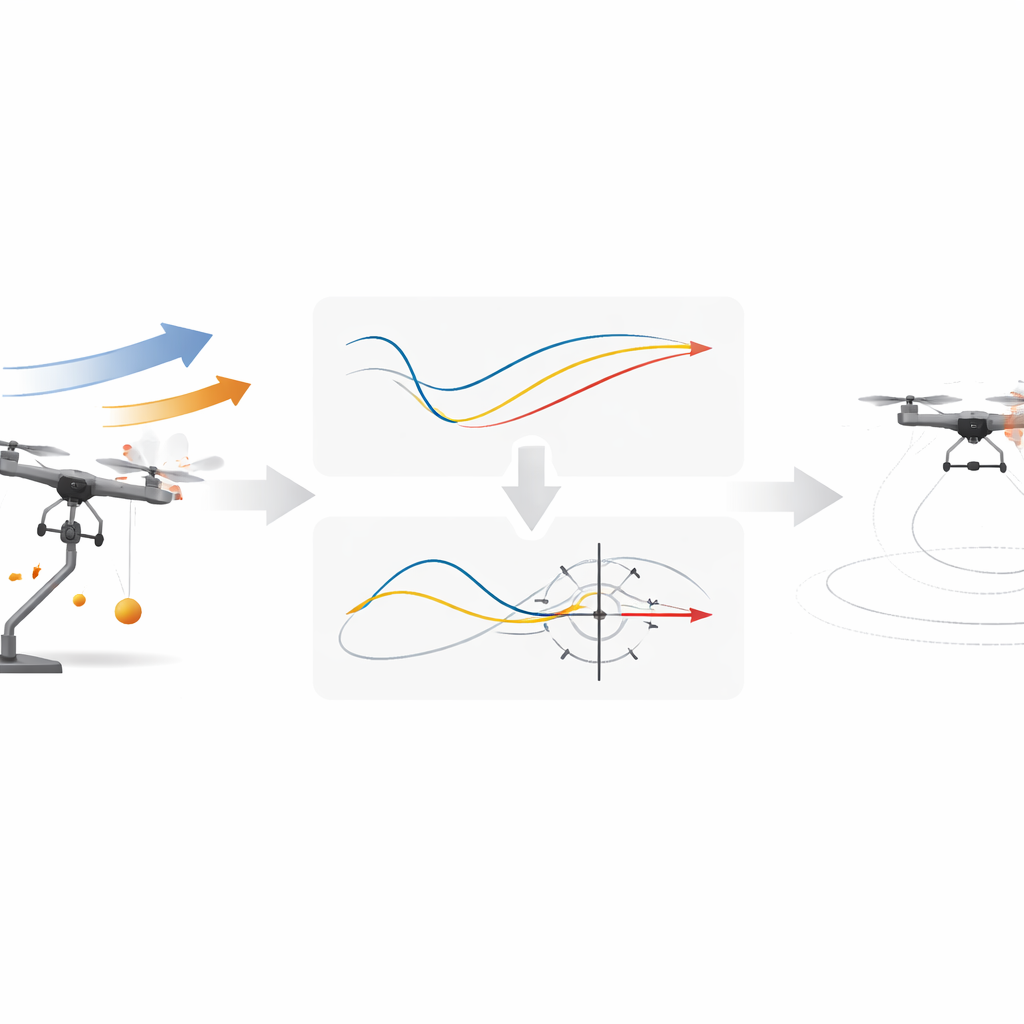
Les chercheurs comparent trois approches — LQR classique, contrôle prédictif basé sur modèle et le nouveau contrôleur hybride — sur quatre scénarios exigeants. D’abord, ils ajoutent des forces de vent constantes selon tous les axes ; ensuite, ils diminuent progressivement la poussée des moteurs pour simuler une batterie qui se décharge ; troisièmement, ils coupent complètement un moteur pendant un court instant ; et quatrièmement, ils laissent tomber une charge lourde en vol, changeant soudainement la masse et l’équilibre du système. Pour chaque cas, ils mesurent plusieurs indices d’erreur qui captent l’amplitude des écarts, leur durée et la rapidité de rétablissement. Ils reconstruisent également le mouvement tridimensionnel de la pointe d’un rotor pour observer, dans l’espace, à quel point chaque contrôleur confine le mouvement.
Ce que montrent les résultats
Dans tous les scénarios, le contrôleur hybride non seulement maintient la plateforme stable, mais réduit aussi les erreurs de suivi de plusieurs ordres de grandeur par rapport au LQR et au contrôle prédictif. Si le contrôleur prédictif réagit souvent plus vite au départ, il a tendance à dériver ou à peiner lorsque le modèle sous-jacent ne correspond plus à la réalité — par exemple après une chute de charge ou quand les caractéristiques de poussée changent. Le schéma hybride, en revanche, ignore ces décalages : la couche externe robuste annule l’effet des perturbations et des variations de paramètres, permettant à la couche interne de faire ce qu’elle sait faire de mieux. Les trajectoires reconstruites des rotors confirment visuellement cela : le mouvement sous le contrôleur hybride reste confiné dans une enveloppe serrée, indiquant des oscillations plus faibles et une meilleure stabilité pratique.
Ce que cela signifie pour les drones du quotidien
En termes simples, l’article montre que doter un drone d’un « cerveau » de contrôle à deux couches — une partie lisse et efficace, une partie robuste et tolérante aux perturbations — peut grandement améliorer sa capacité à rester droit et sur la bonne trajectoire lorsque le monde ne se comporte pas comme prévu. Parce que l’approche est relativement simple et peu gourmande en calcul, elle se prête bien à une mise en œuvre sur l’électronique embarquée réelle, pas seulement en simulation. À mesure que cette méthode passera du banc de laboratoire aux drones pleinement libres, elle pourrait aider les futurs robots aériens à transporter des charges, survivre à des pannes soudaines et fonctionner de façon plus sûre dans l’air imprévisible qui nous entoure.
Citation: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Mots-clés: contrôle de quadrotor, vol tolérant aux pannes, stabilisation robuste de drone, systèmes de contrôle hybrides, perturbations de vent et de charge