Clear Sky Science · zh
具有主动掌部的触觉反应夹持器,用于灵巧操作
能感知所持物的机器人
想象一种机器人,它可以轻柔地摘下熟透的草莓、拧开儿童防护瓶盖,或在头顶拧入灯泡——所有这些都不会压坏、掉落或错位物体。本文介绍了一种新的机器人夹持器,通过赋予机器人不仅智能的指端,还包括一个主动且高度灵敏的掌部,使机器更接近那种谨慎、类似人手的操控技巧。
不仅仅是用来托住东西的掌部
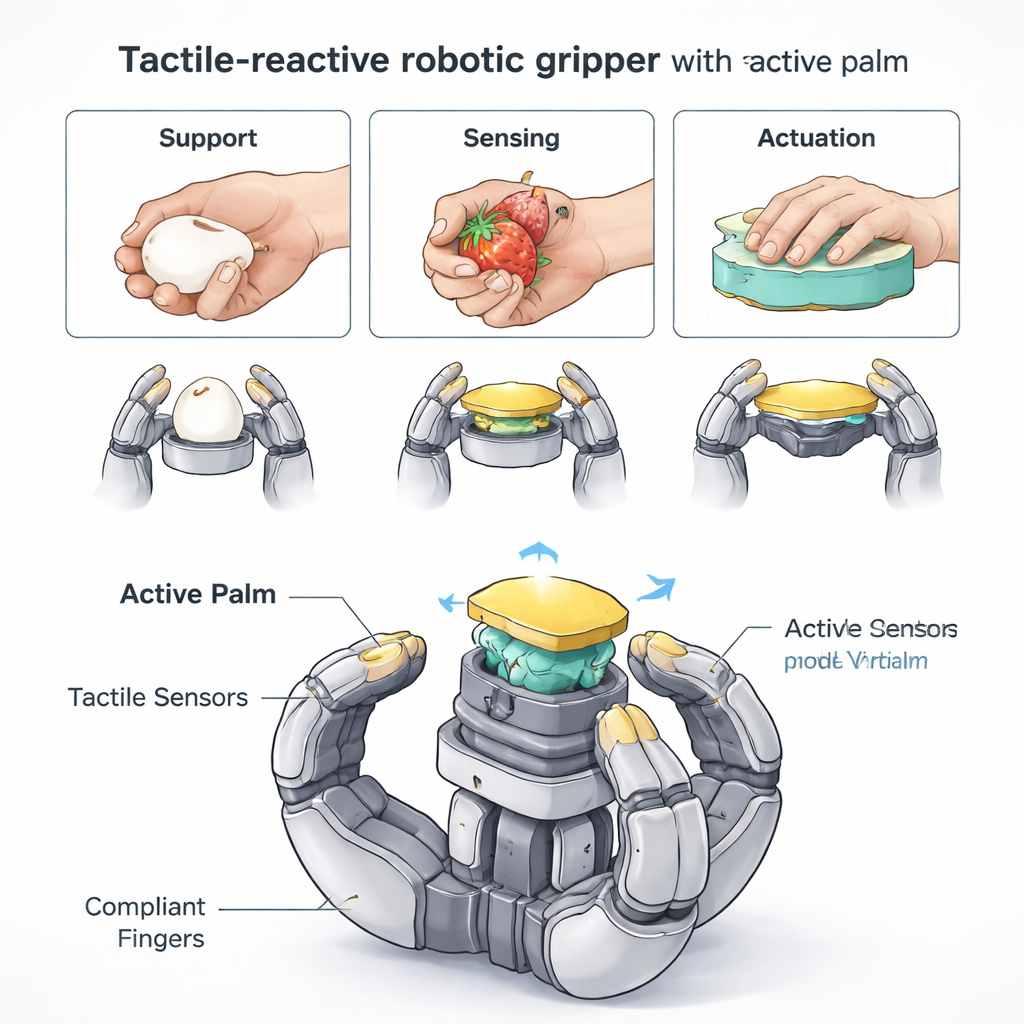
目前大多数机器人手要么是简单的、刚性的爪子,只会抓取;要么是结构复杂、难以制造和控制的多指机械手。