Clear Sky Science · zh
基于断裂的抓握:动态冲击实现可预测的机器人淡水冰锚固
在几乎无重力处攀登
想象一下试图攀爬一处冰冻峭壁,重力如此微弱以至于自身重量无法帮助靴子踩入冰面。这正是未来被派往土星卫星恩克拉多斯等冰冻天体的机器人的挑战,科学家希望在那里在深层冰口和洞穴中寻找生命迹象。本文描述了一种新方法,使机器人通过快速的锤击式冲击和牢固的夹持固定在冰上,灵感来自登山者的冰镐。其结果是一种轻量的锚固系统,比现有的冰螺或加热镐所需的力和能量少得多,可能使此前难以到达的冰冻世界变得更可达。

为什么抓住冰这么难
在地球上,攀登者可以将全部体重压在冰螺或冰镐上以咬入表面。在恩克拉多斯,重力仅约为地球的百分之一,因此机器人不能依赖自身重量将工具压入冰中。现有方案各有重大缺点。冰螺需要很大的推力才能开始咬入表面——在恩克拉多斯上,机器人可能需要像大型火星车那样的重量才能有效使用它们。加热的“热镐”可以在极小的推力下通过融化固定位置,但每次使用都消耗大量能量,这对远离太阳运行的航天器是严重限制。与此同时,许多现代攀爬机器人依赖粗糙的岩石特征、吸盘或特殊粘合剂,但这些方法在处理自然冰川冰表面那种光滑却起伏不平的形状时都表现不佳。
借鉴人类冰攀登者的技巧
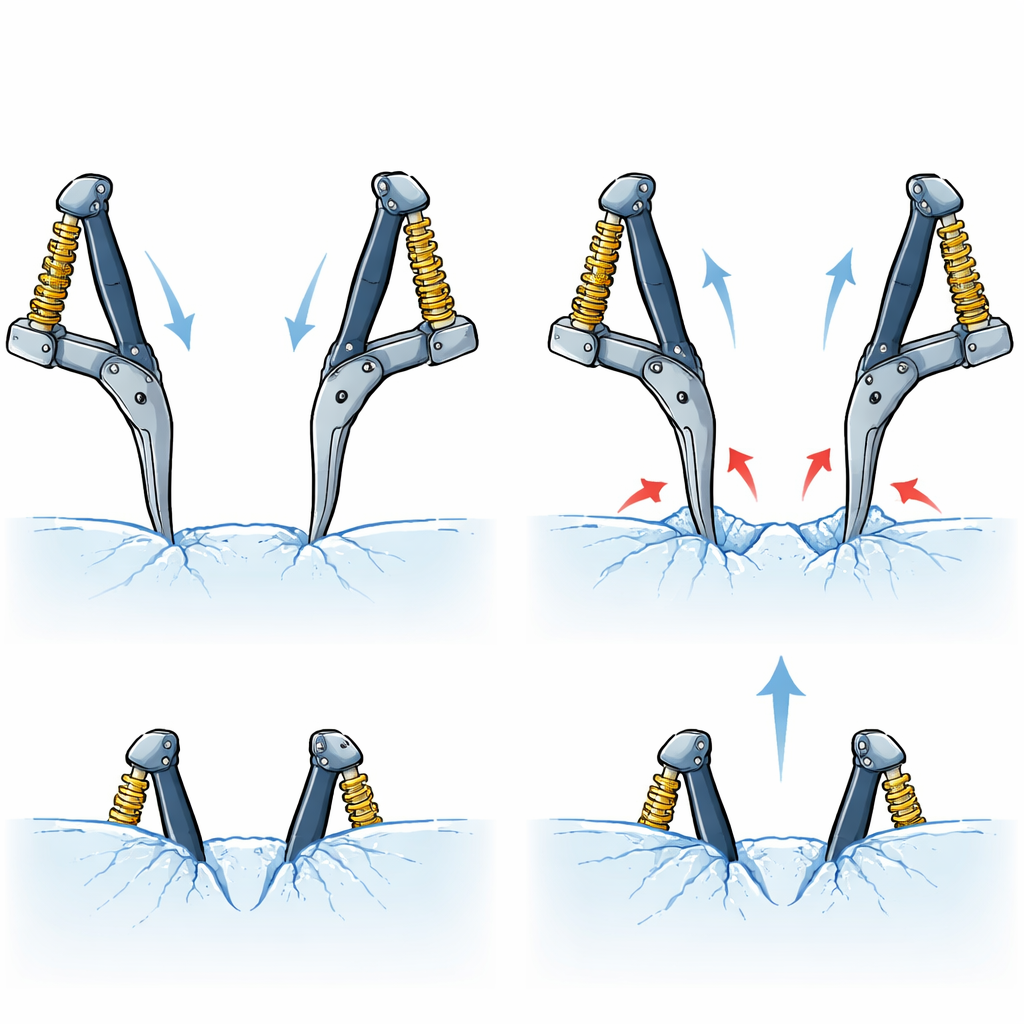
作者提出了一种不同策略:与其适应冰面,不如创造自己的抓握点。他们的装置在一个紧凑的夹持器上安装了两把小型冰镐。首先,臂内的弹簧被上紧,存储适量的机械能。释放时,冰镐像微型锤子一样摆动并击打冰面,凿出小的凹坑。接着,同一机构将冰镐向彼此挤压,使其尖端勾入新形成的凹槽。这一两步过程——冲击然后抓握——把一片光滑的冰面变成机器人能抓住的结构,并且可以轻松反向以便机器人进行下一次“踩步”。整个循环由一个电机提供动力,既给弹簧上能,又完成夹紧动作。
验证抓握物理学
