Clear Sky Science · zh
受脑启发的基于概率的占用栅格映射与向量符号架构
将世界视为补丁拼接的机器人
每一辆自动驾驶汽车、仓库机器人或家用吸尘器都需要对周围环境有一个快速的心智图像:哪些地方是实心的、哪些是空的、哪些仍是未知的。本文提出了一种新的方法来构建这种被称为占用栅格图的表示——它借鉴了大脑可能如何表示信息的理念,旨在在保持地图准确性的同时,使计算更快、更高效。
将原始传感器回波变成世界地图
机器人通常使用激光扫描仪或其他测距传感器在移动中探测世界,收集物体位置和空旷空间的点云。一个经典技术,称为占用栅格映射,将环境划分为微小的格子,像屏幕上的像素一样,为每个格子分配被占用的概率。传统方法将其视为一个繁重的统计问题,仔细跟踪不确定性,但消耗大量时间和内存。更新的方法借助神经网络更快且能填补空白,但它们像黑箱一样运作,在安全关键场景中难以完全信任,且通常需要为每种新环境重新训练。
受大脑启发的折中路径
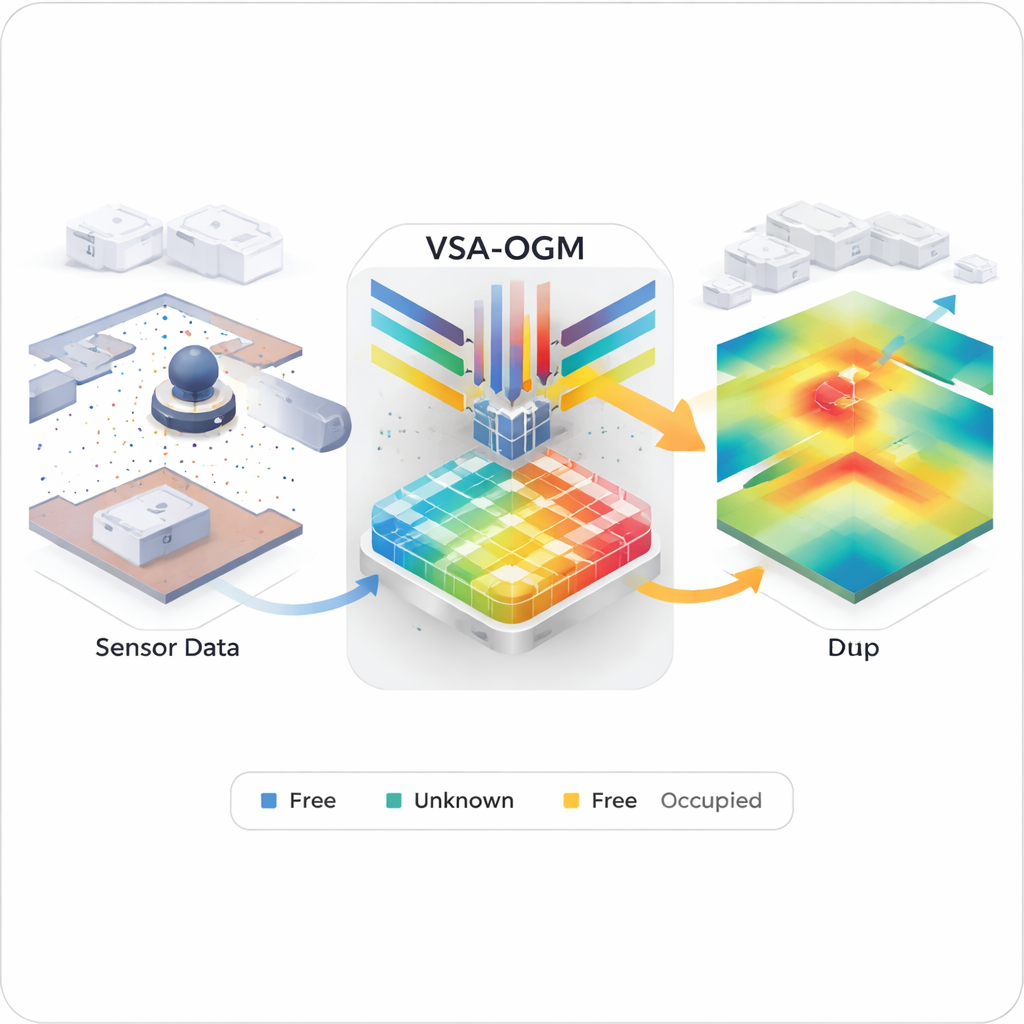
作者提出了一个“神经-符号”折中方案,称为 VSA-OGM(向量符号架构占用栅格映射)。该方法不将所有细节存储为密集栅格,也不把结构埋在数百万神经网络权重中,而是将传感器读数编码为高维空间中的超长向量——这一数学思想受到了群体神经元如何表示概念与位置的理论启发。环境被划分为若干瓦片(tiles),每个瓦片为“占用”和“空旷”证据维护向量记忆。当机器人移动并收集点云时,每次观测被转换为这些高维向量之一,并被合并到相应瓦片的记忆中,从而在时间上高效累积信息。
从嘈杂向量到清晰地图
