Clear Sky Science · ar
طريقة تحديد المواقع المدمجة بين BDS وeLoran من أجل تحديد موقع ودقة زمنية مرنة عند تراجع توفر الأقمار الصناعية
لماذا تهم الملاحة الاحتياطية
تعتمد حياتنا الحديثة بصمت على الملاحة الفضائية. السفن والطائرات والشبكات المالية وشبكات الطاقة كلها تعتمد على إشارات من الفضاء لمعرفة المكان والزمان بدقة. لكن هذه الإشارات ضعيفة ويمكن حجبها أو التشويش عليها أو تزويرها. يستعرض هذا المقال طريقة عملية لإضافة نسخة احتياطية قوية على الأرض، بحيث تستمر خدمات الملاحة والتوقيت بالعمل حتى عندما تتعثر الأقمار الصناعية، وهو أمر بالغ الأهمية خاصة للسفن في البحر.
طريقتان مختلفتان تمامًا لتحديد الموقع
وحدة العمل الحالية في الملاحة هي عائلة أنظمة الأقمار الصناعية المعروفة مجتمعة باسم GNSS، والتي تشمل GPS والنظام الصيني BeiDou (BDS). يحسب أجهزة الاستقبال موقعها عن طريق توقيت إشارات من أربعة أقمار على الأقل. إذا تقلّص عدد الأقمار الظاهرة بسبب التداخل أو عطل في المعدات أو العوامل الجغرافية، فإن الطريقة التقليدية تنهار ببساطة. بالمقابل، eLoran هو إصدار حديث من شبكة ملاحة راديوية قديمة تستخدم مرسلات أرضية منخفضة التردد وقوية. تنتقل إشاراتها على طول سطح الأرض ومن الصعب جدًا تشويشها، مما يجعلها مرشحًا قويًا كنظام مكمل بدلاً من بديل للأقمار الصناعية.
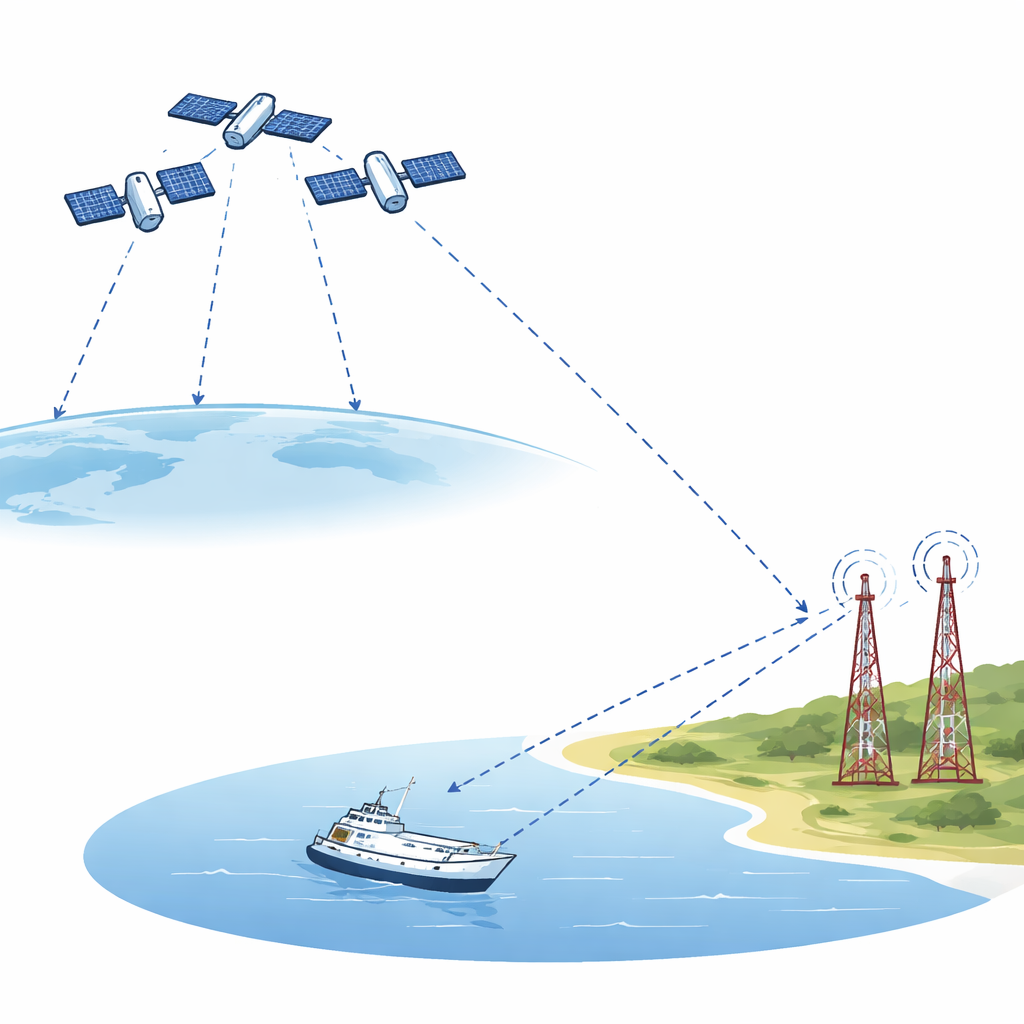
تحويل شبكة راديو قديمة إلى شريك ذكي
