Clear Sky Science · de
Störungsresistente Quadrotorregelung durch einen hybriden LQR- und Super-Twisting-Sliding-Mode-Ansatz
Kleine Fluggeräte stabil halten
Von Paketzustellung bis zu Such- und Rettungseinsätzen werden kleine Drohnen gebeten, in unordentlichen Realbedingungen zu fliegen – böige Winde, nachlassende Batterien, wechselnde Nutzlasten, sogar ausfallende Motoren. Dennoch verlassen sich die meisten Drohnen weiterhin auf Regelsysteme, die davon ausgehen, dass die Welt ruhig und vorhersehbar ist. Diese Arbeit stellt eine neue Methode vor, um eine quadrotorähnliche Trainingsplattform stabil und sicher zu halten, wenn Probleme auftreten, mit dem Ziel, künftige Luftroboter über Städten, Feldern und in Katastrophengebieten zuverlässiger fliegen zu lassen.
Warum das Balancieren einer Drohne so schwierig ist
Quadrotor-Drohnen gleichen fliegenden Drahtseilartisten: Sie müssen sich ständig um drei Hauptwinkel – Gier, Nick und Roll – ausbalancieren und haben dafür nur vier rotierende Propeller. Theoretisch können klassische Regelungsverfahren sie stabil halten, wenn die Bedingungen der Theorie entsprechen. In der Praxis sind Drohnen jedoch Wind, Gewichtsverlagerungen, Motorverschleiß und Sensorrauschen ausgesetzt. Fortgeschrittene Ansätze wie modellprädiktive Regelung sowie verschiedene Ausprägungen von Sliding-Mode- und adaptiver Regelung können einige dieser Probleme beherrschen, verlangen aber oft hohe Rechenleistung und aufwändige Parametrierung. Die Autoren suchten einen Mittelweg: einen Regler, der robust gegen widrige Bedingungen ist und zugleich einfach genug, um auf realer Hardware umgesetzt zu werden.
Ein zweischichtiges "Gehirn" für die Drohne
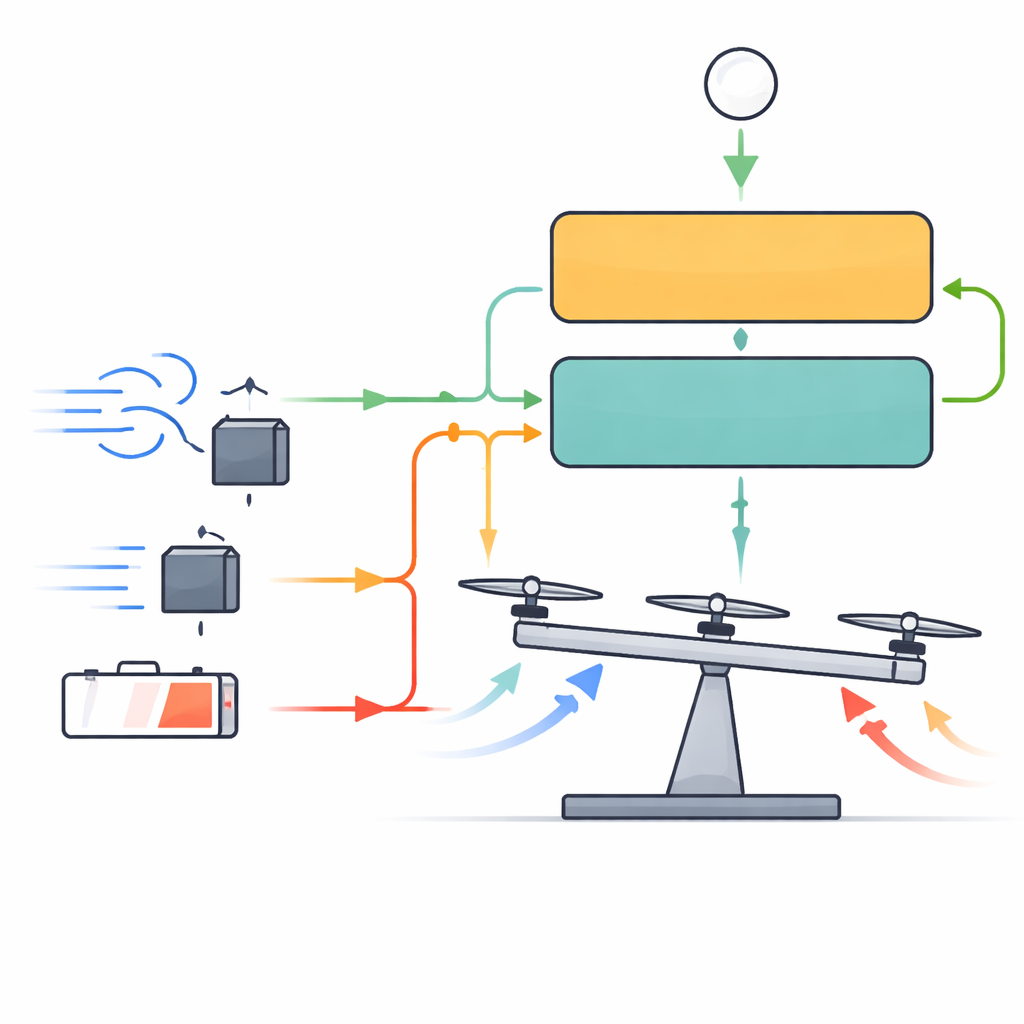
Die Studie stellt ein hybrides Regelungskonzept mit zwei zusammenarbeitenden Ebenen vor. Die innere Ebene verwendet eine bekannte Methode namens Linear Quadratic Regulator (LQR), die sehr gut darin ist, das System glatt und energieeffizient zu halten, wenn das Modell akkurat ist und Störungen schwach sind. Darum legen die Forschenden eine