Clear Sky Science · ar
ROBUST-MIPS: مجموعة بيانات مجمّعة لوضع الهيكل العظمي وتقسيم العناصر لآلات الجراحة المناظيرية
عيون أذكى على الأدوات الجراحية
تعتمد جراحة الفتحات الصغيرة على أدوات طويلة ورقيقة يوجّهها كاميرات داخل الجسم. لكي تساعد الحواسيب الجراحين — عبر تتبُّع الأدوات أو التحذير من مناطق الخطر أو حتى توجيه الكاميرات — يجب أولاً أن تعرف بدقة مكان كل أداة وكيفية توجيهها. تقدّم هذه المقالة ROBUST-MIPS، مجموعة صور كبيرة ومعلّمة بعناية تُعلّم الخوارزميات تتبُّع الأدوات الجراحية بكفاءة ودقة أكبر، ممهدة الطريق لعمليات أكثر أمانًا وآلية.
لماذا تتبع الأدوات داخل الجسم صعب
أثناء الجراحة بالحد الأدنى من التدخّل، تُظهر الكاميرا نافذة دائرية إلى مشهد مزدحم ومتغيّر: نسيج، دم، دخان، انعكاسات، والعديد من الأدوات المتداخلة. حاولت مجموعات بحثية عديدة جعل الحواسيب تفهم هذه المشاهد عن طريق تعليم كل بكسل ينتمي إلى أداة، وهي عملية تسمّى التقسيم (segmentation). رغم دقّتها، فإن هذه المخططات البكسلية المستوفية تتطلب وقتًا وجهدًا كبيرين من المعلِّمين، ولا تلتقط دائمًا