Clear Sky Science · es
Control de quadrotor tolerante a perturbaciones mediante un enfoque híbrido LQR y de modo deslizante super-twisting
Mantener firmes a las pequeñas máquinas voladoras
Desde la entrega de paquetes hasta el rescate, a los pequeños drones se les pide volar en condiciones reales desordenadas: ráfagas de viento, baterías que se agotan, cambios de carga e incluso motores que fallan. Aun así, la mayoría de los drones siguen dependiendo de sistemas de control que asumen un mundo tranquilo y predecible. Este artículo presenta una nueva forma de mantener estable y seguro un banco de pruebas tipo quadrotor cuando las cosas van mal, con el objetivo de lograr vuelos más fiables para futuros robots aéreos que operen sobre ciudades, explotaciones agrícolas y zonas de desastre.
Por qué es tan difícil equilibrar un dron
Los drones quadrotor son como funambulistas voladores: deben equilibrarse continuamente en torno a tres ángulos principales —guiñada, cabeceo y alabeo— usando solo cuatro hélices giratorias. En teoría, los métodos de control clásicos pueden mantenerlos estables cuando las condiciones coinciden con las ecuaciones del papel. En la práctica, los drones se enfrentan a viento, desplazamientos de masa, desgaste en los motores y ruido en los sensores. Enfoques más avanzados, como el control predictivo basado en modelo y diversas variantes del control por modo deslizante y adaptativo, pueden manejar algunos de estos problemas, pero a menudo exigen mucha potencia de cálculo y un ajuste detallado. Los autores se propusieron encontrar un punto intermedio: un controlador que sea robusto ante condiciones adversas y, a la vez, lo bastante sencillo para implementarse en hardware real.
Un "cerebro" en dos capas para el dron
El estudio introduce un esquema de control híbrido con dos capas que trabajan en conjunto. La capa interna emplea un método conocido como Regulador Cuadrático Lineal (LQR), muy eficaz para mantener el sistema suave y energéticamente eficiente cuando el modelo es preciso y las perturbaciones son leves. Alrededor de ella, los investigadores envuelven una segunda capa más robusta basada en una técnica llamada control por modo deslizante super-twisting. Esta capa externa vigila constantemente cómo se desvía el sistema del movimiento deseado y genera un desplazamiento corrector—una especie de objetivo móvil—que la capa interna a continuación sigue. En lugar de tirar directamente de los motores, la capa robusta remodela la señal de referencia que se alimenta al controlador interno, de modo que el dron se comporta como si las perturbaciones hubieran desaparecido.
Enseñar al controlador a manejar lo inesperado
Para que la capa externa sea lo más efectiva posible, los autores ajustan automáticamente sus parámetros clave usando un método de optimización metaheurístico llamado, de forma llamativa, Big Bang–Big Crunch. En este proceso de búsqueda se prueban en simulación muchos conjuntos candidatos de parámetros, se evalúan según cuánto reducen el error de seguimiento en el tiempo y luego se contraen hacia la mejor región hasta encontrar una combinación eficiente. El controlador híbrido completo se prueba en un sistema de sustentación de tres grados de libertad de un banco de pruebas comercial, donde una barra con cuatro rotores puede girar en guiñada, cabeceo y alabeo alrededor de un pivote. Esta disposición captura el reto esencial de equilibrio de un quadrotor mientras permanece asegurada a un banco de trabajo de forma segura.
