Clear Sky Science · zh
受昆虫启发的自适应行为补偿策略:针对嗅觉感官缺损的机器人气味源定位
失去传感器并不意味着丢失气味轨迹
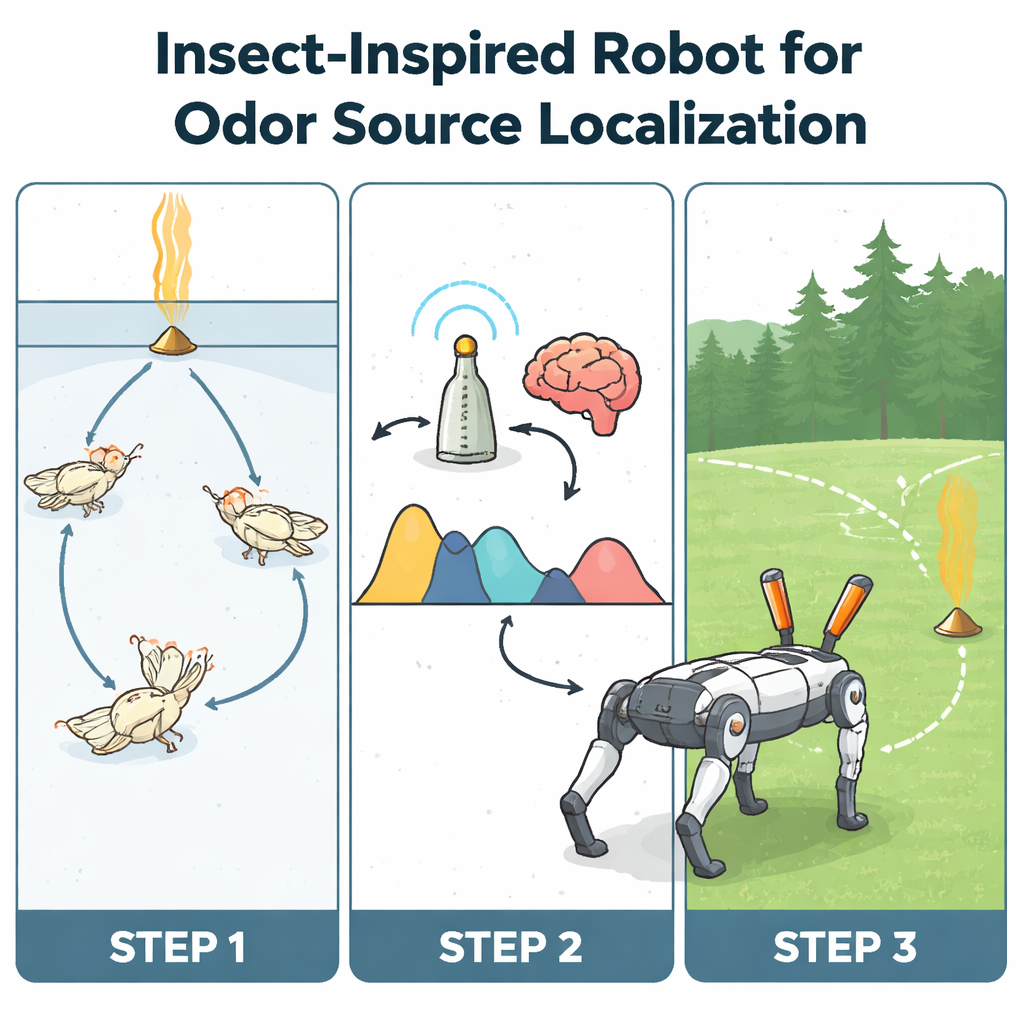
想象一下,一台搜索与救援机器人在倒塌的建筑中嗅探瓦斯泄漏或被困的幸存者——这时它的一个关键传感器损坏了。如今的机器人在此类损伤下常常表现不佳。本研究从嗅觉导航方面的一个令人惊讶的专家——家蚕雄蛾——获得启发,展示了动物在“鼻子”丢失一半后如何仍能追踪气味源,以及如何将该策略复制到四足机器人上。
嗅觉强大的微小导航者
许多动物——从昆虫到犬类——利用空气中的化学信号寻找食物、配偶或安全庇护。当视觉被黑暗、烟雾或瓦砾阻挡时,气味尤其有用。但真实的气味羽流很混乱:风向变化,建筑和树木弯曲气流,且最强的气味并不总是在源头的正上风方向。大多数嗅探机器人假设其所有气味传感器都能完好工作,且气味与风向整齐对齐。在野外,这两项假设都不成立。家蚕(Bombyx mori)为这一点提供了自然反例:雄性能在湍流空气中定位释放性信息素的雌性,而有趣的是,即便摘除其中一侧触角——其主要嗅觉器官——也能继续定位。
触角受损后蛾如何应对
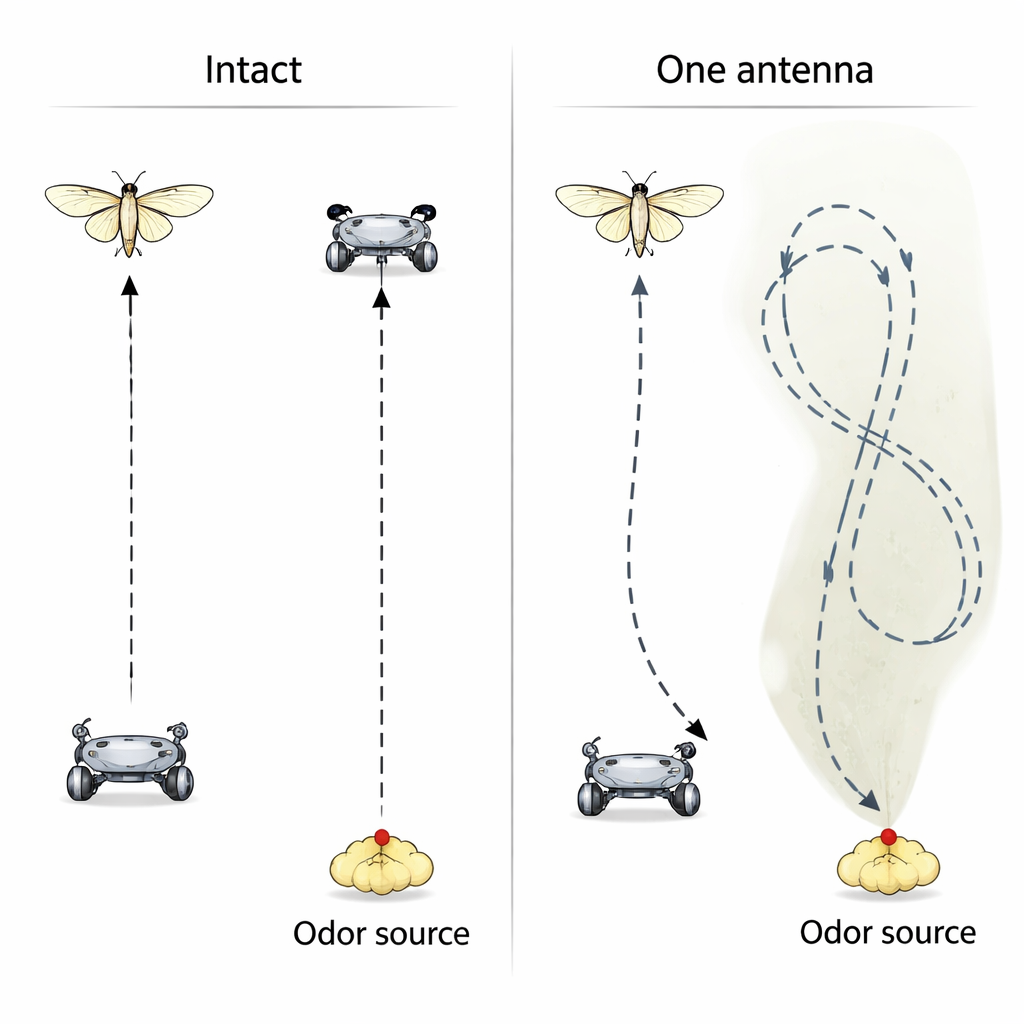
研究者首先在实验室里测试了完整的雄蛾与摘除左侧触角的雄蛾,观察它们走向气味源的能力。两组都从距信息素释放点15厘米处出发。令人惊讶的是,在一分钟内到达源点的成功率在摘除一只触角后并未显著下降。变化出现在路径上:完整蛾往往沿较直的路线前进,而单侧触角的蛾走得更慢、路径更弯,朝向剩余触角一侧弯曲。对头部运动的详细测量显示,蛾会根据气味在剩余触角上是靠近基部还是触角尖端被探测到,以及它们当前的转向方向,切换转向策略。
复杂行为背后的两个简单规则
