Clear Sky Science · fr
Inspection de la stabilité de l’amortissement du roulis d’un navire via une approche non perturbative
Pourquoi le roulis des navires nous concerne tous
Quand un navire roule d’un bord à l’autre en mer agitée, le mouvement peut aller de l’inconfort à des conséquences dangereuses, entraînant perte de cargaison, dégâts, voire chavirement. Cet article étudie comment et quand le roulis reste maîtrisé, en utilisant une nouvelle méthode mathématique pour décrire plus précisément le mouvement du navire. L’objectif est de fournir aux concepteurs et aux exploitants des outils plus fiables pour prévoir les conditions dangereuses et améliorer les dispositifs qui maintiennent les bâtiments à flot et protègent leur cargaison — et leurs passagers.
Comment se comporte un navire en roulis
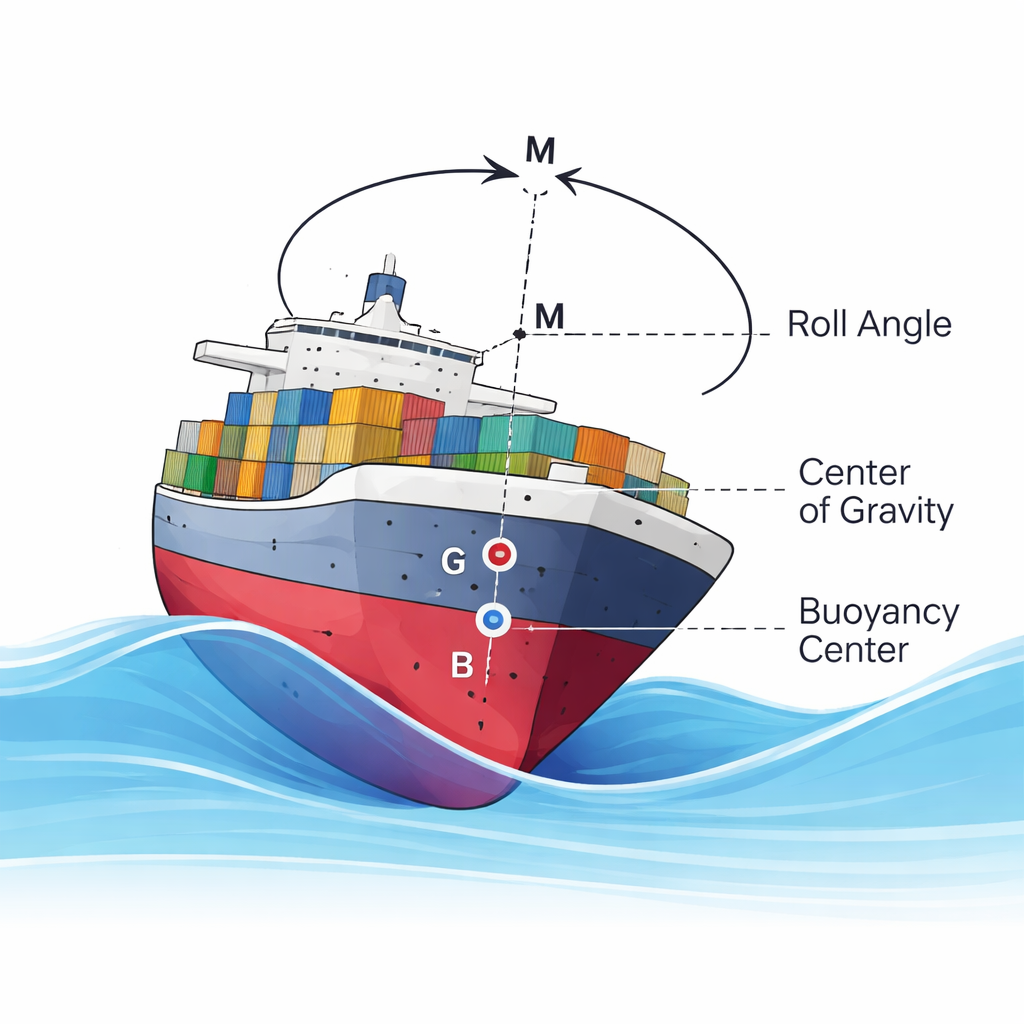
Le roulis est le basculement latéral d’un bâtiment autour de son axe longitudinal. Même par mer calme, les vagues poussent constamment les navires, et leur réponse dépend de la forme de la coque, de la répartition des masses et de l’écoulement autour de la coque. Les auteurs se concentrent sur une description simplifiée mais réaliste comportant un degré de liberté principal : l’angle de roulis. Dans ce cadre, le comportement du navire résulte de quatre éléments : l’inertie (la tendance à conserver le mouvement), les forces de rappel (la flottabilité qui ramène le navire en position verticale), l’amortissement (énergie dissipée dans les vagues et par frottement) et la poussée extérieure de la mer. À la différence des modèles de base qui supposent de faibles mouvements et des forces douces, les navires réels subissent des effets non linéaires forts pouvant provoquer des sauts brutaux de l’angle de roulis, des résonances et même des comportements chaotiques et imprévisibles.
