Clear Sky Science · en
Research on a detection method for blast rock fragments based on concavity-based pre-segmentation
Why tunnel rubble matters
Every time engineers blast a tunnel through a mountain, they leave behind a jumbled heap of broken rock. The size of these fragments has a big impact on how fast trucks can haul them away, how often crews must re-blast oversized chunks, and even whether the broken rock can be reused as construction material. Yet in the harsh, dusty environment of an active tunnel, reliably measuring the size of thousands of irregular stones is far from simple. This study introduces a new way to “see” and separate individual rocks in three dimensions, helping crews better judge how successful each blast has been and how to improve the next one. 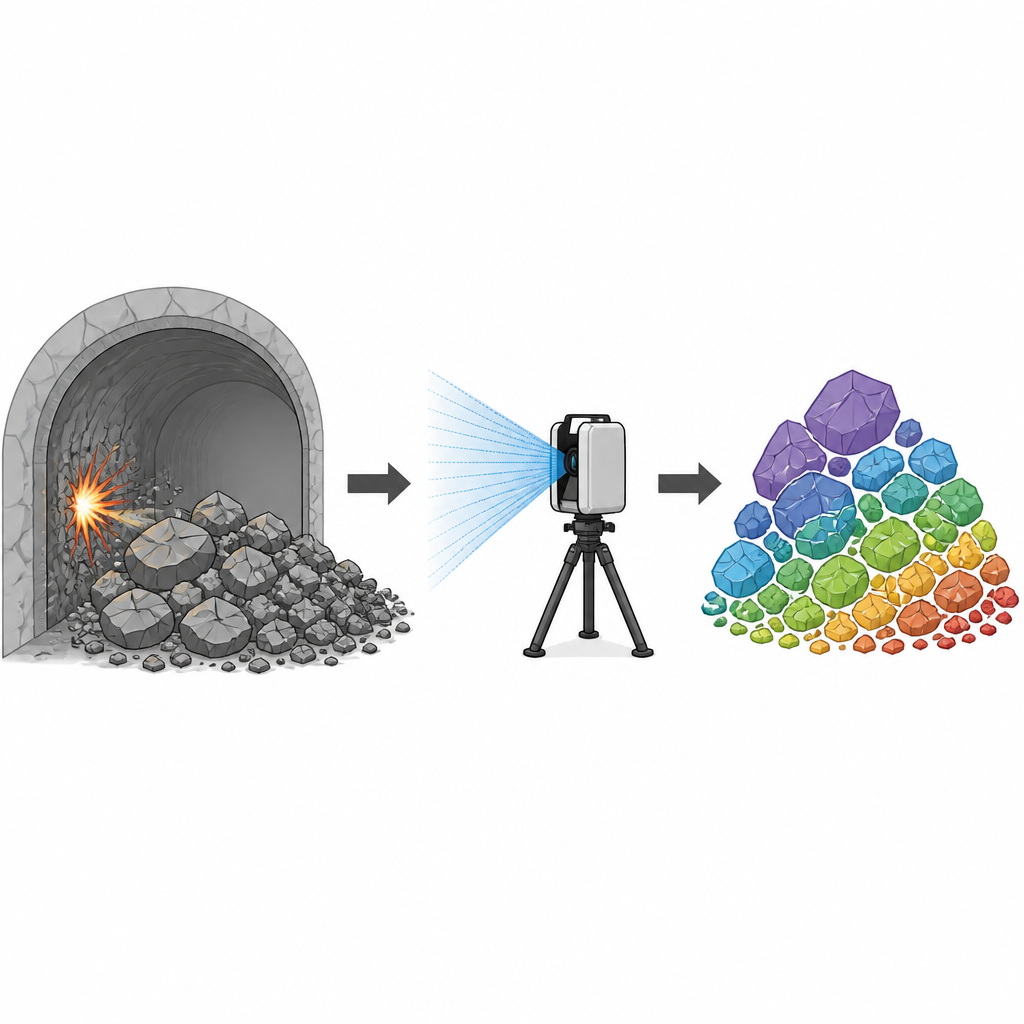
From messy piles to measurable pieces
In mountain tunnel work, drilling and blasting is still the main excavation method. After each blast, workers face a pile of rubble that must be cleared before the next round can begin. If too many large blocks remain, they require secondary crushing or even another blast, slowing progress and raising costs. At the same time, modern sustainability goals encourage finer fragmentation so that more of the broken rock can be reused instead of discarded. The distribution of fragment sizes is therefore a direct indicator of whether the blast was well designed, but traditional ways of measuring fragment size, such as hand measurements or sieve machines, are too slow and impractical for busy tunnel sites.