بمفرده، لا تكون eLoran دقيقة بما يكفي لكثير من الاستخدامات الحديثة. إذ تبطئ إشاراتها وتتغاير بفعل الغلاف الجوي والتضاريس والأراضي الساحلية، ما قد يسبب أخطاء موقع بمئات الأمتار. يوضح المؤلفون أولاً كيف يمكن استخدام قياسات من BeiDou لتنقية هذه التشويهات في موقع اختبار ثابت. من خلال مقارنة المسافة الحقيقية من المستقبِل إلى كل محطة eLoran (المستمدة من BeiDou) مع الوقت الذي تستغرقه إشارة eLoran للوصول، يقومون بتقدير التأخير الإضافي الناجم عن البيئة. ثم تُنعَم هذه تصحيحات التأخير عبر مرشح كالمان، محولة إشارة الموجة الطويلة الصاخبة إلى مصدر قياس مدى أكثر موثوقية.
مزج إشارات السماء والأرض في إطار واحد
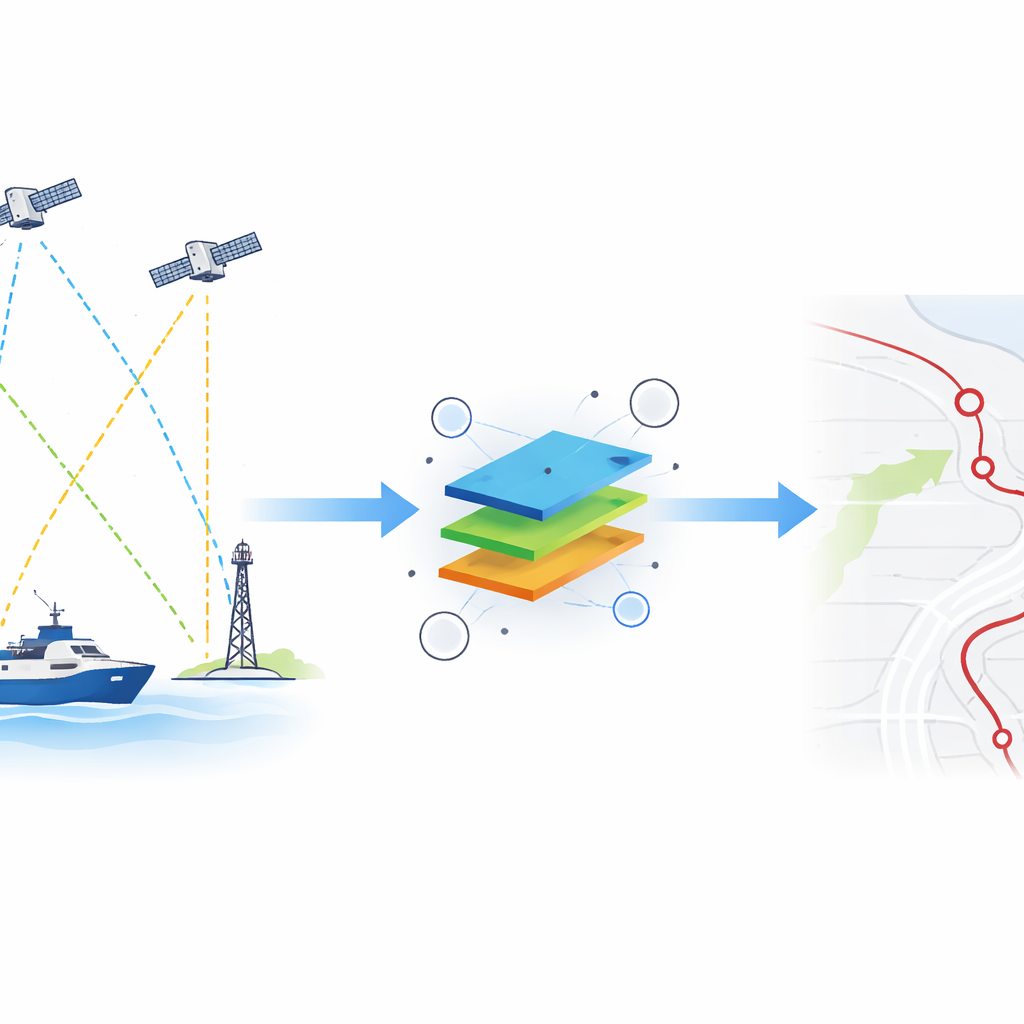
جوهر العمل هو طريقة موحدة لتحديد المواقع تُعامِل قياسات الأقمار الصناعية وقياسات eLoran معًا، بدلاً من استخدام eLoran كنسخة احتياطية بدائية فقط. صُمم خوارزمية الدمج لتستمر في العمل مع تراجع عدد الأقمار الظاهرة من أربعة أو أكثر إلى واحد. يفعل ذلك بكتابة معادلات مشتركة تربط موقع المستقبِل المجهول وزمن ساعته بكلتا مجموعتي الإشارات. ابتكار رئيسي هو مخطط وزن ديناميكي: تُمنح كل قياس تأثيرًا أكبر أو أقل اعتمادًا على هندسة الأقمار الحالية ومدى استقرار تصحيحات تأخير eLoran. عندما تكون هندسة الأقمار سيئة، أو تبدو مسارات eLoran غير مستقرة، تُخفض أوزانها تلقائيًا، مما يسمح للنظام بالتكيّف فورًا.
الاختبار على سفن حقيقية في بحار مزدحمة