Une nouvelle façon de maîtriser un problème complexe
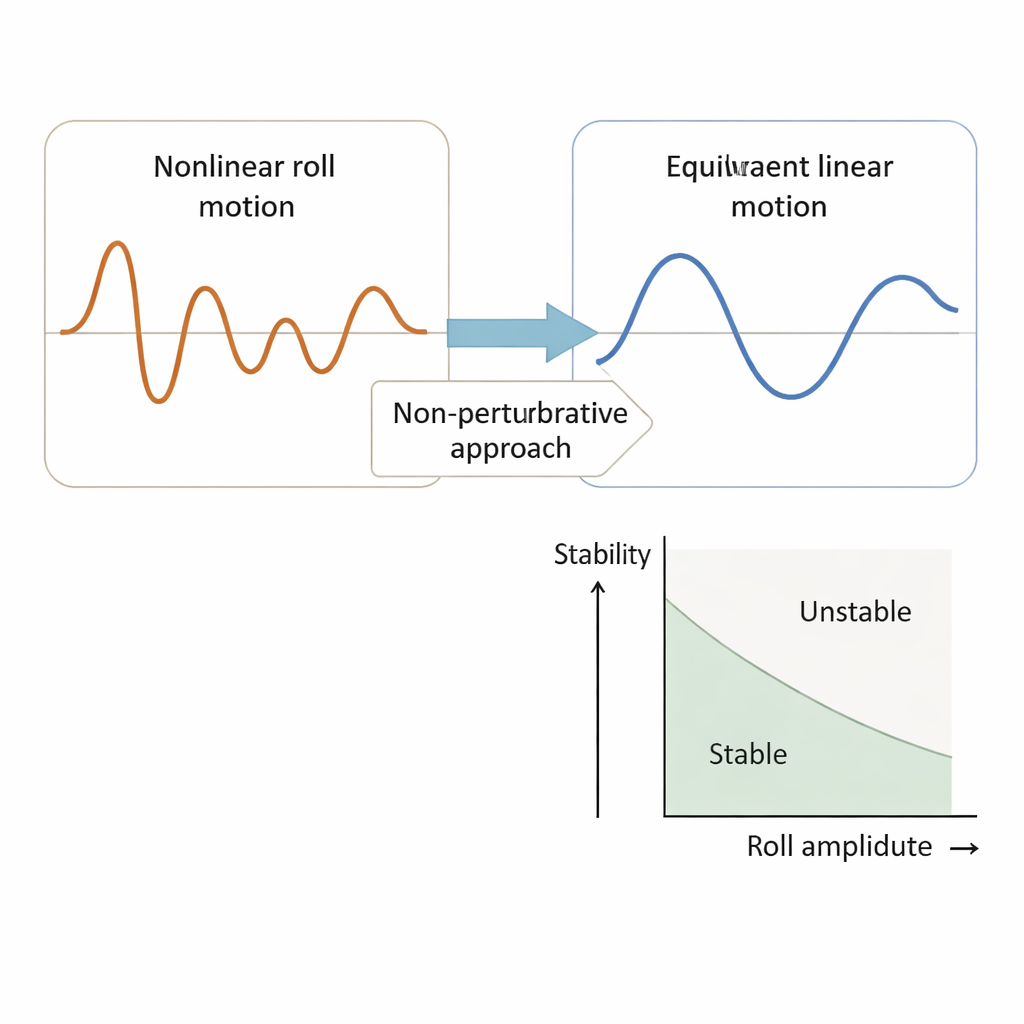
La plupart des approches traditionnelles traitent ces effets non linéaires par des techniques de perturbation, qui reposent sur le développement des équations complexes en séries et la conservation des premiers termes. Cela peut fonctionner pour de très petits mouvements, mais échoue rapidement lorsque la mer se gâte. Les auteurs adoptent une stratégie différente, appelée approche non perturbative (ANP). Plutôt que de résoudre directement l’équation non linéaire difficile, ils construisent astucieusement une équation linéaire équivalente dont le comportement suit de près le système réel sur chaque cycle de mouvement. Cela se fait en moyennant la manière dont l’énergie est stockée et dissipée au cours du temps, conduisant à des valeurs « effectives » d’amortissement et de raideur qui intègrent l’influence de tous les termes non linéaires. Des simulations numériques montrent que ce modèle linéarisé équivalent reproduit avec une précision remarquable le mouvement non linéaire original, tout en étant beaucoup plus simple à analyser.