为了确保该方法能可靠工作,研究团队建立了关于冰镐尖端会咬入多深以及冲击后会反弹多少的数学模型。随后他们测试了像摆锤一样摆动的单把冰镐,对着被冷却到典型冰川温度的淡水冰块进行击打。通过比较理论与实验,他们发现模型可以预测凹坑形成的深度并估算冰镐回弹的能量。利用这些结果,他们计算出机器人在摆动前必须多大推力压紧夹持器,以便冰镐保持在新凹坑中而不会被弹出。对于他们选定的弹簧能量,模型预测大约16牛的推力——相当于地球上几公升水的重量——即可几乎确保成功。
从实验台到冰川壁
有了模型指导,研究者测试了完整的双镐夹持器。在实验室中,他们确认储能约8焦耳的冲击能可以制造出足够深的凹坑,同时所需的初始推力远小于冰螺,所需能量也远小于热锚。他们随后通过直接拉扯装置离开冰面来测量最终抓握的强度。通过调节冰镐相互挤压的紧度,发现抓握会以两种方式失效:在挤压较小时,镐尖会从凹坑中滑出;在挤压过大时,冰的台阶本身会断裂。在这两者之间存在一个最佳区间,夹持器能支持超过自身重量两倍的载荷。对法国一处冰川的现场测试表明,该装置能在陡峭的天然冰面、坚实的雪和甚至树干、岩石及夯实土壤上锚固,证实冲击-抓握方法在实验室外同样有效。
这对未来探险者意味着什么
研究表明,击裂并夹持入冰可以成为机器人在严酷、低重力环境中攀爬和稳固保持的一种高效方法。通过利用断裂冰比融化冰所需能量少得多的事实,双镐夹持器用适度的力和每步仅数焦耳的能量形成牢固且可逆的锚固。对于前往恩克拉多斯或其他冰封世界的任务,这样的系统可以让体积小、能源受限的机器人安全下降到冰口或挂在峭壁上,同时采样可能揭示地球外生命存在与否的物质。同样的思路也可帮助地球上的机器人探索冰川、冰洞以及对人类攀登者而言过于危险或无法到达的脆弱岩面。
引用: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
关键词: 机器人冰攀登, 行星探索, 机器人夹持器, 冰裂缝锚固, 恩克拉多斯(Enceladus)任务