zweite, robustere Schicht an, basierend auf einer Technik namens Super-Twisting-Sliding-Mode-Regelung. Diese äußere Schicht überwacht fortlaufend, wie weit das System von der gewünschten Bewegung abweicht, und erzeugt eine korrigierende Verschiebung – eine Art bewegliches Ziel –, dem die innere Ebene dann folgt. Anstatt direkt an den Motoren zu zerren, formt die robuste Schicht das Referenzsignal für den Inneren um, sodass die Drohne sich so verhält, als seien die Störungen verschwunden.
Den Regler auf das Unerwartete vorbereiten
Um die äußere Schicht möglichst wirksam zu machen, stimmen die Autoren ihre Schlüsselparameter automatisch mit einer metaheuristischen Optimierungsmethode ab, die amüsanterweise Big Bang–Big Crunch heißt. In diesem Suchprozess werden viele Kandidatensätze von Parametern in der Simulation getestet, danach bewertet, wie gut sie den Regelungsfehler über die Zeit verringern, und schließlich auf die vielversprechendste Region zusammengezogen, bis eine effiziente Kombination gefunden ist. Der komplette hybride Regler wird an einem schwingungsfähigen Drei-Freiheitsgrade-Hoversystem aus einem kommerziellen Laboraufbau getestet, bei dem eine Stange mit vier Rotoren um einen Drehpunkt in Gier, Nick und Roll rotieren kann. Dieser Aufbau fängt die wesentliche Balancieraufgabe eines Quadrotors ein und bleibt dabei sicher auf einer Werkbank befestigt.
Stresstests im virtuellen Himmel
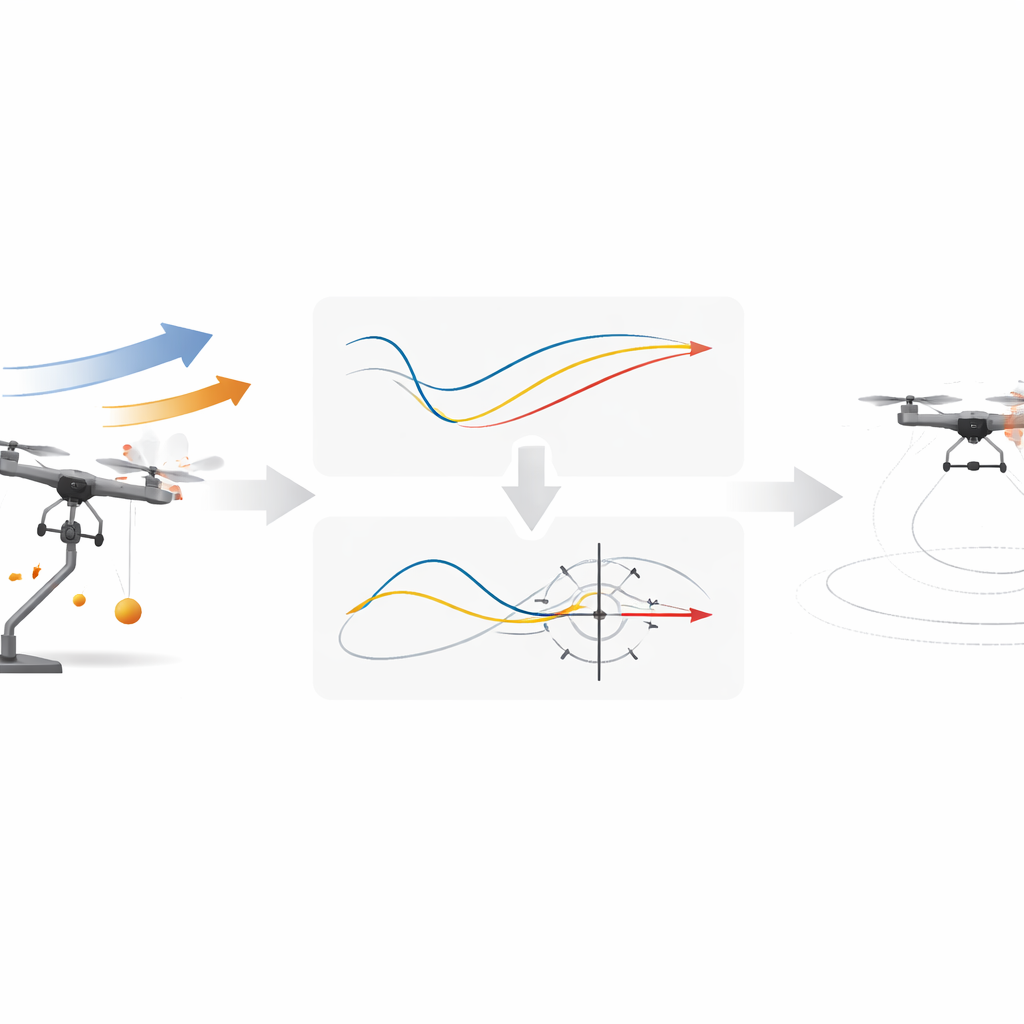
Die Forschenden vergleichen drei Ansätze – klassischen LQR, modellprädiktive Regelung und den neuen hybriden Regler – über vier anspruchsvolle Szenarien. Erstens fügen sie konstante Windkräfte in alle Achsenrichtung hinzu; zweitens schwächen sie die Motorleistung allmählich, um eine leerende Batterie zu simulieren; drittens schalten sie für ein kurzes Intervall einen Motor komplett ab; und viertens lassen sie während des Flugs eine schwere Nutzlast fallen, wodurch Masse und Balance des Systems schlagartig verändert werden. Für jeden Fall messen sie mehrere Fehlermaße, die erfassen, wie groß die Abweichungen sind, wie lange sie andauern und wie schnell sich das System wieder einpendelt. Außerdem rekonstruieren sie die dreidimensionale Bewegung einer Rotorspitze, um räumlich zu sehen, wie eng jede Regelung die Bewegung einschränkt.