المعلومات الأكثر فائدة لمعرفة أين تبدأ الأداة، ومتى تنحني، وأين تنتهي. المستطيلات البسيطة الشائعة في رؤية الحاسوب اليومية لا تنجح هنا لأن الأدوات طويلة ورقيقة، لذا يغطي الصندوق حولها مساحة كبيرة غير ذات صلة ويتداخل مع أدوات أخرى.
عرض بخطوط عصوية للأدوات الجراحية
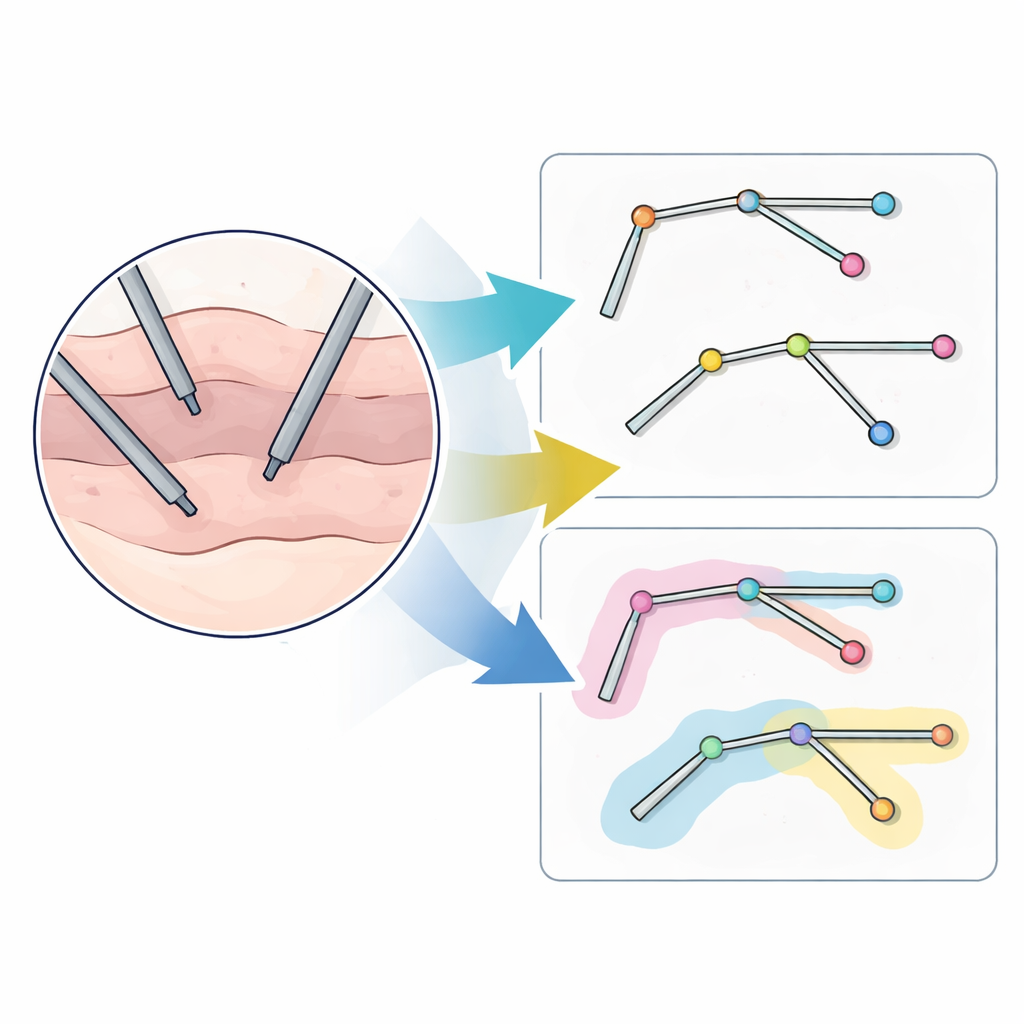
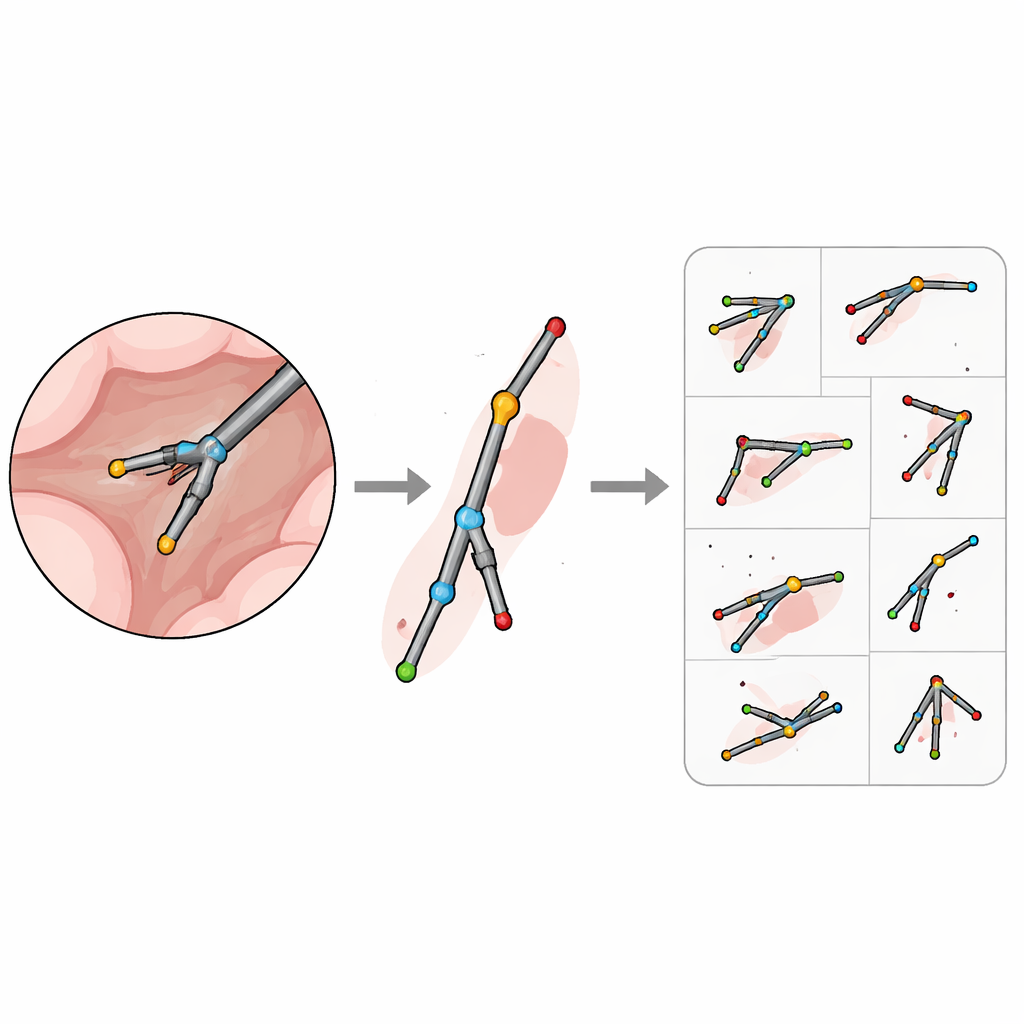
يقترح المؤلفون وجهة نظر مختلفة: بدلاً من تلوين كل بكسل، وصف كل أداة على شكل «هيكل عصي» بسيط يتكوّن من عدد قليل من النقاط الرئيسية المتصلة بخطوط مستقيمة. في مجموعة بيانات ROBUST-MIPS، تُعلَّم كل أداة في كل صورة بأربع مواقع معيارية: حيث تدخل إطار الكاميرا (نقطة الدخول)، حيث يلتقي العمود بالطرف المتحرك أو الصلب (المفصل)، وحتى إلى موضعين محتملين للطرف. يعمل هذا التصميم مع الأدوات الصلبة، مثل المجسات، والأدوات المفصلية، مثل الملاقط والمقصات. للأدوات ذات الطرف الواحد فقط، أو الأدوات التي تتداخل أطرافها أو تختفي عن المشهد، تُعلَم النقطة الزائدة على أنها مفقودة لكن تُحفظ بنفس الصيغة، بحيث ترى الخوارزميات دائمًا بنية متسقة.
