Clear Sky Science · ar
نهج تكاملي للتوطين البصري والتخطيط اللمسي لإدراك الروبوت للأجسام بحجم الميليمتر ذات الأسطح غير المنتظمة
روبوتات ترى وتلمس
في العديد من الأماكن الخطرة — من محطات الفضاء إلى مواقع الحوادث النووية — يعتمد البشر على الروبوتات للتعامل مع مفاتيح وحبوب ومساطر وبراغي وأزرار صغيرة. لكن "عيون" الروبوت العادية كثيراً ما تفشل عندما تكون الإضاءة ضعيفة أو تكون الأشياء صغيرة وذات أسطح خشنة. تقدم هذه الورقة نظام استشعار روبوتي يجمع بين البصر واللمس، مستلهماً الطريقة التي ينظر بها الإنسان أولاً إلى جسم ثم يستكشفه بأطراف أصابعه.

لماذا لا يكفي البصر وحده
تعتمد معظم الروبوتات الحديثة على الكاميرات وأجهزة قياس العمق للتعرف على الأشياء وتحديد كيفية الحركة. تعمل هذه الأدوات البصرية جيداً في المصانع النظيفة والمضيئة جيداً، لكنّها تعاني عندما تكون المشاهد مظلمة أو مزدحمة أو مخفية جزئياً. يوضح المؤلفون أن حتى أنظمة الكاميرا القوية قد تفقد تتبع العناصر الصغيرة أو تغفل تفاصيل السطح الدقيقة، خاصة في ظروف الإضاءة المنخفضة أو الانعكاس الشديد. في مثل هذه الحالات، قد يعرف الروبوت مكان الشيء تقريباً، لكنه لا يعرف إن كان يحتوي على نتوءات دقيقة أو تجاويف أو حواف غير منتظمة ضرورية للإمساك أو الضغط بدقة.
بناء إصبع قادر على الإحساس بالتفاصيل الصغيرة
لمعالجة هذه المشكلة، بنى الباحثون حساس لمس ناعم يشبه جلد الإصبع البشري. باستخدام الطباعة النافثة للحبر، وضعوا مسارات معدنية مرنة على مادة مطاطية قابلة للتمدد، مشكلة شبكة من البكسلات الحساسة للضغط. بين الطبقات المعدنية وُضِع فيلم محكم الملمس صنع باستخدام ورق صنفرة عادي، مما يمنح الحساس بنية دقيقة وغير منتظمة تعزز حساسيته. عندما يضغط الحساس على جسم ما، يتغير الإشارة الكهربائية بحسب الضغط، مما يسمح له بكشف اللمسات الخفيفة جداً — حتى بمقاييس حجم حبة أرز صغيرة — وللتحمل لآلاف دورات الضغط والإفلات دون فقدان الأداء.
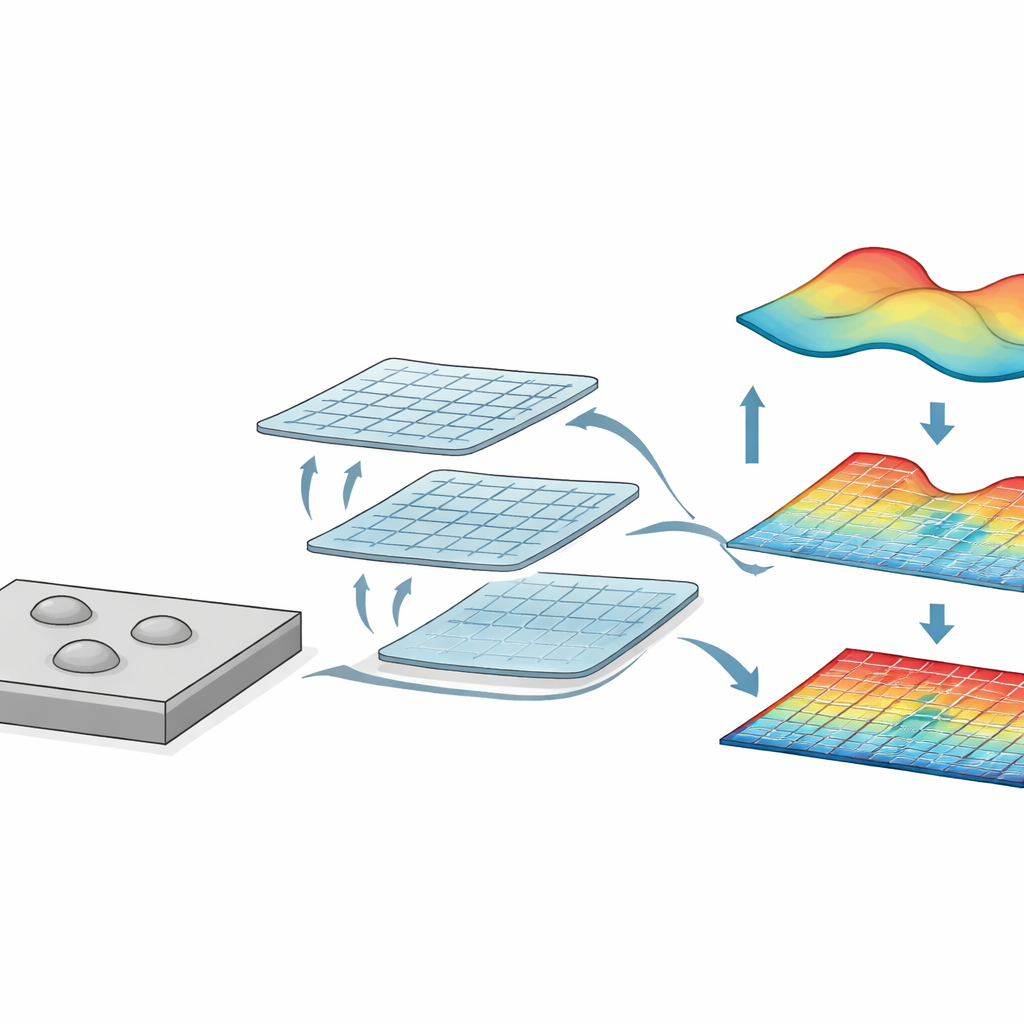
تحويل اللمس إلى خرائط شكل