通过反复从左侧和右侧脉冲释放气味并追踪蛾的头部角度,研究团队将行为转化为概率曲线,显示每次喷吐后蛾向左或向右转的可能性。当气味在触角靠近基部处被探测到时,蛾强烈倾向于继续向该侧旋转,实际上是承诺继续当前转向。气味在触角尖端被探测到时,选择更为平衡,略微偏向探索相反一侧。简言之,触角的丧失并未使蛾放弃;相反,它促使蛾采用一种更广泛采样两侧空间的搜索模式,尤其是在气味羽流“边缘”——气味强度急剧变化的区域。
教一台四足机器人像蛾子一样嗅闻
接着,研究者构建了一台在“头部”上装有气味传感器、并按触角从基部到尖端结构排列的四足机器人。他们设计了两种搜索算法。第一种是标准的受蛾启发的方法,称为SZL(代表突进–之字形–回环),假设两侧气味传感器均可工作,并根据左、右探测的相对时序选择其直线“突进”方向。第二种称为情境依赖受蛾启发算法(CDMI),将新的蛾类规则内嵌其中:它估计气味在剩余传感器上的检测位置,并使用从动物实验得出的概率曲线来决定移动方向和转向幅度。室内测试中,当两侧传感器完好时,SZL表现最好,路径快速且相对笔直。但当一个传感器被禁用时,CDMI明显优于SZL,通过沿着变化的气味场边缘采取类似单侧触角蛾的回环轨迹,更频繁地找到源头。
在损坏时依然保持智能的机器人
为进一步验证该思想,团队将机器人带到户外测试——自然风和湍流使气味羽流高度斑驳。他们让完整机器人运行常规的SZL算法,让“单传感器”机器人运行CDMI算法。两者的成功率相当,但使用受蛾启发自适应策略的受损机器人往往以更短、更少曲折的路径找到源点。这表明在粗糙的真实环境中,从一种精准但脆弱的感知方案切换到更具探索性、沿边缘跟踪的策略实际上可能更优。更广泛的意义在于,稳健的导航并不需要愈加复杂的人工智能;相反,简单且基于生物的规则——与传感器在机体上的布局及机体与环境的相互作用关联——能帮助制造在关键部件失效时仍能继续工作的机器人,这对于长时间的探测与救援任务至关重要。
引用: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
关键词: 嗅觉导航, 仿生机器人学, 气味源定位, 受昆虫启发的人工智能, 具身智能