Pruebas de estrés en cielos virtuales
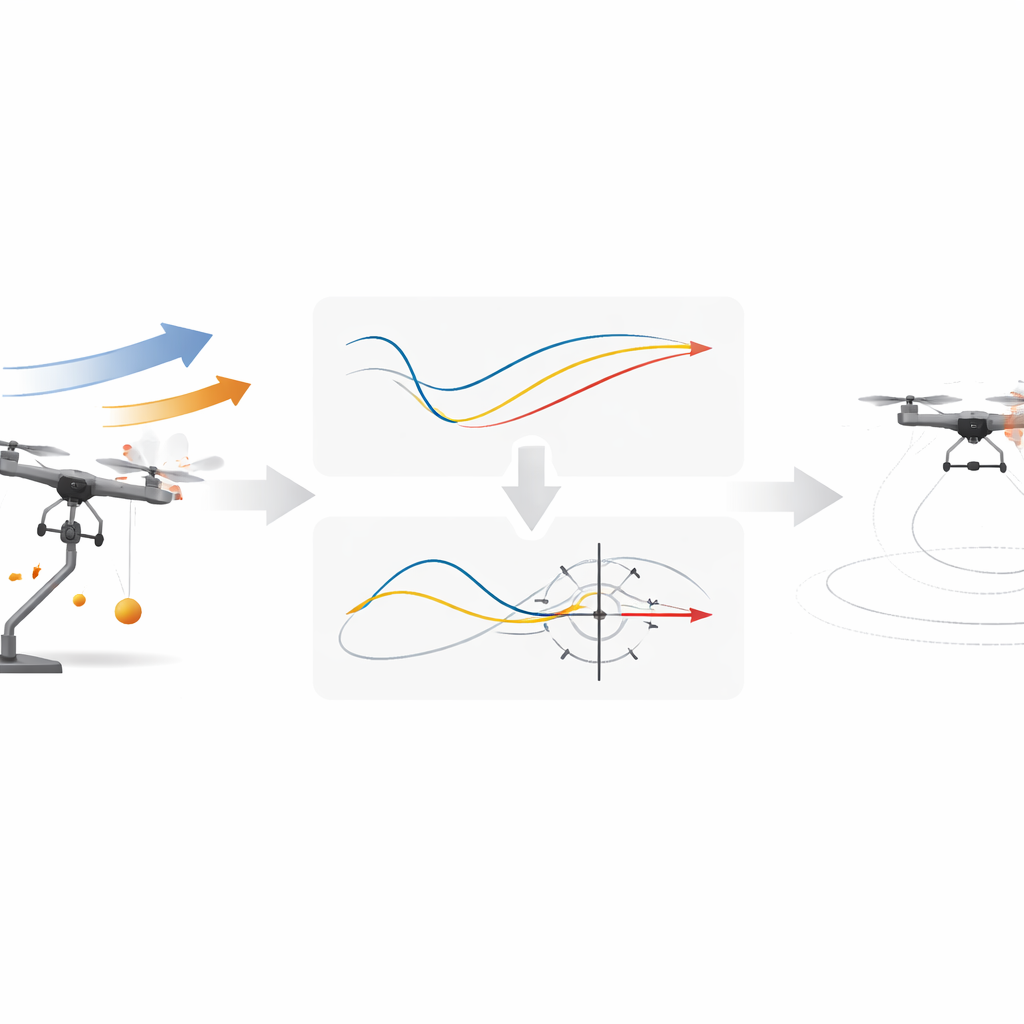
Los investigadores comparan tres enfoques —LQR clásico, control predictivo basado en modelo y el nuevo controlador híbrido— en cuatro escenarios exigentes. Primero, añaden fuerzas de viento constantes a lo largo de todos los ejes; segundo, debilitan gradualmente el empuje de los motores para imitar una batería descargándose; tercero, apagan completamente un motor durante un intervalo corto; y cuarto, dejan caer una carga pesada a mitad de vuelo, cambiando de forma abrupta la masa y el equilibrio del sistema. Para cada caso, miden varios indicadores de error que capturan la magnitud de las desviaciones, su duración y la rapidez con que el sistema se asienta nuevamente. También reconstruyen el movimiento tridimensional de la punta de un rotor para ver, en el espacio, qué tan ceñidamente cada controlador puede confinar el movimiento.
Qué muestran los resultados
En todos los escenarios, el controlador híbrido no solo mantiene la plataforma estable, sino que además reduce los errores de seguimiento por órdenes de magnitud en comparación con el LQR y el control predictivo. Aunque el controlador predictivo a menudo reacciona más rápido al principio, tiende a derivar o a tener dificultades cuando el modelo subyacente deja de coincidir con la realidad —por ejemplo, tras la caída de una carga o cuando cambian las características de empuje. El esquema híbrido, en contraste, tolera mejor estos desajustes: la capa externa robusta cancela el efecto de las perturbaciones y los cambios de parámetro, permitiendo que la capa interna haga lo que mejor sabe hacer. Las trayectorias reconstruidas de los rotores confirman esto visualmente: el movimiento bajo el controlador híbrido se mantiene dentro de un sobre cerrado y ajustado, indicando oscilaciones menores y mejor estabilidad práctica.
Qué significa esto para los drones cotidianos
En términos sencillos, el artículo muestra que dotar a un dron de un "cerebro" de control en dos capas —una parte suave y eficiente, otra dura y tolerante a perturbaciones— puede aumentar considerablemente su capacidad para mantenerse erguido y en ruta cuando el mundo no se comporta como se espera. Dado que el enfoque es relativamente simple y ligero en cálculo, es adecuado para la electrónica de a bordo real, no solo para simulaciones. Al llevar este método del banco de pruebas a drones completamente libres, podría ayudar a que los robots aéreos futuros transporten cargas, sobrevivan a fallos repentinos y operen con mayor seguridad en el aire impredecible sobre nosotros.
Cita: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Palabras clave: control de quadrotor, vuelo tolerante a fallos, estabilización robusta de drones, sistemas de control híbridos, perturbaciones por viento y carga