Why photos are not enough
Over the past decade, image-based software has become popular for estimating fragment sizes from photographs. Tools such as Split Desktop and WipFrag automatically trace apparent block boundaries by looking at color and brightness differences in 2D pictures. However, tunnel conditions are rarely camera friendly. Dust, uneven lighting, and overlapping fragments often confuse these algorithms, causing them to split one block into many pieces or lump several blocks together. Deep learning approaches that try to classify fragments pixel by pixel can be more accurate, but they need large, carefully labeled image datasets and still only see one side of each stone. They cannot recover the true three-dimensional shape and volume of the rubble.
Using laser scans and hidden hollows
To overcome these limits, the authors turned to 3D laser scanning. A tripod-mounted scanner sweeps the muck pile with laser beams and records a dense “point cloud” that captures the full surface of the fragments. The key idea of the new method is to exploit the concave gaps that naturally form where rocks press against each other. In the point cloud, these hollows appear as regions where surface directions bend inward. The researchers designed a concavity-based pre-segmentation algorithm that searches each point’s neighborhood, checks how its surface direction compares to its neighbors, and flags points that lie in such inward-bending regions. These concave points and their closest neighbors are then removed, which virtually “cuts” the pile along natural gaps between blocks. 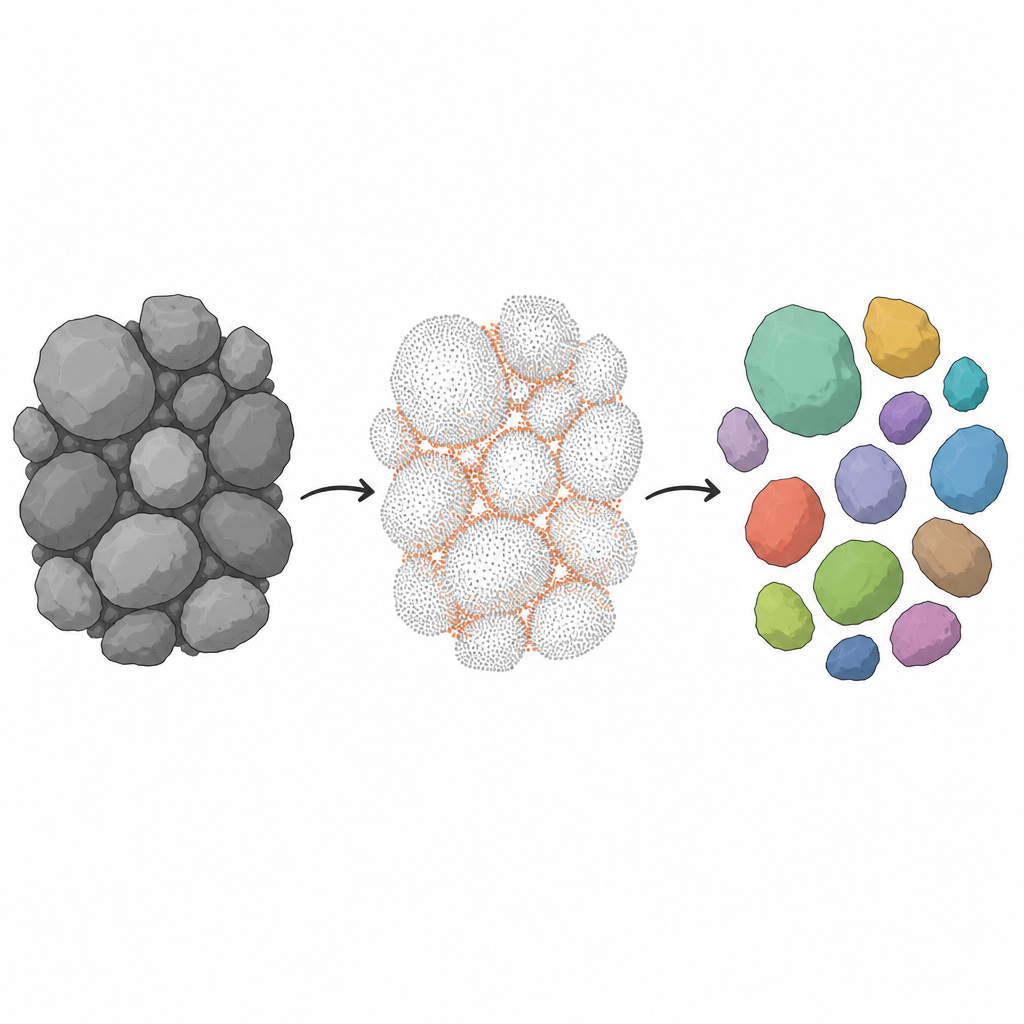
Sharpening boundaries and counting rocks
After those gap regions are cleared, the remaining points form separated clumps that largely correspond to individual rock fragments. A distance-based clustering method then groups nearby points into candidate blocks. Because the pre-segmentation removed some boundary points, the authors add a second refinement step: they estimate which points lie on the edges of each cluster and then selectively bring back compatible points from the removed concave regions, using a simple flatness check. This fills in missing edges while keeping neighboring blocks distinct. Finally, a standard geometric tool called an oriented bounding box is wrapped tightly around each fragment to estimate its three main dimensions and compile a particle size distribution for the entire muck pile.