当然,将许多信号捆绑到单一的高维记忆中会有产生嘈杂、难以读取的风险。VSA-OGM 通过精心设计的解码流程来处理这一问题。首先,它将瓦片记忆与表示空间位置的向量进行比较,产生粗略的“准概率”占用估计。随后它应用一系列非线性步骤和信息论工具(香农熵)来辨别数据在哪些地方强烈支持某一类别。最后,使用 softmax 函数将这些信号转为真实概率,并将它们组合成显示“占用”与“空旷”之间符号差异的最终地图。结果是一个在稀疏测量区域中插值平滑、同时保持完全概率性且可解释的占用栅格。
更快的单机或多机地图构建
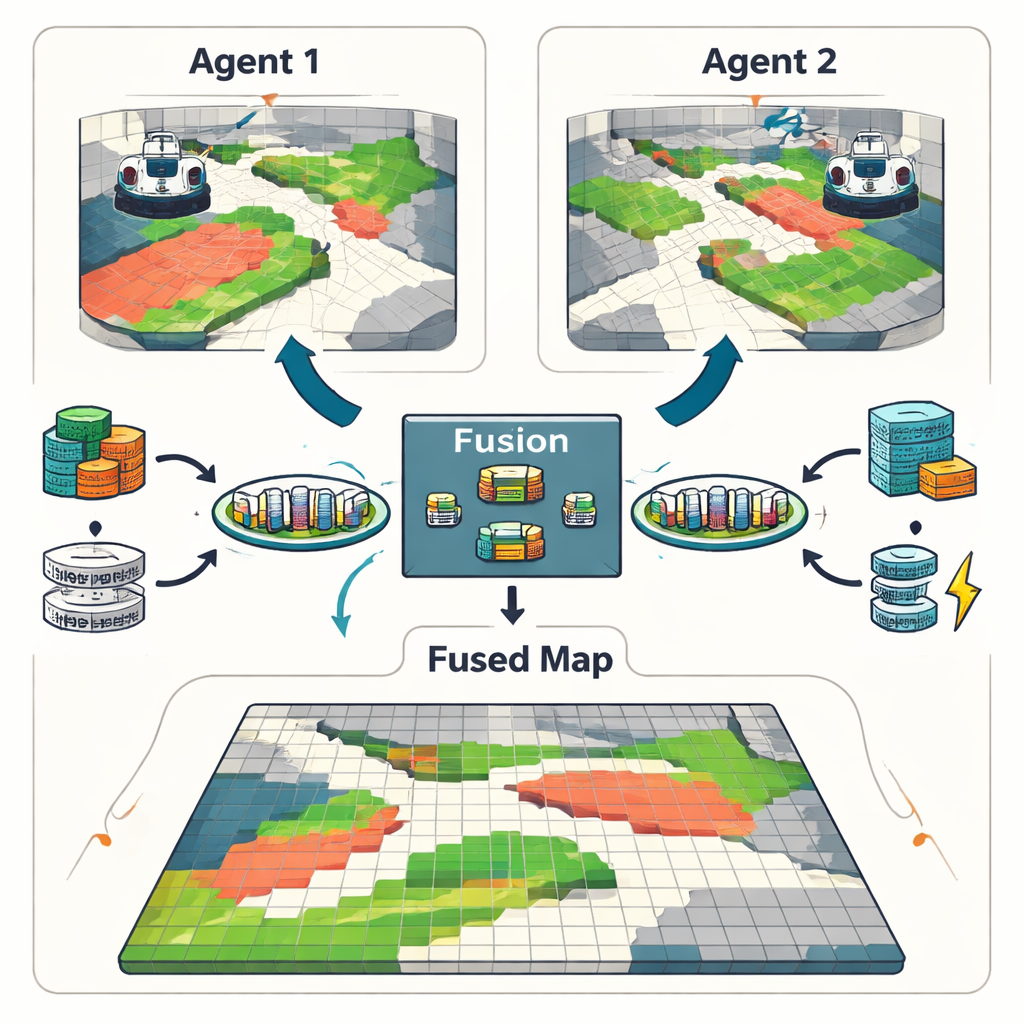
为了测试他们的方法,研究者在多个模拟和真实数据集上运行了 VSA-OGM,包括经典的室内机器人地图和大规模驾驶场景。与那些仔细建模空间相关性的强传统基线相比,VSA-OGM 达到了相似的映射精度,但使用的内存约少了 400 倍,运行速度最高快了 45 倍。与放弃部分统计细节的精简传统方法相比,它仍保持了匹配的精度,同时将延迟大约缩短了五倍。与需要数小时训练和数百万参数的神经网络系统相比,VSA-OGM 在无预训练的情况下提供了可比的映射质量,并将每帧处理时间最多减少到 1/6。该框架还支持多机器人:不同代理的向量记忆可以简单相加,从而生成融合地图且信息损失很小。
这对日常机器人意味着什么
简而言之,这项工作表明,机器人在构建世界地图时不必在慢但可信的数学方法与快速但不透明的神经网络之间二选一。通过使用受大脑启发的高维向量,VSA-OGM 保留了经典方法清晰的概率结构,同时达到了在受限硬件上实时运行所需的速度与效率。当然仍存在挑战——例如处理极度不均匀的数据和非常密集的环境——但该方法指向了未来的机器人,即使在配备有限的机载计算资源时,也能安全可靠地理解周围环境。
引用: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
关键词: 占用栅格映射, 自主机器人, 向量符号架构, 概率映射, 激光雷达感知