التعامل مع الأجزاء المخفية والغموض
العمليات الحقيقية فوضوية، وغالبًا ما تختفي أجزاء من الأداة خلف النسيج، أو خارج نافذة الكاميرا الدائرية، أو تمامًا خارج الإطار. لمعالجة ذلك، يضيف الفريق تسمية الرؤية لكل نقطة رئيسية: مرئية بوضوح، مخفية لكن يمكن تخمينها بثقة، أو مجهولة تمامًا. على سبيل المثال، إذا كان العمود فقط مرئيًا، تُعلَم مواقع الأطراف كمفقودة؛ إذا كان الطرف خلف نسيج لكن يمكن استنتاج موقعه من العمود الظاهر وشكل الأداة، فيُعلَم كمُختَفٍ مع إحداثيات تقديرية. يسمح المؤلفون حتى للمعلّقين بوضع نقاط خارج حدود الصورة بقليل عندما يتضح أن الأداة تستمر خارج الإطار، مما يضمن بقاء «الهيكل العصي» متصلاً حتى عندما يكون جزء منه فقط مرئيًا.
بناء ومشاركة أرضية تدريب غنية
بُنيت ROBUST-MIPS على قاعدة مجموعة بيانات سابقة مستخدمة على نطاق واسع تُسمى ROBUST-MIS، التي تحتوي على 10,040 إطارًا من 30 عملية استئصال قولون مستقيم. كان كل إطار يحتوي بالفعل على أقنعة أدوات مفصّلة؛ العمل الجديد يضيف تسميات هيكلية وينقّح الأقنعة بإزالة منافذ الكاميرا الثابتة التي لا تتحرك ولا تفيد في تتبُّع الأدوات. يُرفق كل إطار بالصورة الأصلية، وقناع مُنقَّح يتضمن الأدوات الفعّالة فقط، وملف يصف النقاط الرئيسية، ووضوح رؤيتها، وكيفية اتصالها. يحوّل المؤلفون هذه المعلومات إلى صيغة معيارية شائعة طُوِّرت أصلاً لوضعية الإنسان، بحيث يمكن للعديد من الخوارزميات الحالية استخدام البيانات بجهد إضافي ضئيل.
اختبار مجموعة البيانات
لإثبات أن هذه التعليقات ليست مجرد فكرة نظرية، يدرب الفريق عدة نماذج رائدة في تقدير الوضعية — صُمِّمت أصلاً لتتبُّع مفاصل البشر — لتتبُّع الأدوات الجراحية بدلًا من ذلك. في هذا الإطار، تُعامل كل نقطة أداة كمفصل بشري. لأن طرفي العديد من الأدوات قابلان للتبادل، يخصّص المؤلفون طريقة التقييم الاعتيادية لتعامل تبادل الطرفين كأمر غير ضار، وليس خطأ. كما يتكيَّفون مع كيفية قياس الحجم بحيث تُحكم الأدوات الطويلة والرقيقة بإنصاف بغض النظر عن تدويرها في الصورة. عبر آلاف الصور غير المرئية أثناء التدريب، تحقق النماذج دقة قوية، ما يشير إلى أن مجموعة قليلة من النقاط المختارة جيدًا تكفي لتحديد المواقع بدقة حتى في وجود دخان ودم وانعكاس وتداخل الأدوات.
ماذا يعني هذا لجراحة المستقبل
تظهر ROBUST-MIPS أن تمثيل الأدوات الجراحية بمخططات هيكلية بسيطة يمكن أن يوفر معلومات عملية وغنية بتكلفة ووقت تعليمي أقل بكثير مقارنةً بالأقنعة البكسلية. من خلال نشر مجموعة البيانات، وبرمجيات الوسم المخصّصة، ونماذج المعايير الجاهزة للاستخدام، يقدّم المؤلفون للمجتمع أساسًا متينًا لبناء أنظمة أذكى تتبّع الأدوات بثبات عبر مرضى وإجراءات مختلفة. على المدى الطويل، قد تساعد هذه القدرات في تمكين تنقّل أكثر أمانًا، وفحوصات سلامة آنية، وأتمتة أكثر بديهية في غرفة العمليات.
الاستشهاد: Han, Z., Budd, C., Zhang, G. et al. ROBUST-MIPS: A Combined Skeletal Pose and Instance Segmentation Dataset for Laparoscopic Surgical Instruments. Sci Data 13, 684 (2026). https://doi.org/10.1038/s41597-026-06938-5
الكلمات المفتاحية: تتبع أدوات جراحية, الجراحة بالمنظار, تقدير الوضعية, مجموعة بيانات التصوير الطبي, الجراحة بمساعدة الحاسوب