ثم تم توسيع الحساس الناعم إلى مصفوفة صغيرة يمكنها التقاط أنماط الضغط عبر منطقة، تماماً مثل صورة منخفضة الدقة. عندما ضغط الفريق أجساماً على شكل حلقي أو أشكال معقدة أخرى على الحساس، كشفت خرائط الضغط الناتجة بوضوح محايدها ومناطقها المجوفة، مما يدل على أن الحساس يمكنه "رؤية" الأشكال عبر اللمس. أكدت المحاكاة الحاسوبية أن المادة الناعمة تركز الإجهاد محلياً، شبيهاً بجلد الإنسان، مما يساعدها على التقاط الفروق الدقيقة في الارتفاع والملمس على ميزات بحجم الميليمتر مثل النتوءات الصغيرة أو البروزات على السطح.
تمكين التعاون بين الرؤية واللمس
يستخدم النظام الكامل كاميرا RGB-Depth لتحديد موضع الجسم في الفضاء ووسادة لمسية ناعمة لاستكشاف سطحه. أولاً، تقدّر الكاميرا موقع الجسم وشكله العام من بعد، كما يفعل الشخص عند إلقاء نظرة سريعة على طاولة قبل الوصول. عندما تصبح المعلومات البصرية غير موثوقة — بسبب الظلال أو الانعكاس أو مشاكل التركيز — يقترب الروبوت بحساسه اللمسي من الجسم. من خلال مسح الوسادة على أجزاء مختلفة من السطح ولصق بيانات الضغط معاً، يعيد النظام بناء ملف ثلاثي الأبعاد لملامح بعرض بضعة ميليمترات فقط، مثل القباب البارزة للأقراص في عبوة المكملات أو النتوءات الصغيرة على لوحة التحكم.
ما يعنيه هذا للروبوتات المستقبلية
من خلال دمج التوطين المعتمد على الكاميرا مع التخطيط التفصيلي القائم على اللمس، يوضح هذا العمل كيف يمكن للروبوتات التعامل مع الأجسام الصغيرة وغير المنتظمة حتى عندما لا تستطيع الاعتماد بشكل كامل على "عيونها". تُظهر الدراسة أن حسّاساً مطبوعاً بسيطاً ومنخفض التكلفة يمكن أن يدعم، وعند الضرورة يحلّ محل البصر. هذا يمهد الطريق لروبوتات مستقبلية تتكيف مع الظروف المتغيرة، وتدمج الرؤية واللمس كما يفعل البشر لأداء مهام دقيقة في بيئات فوضوية أو غير متوقعة أو خطرة.
الاستشهاد: Jang, J., Park, BS., Oh, K.T. et al. Complementary visual localization and tactile mapping approach for robotic perception of millimeter-sized objects with irregular surfaces. Microsyst Nanoeng 12, 91 (2026). https://doi.org/10.1038/s41378-026-01190-8
الكلمات المفتاحية: الروبوتات الشبيهة بالبشر, الإحساس اللمسي, الإدراك متعدد الوسائط, التحكم الدقيق بالقطع الصغيرة, رؤية RGB-العمق