Real tunnel tests and comparisons
The team tested their approach on blast rubble from the Xianyue Mountain Tunnel in China, using a commercial 3D laser scanner under normal construction constraints. On this real-world data, the method correctly segmented more than 80 percent of large fragments thicker than about 30 centimeters, with a false detection rate under 20 percent. Under- and over-splitting were mainly linked to scanner limits, such as coarse sampling at certain angles or small stones hiding concave gaps between bigger blocks. The researchers also compared their method to four commonly used 3D point cloud algorithms, including basic distance clustering, clustering with surface-direction checks, region growing, and a popular supervoxel-based technique. All four alternatives struggled with either splitting large rocks into many pieces or merging separate ones, especially when fragment sizes varied widely.
What this means for tunnel work
In simple terms, the study shows that by first carving away the natural hollows between touching stones, engineers can more reliably tell one rock from another in a 3D scan. This concavity-based pre-segmentation, followed by improved clustering, yields more trustworthy counts and size estimates for blast fragments directly in the tunnel. While further work is needed to speed up computation and handle very complex piles, the method already offers a practical way to check how well a blast performed and to fine-tune future blasts. Better knowledge of rock fragment sizes can shorten mucking time, reduce rework, and support smarter reuse of excavated material, all of which matter for safer, faster, and more sustainable underground construction.
Citation: Xiao, Y., Lei, M., Jia, C. et al. Research on a detection method for blast rock fragments based on concavity-based pre-segmentation. Sci Rep 16, 14935 (2026). https://doi.org/10.1038/s41598-026-38799-8
Keywords: tunnel blasting, rock fragments, 3D laser scanning, point cloud segmentation, fragment size distribution