اختبر الباحثون نهجهم في البحار الشرقية قبالة الصين، حيث تشكل عدة محطات eLoran شبكة إقليمية تتداخل مع تغطية BeiDou. بعد التصحيح، حققت eLoran وحدها أخطاء أفقية تقارب 19 مترًا، تحسّنًا هائلًا مقارنة بأدائها دون تصحيح. ثم درس الفريق تكوينات مختلطة: قمر صناعي واحد زائد ثلاث محطات eLoran، قمران زائد eLoran، وهكذا وصولًا إلى أربعة أقمار. مع توافر المزيد من الأقمار، تحسنت الدقة بشكل مستمر. ومع ذلك، حتى مع قمر صناعي واحد وثلاث محطات eLoran وقيود بسيطة تفترض أن المستقبِل عند مستوى سطح البحر، حقق النظام دقة أفقية تقريبية تبلغ 12 مترًا — حيث كانت حلول الأقمار الصناعية فقط ستفشل تمامًا لعدم كفاية الأقمار لحل المعادلات.
تدهور تدريجي بدلاً من فشل مفاجئ
لمحاكاة الانقطاعات الحقيقية، قام المؤلفون عمدًا بتشغيل وإيقاف الأقمار الصناعية أثناء تجارب على مواقع ثابتة وعلى سفن متحركة. لاحظوا أنه عند فقدان الأقمار، تزايدت الأخطاء لكنها بقيت ضمن عشرات الأمتار، بدلًا من التباعد الكارثي. وعندما عادت إشارات الأقمار، أعادت منظومة الدمج الاتصال بسرعة، فاستعادت دقة على مستوى الأمتار خلال نحو ثانيتين. باختصار، من خلال إعادة صياغة تراجع رؤية الأقمار الصناعية كتغير يمكن إدارته في «ما هو قابل للرصد»، بدلًا من فشل فوري، تُظهر الدراسة أن مزيجًا ذكياً من الراديو الأرضي والفضائي يمكنه إبقاء خدمات الملاحة والتوقيت تعمل بسلاسة خلال مشكلات كانت ستعطل مستقبلات GNSS التقليدية وحدها.
الاستشهاد: Li, J., Wu, H. A BDS–eLoran fusion positioning method for resilient PNT under reduced satellite availability. Sci Rep 16, 13349 (2026). https://doi.org/10.1038/s41598-026-43921-x
الكلمات المفتاحية: الملاحة المرنة, BeiDou, eLoran, نسخة احتياطية للـ GNSS, تحديد المواقع البحرية