Clear Sky Science · ar
التحكم في رباعيات المراوح المقاومة للاضطرابات باستخدام نهج هجين يجمع بين LQR ووضع انزلاقي سوبر-توستينج
الحفاظ على ثبات الطائرات الصغيرة
من توصيل الطرود إلى عمليات البحث والإنقاذ، تُطالب الطائرات الصغيرة بالطيران في ظروف واقعية فوضوية—رياح هبّابية، بطاريات تضعف، تغيرات في الحمولة، وحتى محركات تفشل. ومع ذلك تظل معظم الطائرات بدون طيار تعتمد على أنظمة تحكم تفترض أن العالم هادئ ومتوقع. تعرض هذه الورقة طريقة جديدة للحفاظ على منصة تدريب من نوع رباعي المراوح مستقرة وآمنة عندما تسوء الأمور، مع هدف تحقيق طيران أكثر موثوقية لروبوتات جوية مستقبلية تعمل فوق المدن والمزارع ومناطق الكوارث.
لماذا توازن الطائرة صعب جداً
تشبه طائرات رباعية المراوح المشاة على الحبل المشدود: عليها أن تحفظ التوازن باستمرار حول ثلاثة زوايا رئيسية—الانحراف (yaw)، والإمالة الأمامية (pitch)، والانقلاب الجانبي (roll)—باستخدام أربعة مراوح دوارة فقط. نظرياً، تستطيع طرق التحكم الكلاسيكية الحفاظ على الاستقرار عندما تتطابق الظروف مع المعادلات الرياضية. عملياً، تواجه الطائرات رياحاً، وتحولات في الوزن، وتآكل في المحركات، وضوضاء في المستشعرات. الأساليب الأكثر تقدماً مثل التحكم التنبؤي النمطي وأنماط انزلاقية وتكيّفية متنوعة يمكن أن تتعامل مع بعض هذه المشاكل، لكنها غالباً ما تتطلب حسابات مكثفة وضبطاً معقداً للمعاملات. سعى المؤلفون لإيجاد حل وسطي: متحكم يتحمل ظروف سيئة، وفي الوقت نفسه بسيط بما يكفي للتنفيذ على أجهزة حقيقية.
"مخ" ذو طبقتين للطائرة
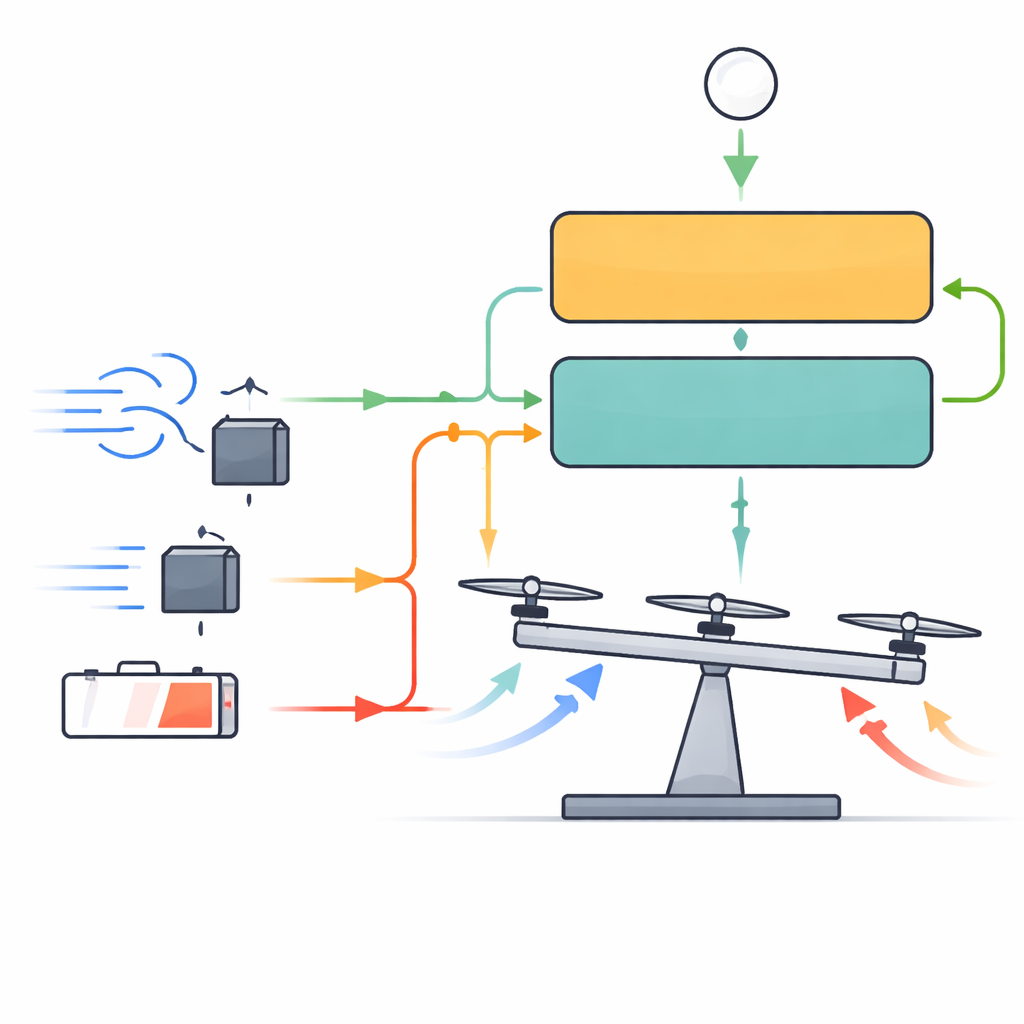