Explorer la stabilité, la résonance et la lisière du chaos
Avec ce modèle équivalent simplifié, les auteurs examinent quand le roulis du navire reste borné et quand il devient risqué. Ils étudient comment des paramètres clés — comme la fréquence propre de roulis, différents types d’amortissement et des termes de rappel d’ordre supérieur — façonnent les zones de comportement stable et instable. L’augmentation de l’amortissement linéaire et non linéaire agrandit généralement la zone sûre, car plus d’énergie est drainée du roulis. En revanche, le renforcement de certains termes de rappel ou le déplacement de la fréquence propre peut réduire la région stable et favoriser de grands roulis soudains, surtout lorsque la sollicitation des vagues correspond quasiment au rythme naturel du bâtiment. En utilisant une technique bien connue appelée méthode des échelles de temps multiples, l’équipe déduit des formules approximatives pour l’amplitude de roulis près de la résonance et étudie comment de petites variations de la fréquence ou de l’intensité de la sollicitation peuvent déclencher de grandes réponses.
Du mouvement régulier au chaos par mer forte
L’étude va au-delà des oscillations stationnaires pour cartographier comment le système passe d’un mouvement régulier à un comportement chaotique à mesure que la sollicitation des vagues augmente. En calculant des diagrammes de bifurcation, des portraits de phase et des cartes de Poincaré — outils standards en dynamique non linéaire — les auteurs montrent que le roulis peut traverser une séquence de doublements de période avant de devenir pleinement chaotique. À faible sollicitation, le navire se stabilise dans un motif régulier et répétable avec une amplitude de roulis dominante. À mesure que l’amplitude de la sollicitation augmente, le mouvement se répète d’abord tous les deux ou quatre cycles, puis devient irrégulier et très sensible aux conditions initiales. Identifier ces seuils aide à définir des plages d’exploitation à éviter — combinaisons de vitesse, de cap ou d’état de mer — pour prévenir une amplification dangereuse du roulis.
Ce que cela signifie pour des navires plus sûrs
Pour le non-spécialiste, le message principal est que le roulis des navires n’est pas un simple va-et-vient ; c’est une interaction complexe entre la sollicitation des vagues, la forme de la coque et les mécanismes de dissipation d’énergie. L’approche non perturbative développée ici offre un raccourci pratique : elle remplace un problème non linéaire ardu par un problème linéaire finement ajusté qui conserve la physique essentielle. Il devient ainsi plus facile de prévoir quand le roulis restera modéré et quand il pourrait s’amplifier vers la résonance ou le chaos. À terme, de telles méthodes peuvent orienter de meilleures conceptions de coque, des dispositifs d’amortissement plus efficaces et des consignes opérationnelles plus claires, aidant les navires à traverser des mers agitées avec une marge de sécurité élargie.
Citation: Moatimid, G.M., Mohamed, M.A.A. & Abohamer, M.K. Inspection of stability of a general roll-damping of a ship via non-perturbative approach. Sci Rep 16, 7471 (2026). https://doi.org/10.1038/s41598-026-38505-8
Mots-clés: roulis de navire, amortissement du roulis, dynamique non linéaire, analyse de stabilité, résonance paramétrique