Was die Ergebnisse zeigen
Über alle Szenarien hinweg hält der hybride Regler die Plattform nicht nur stabil, sondern reduziert die Regelungsfehler um Größenordnungen im Vergleich sowohl zu LQR als auch zur modellprädiktiven Regelung. Während der prädiktive Regler anfangs oft schneller reagiert, neigt er dazu, zu driften oder Probleme zu bekommen, wenn das zugrunde liegende Modell nicht mehr der Realität entspricht – etwa nach einem Nutzlastabwurf oder wenn sich die Schubcharakteristik ändert. Das hybride Konzept hingegen lässt sich von solchen Abweichungen kaum beeindrucken: Die äußere robuste Schicht hebt die Wirkung von Störungen und Parameteränderungen auf und lässt die innere Schicht ihre Stärken ausspielen. Die rekonstruierten Rotorbahnen bestätigen dies visuell: Die Bewegung unter dem hybriden Regler bleibt in einer engen Hülle eingeschlossen, was auf kleinere Schwingungen und bessere praktische Stabilität hinweist.
Was das für Alltagsdrohnen bedeutet
Einfach gesagt zeigt die Arbeit, dass ein zweischichtiges Steuerungs"gehirn" – ein Teil glatt und effizient, ein Teil robust gegenüber Störungen – die Fähigkeit einer Drohne, aufrecht und auf Kurs zu bleiben, erheblich verbessern kann, wenn die Umwelt sich unvorhersehbar verhält. Da der Ansatz relativ simpel und rechenleicht ist, eignet er sich gut für echte Bordelektronik und nicht nur für Simulationen. Wenn diese Methode vom Laboraufbau auf frei fliegende Drohnen übertragen wird, könnte sie künftigen Luftrobotern helfen, Lasten zu transportieren, plötzliche Fehler zu verkraften und in der unberechenbaren Luft über uns sicherer zu operieren.
Zitation: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
Schlüsselwörter: Quadrotor-Regelung, ausfallsicherer Flug, robuste Drohnenstabilisierung, hybride Regelsysteme, Wind- und Nutzlaststörungen