تقدم الدراسة مخطط تحكم هجين بطبقتين تعملان معاً. الطبقة الداخلية تستخدم طريقة معروفة باسم المنظم التربيعي الخطي (Linear Quadratic Regulator)، وهي جيدة جداً في الحفاظ على سلاسة النظام وكفاءة الطاقة عندما يكون النموذج دقيقاً والاضطرابات طفيفة. حولها، يلف الباحثون طبقة ثانية أكثر صلابة تعتمد تقنية تسمى التحكم الانزلاقي سوبر-توستينج. تراقب هذه الطبقة الخارجية باستمرار كيفية انحراف النظام عن الحركة المطلوبة وتولد إضافة تصحيحية—نوع من الهدف المتحرك—الذي تتبعه الطبقة الداخلية. بدلاً من سحب المحركات مباشرة، تعيد الطبقة القوية تشكيل إشارة المرجع المغذاة إلى المتحكم الداخلي، بحيث تتصرف الطائرة كأن الاضطرابات اختفت.
تدريب المتحكم على مواجهة المجهول
لجعل الطبقة الخارجية فعالة إلى أقصى حد، يقوم المؤلفون بضبط معالمها الأساسية تلقائياً باستخدام طريقة تحسين ميتا-هيوريةستية طريفة الاسم تُدعى الانفجار الكبير–الانهيار الكبير (Big Bang–Big Crunch). في عملية البحث هذه، تُجرّب مجموعات معلمات مرشحة عديدة في المحاكاة، وتُقيَّم بحسب مدى تقليلها لخطأ التتبع مع مرور الوقت، ثم تُركّز نحو أفضل منطقة حتى تعثر على تركيبة فعّالة. يُختبر المتحكم الهجين الكامل على نظام تحويم بثلاث درجات حرية من إعداد مختبري تجاري، حيث يمكن لشريط يحمل أربع مراوح أن يدور في الانحراف والإمالة والانقلاب حول محور. تلتقط هذه البنية تحدي التوازن الأساسي لرباعي المراوح مع بقاء الجهاز مثبتاً بأمان على مقعد الاختبار.
اختبار التحمل في سماء افتراضية
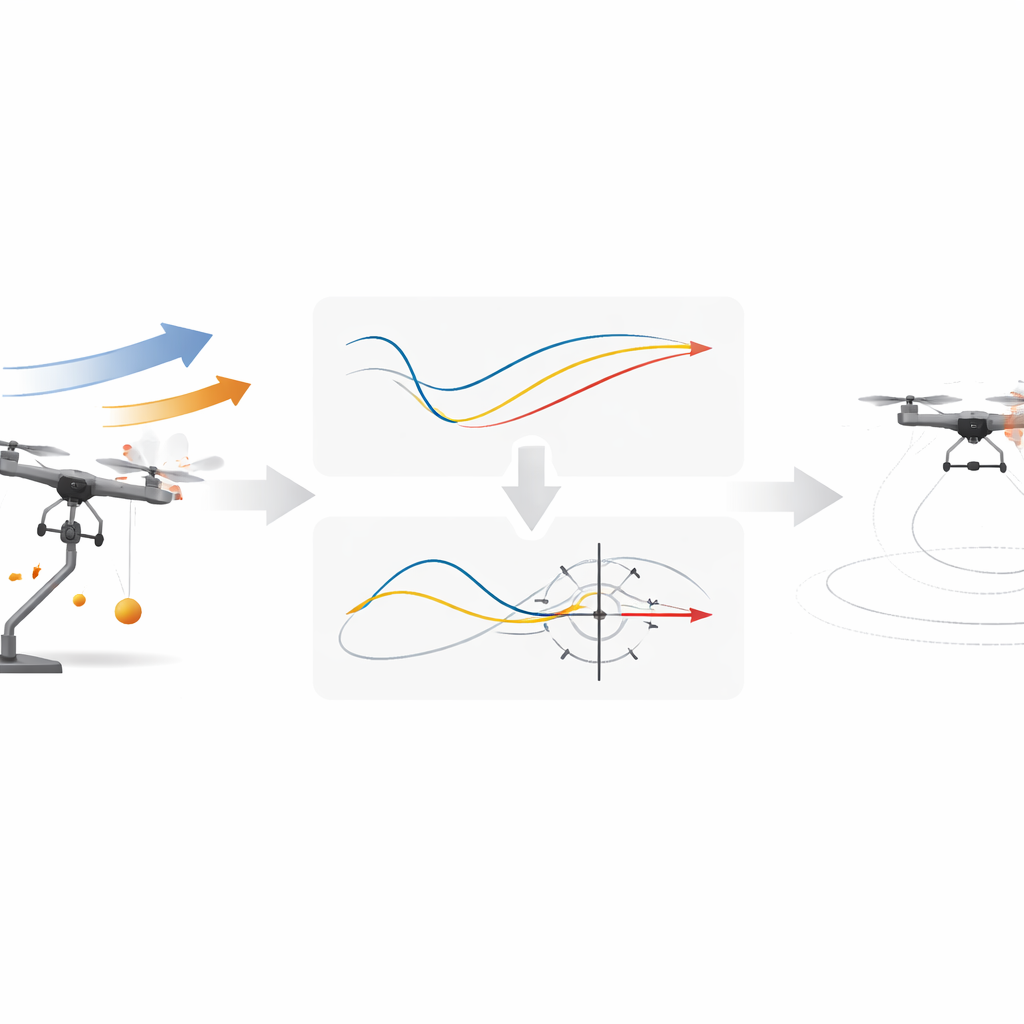
يقارن الباحثون ثلاث مقاربات—LQR الكلاسيكي، والتحكم التنبؤي النموذجي، والمتحكم الهجين الجديد—عبر أربعة سيناريوهات متطلبة. أولاً، يضيفون قوى رياح ثابتة على جميع المحاور؛ ثانياً، يضعفون دفع المحرك تدريجياً لمحاكاة تفريغ البطارية؛ ثالثاً، يوقفون أحد المحركات تماماً لفترة قصيرة؛ ورابعاً، يَسقطون حمولة ثقيلة منتصف الطيران، مما يغير فجأة كتلة النظام وتوازنه. في كل حالة، يقيسون عدة مؤشرات خطأ تلتقط مدى كبر الانحرافات، ومدة بقائها، وسرعة استقرار النظام مجدداً. كما يعيدون بناء الحركة ثلاثية الأبعاد لطرف المروحة ليروا، في الفضاء، مدى إحكام كل متحكم لاحتواء الحركة.
ماذا تظهر النتائج
عبر جميع السيناريوهات، لا يحافظ المتحكم الهجين على استقرار المنصة فحسب، بل يقلل أخطاء التتبع بشكل كبير مقارنة بكل من LQR والتحكم التنبؤي النموذجي. بينما غالباً ما يتفاعل المتحكم التنبؤي بسرعة في البداية، فإنه يميل إلى الانحراف أو المعاناة عندما لا يعود النموذج الأساسي يطابق الواقع—على سبيل المثال بعد إسقاط حمولة أو عند تغير خصائص الدفع. في المقابل، يتجاهل المخطط الهجين هذه الاختلافات: تُلغي الطبقة الخارجية القوية أثر الاضطرابات وتحولات المعاملات، مما يترك للطبقة الداخلية المجال لتؤدي عملها الأفضل. تؤكد مسارات المراوح المعاد بناؤها هذا بصرياً: الحركة تحت المتحكم الهجين تبقى محصورة في غلاف ضيق، مما يدل على اهتزازات أصغر واستقرار عملي أفضل.
ما يعنيه هذا للطائرات اليومية
بعبارات بسيطة، تُظهر الورقة أن تزويد الطائرة ب"مخ" تحكم بطبقتين—جزء ناعم وفعال، وجزء قوي يقاوم الاضطرابات—يمكن أن يعزز كثيراً قدرتها على البقاء منتصبة وعلى المسار عندما لا يتصرف العالم كما هو متوقع. وبما أن النهج بسيط نسبياً وخفيف حسابياً، فهو مناسب للإلكترونيات المحمولة على متن الطائرة، وليس للمحاكاة فحسب. ومع نقل هذه الطريقة من جهاز المختبر إلى الطائرات الطليقة، يمكن أن تساعد روبوتات جوية مستقبلية على حمل أحمال، والنجاة من أعطال مفاجئة، والعمل بأمان أكبر في الهواء غير المتوقَّع فوقنا.
الاستشهاد: Budak, S., Sungur, C. & Durdu, A. Disturbance-tolerant quadrotor control using a hybrid LQR and super-twisting sliding mode approach. Sci Rep 16, 9718 (2026). https://doi.org/10.1038/s41598-026-38820-0
الكلمات المفتاحية: التحكم في رباعيات المراوح, الطيران القابل للتحمّل عند الأخطاء, تثبيت الطائرات بدون طيار القوي, أنظمة التحكم الهجينة, الاضطرابات الناجمة عن الرياح والحمولة