本工作的一个关键见解是,人类手部在支撑、触觉和推动方面在很大程度上依赖掌部,而不仅仅是手指。研究人员设计了一个三指机器人夹持器,中央有一个可以上下移动的掌部,并覆盖有基于相机的触觉传感器。每个指尖也配备了柔性的压力感应垫。这些部件协同工作,使夹持器能够感知触碰物体的位置与方式并实时调整握持,尽管整个系统仅使用七个活动关节。
简单运动,多种抓取方式
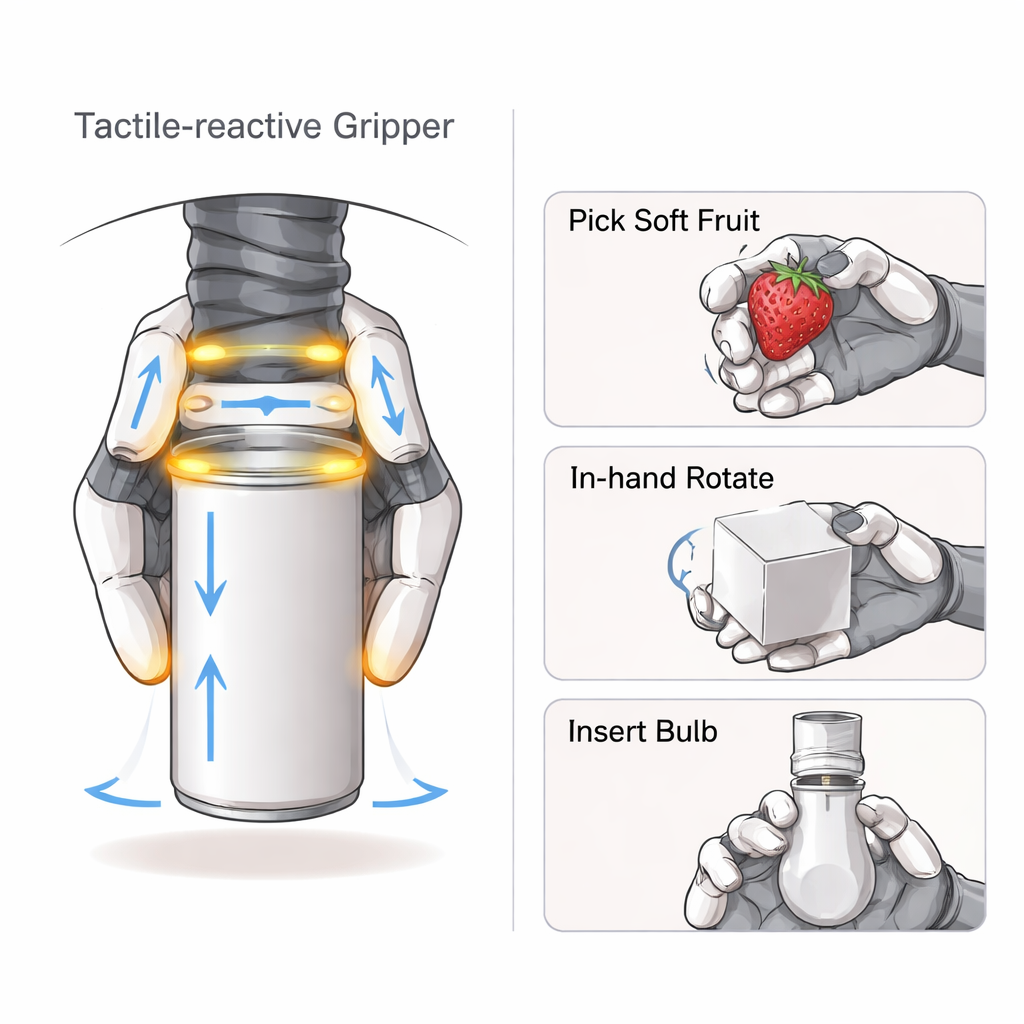
该夹持器的三根相同手指可以扫动并弯曲,支持多种日常抓取方式:像笼式抓取大件物体(如球)、捏起薄片(如卡片)、以及以力量握持夹紧重型工具。柔软、脊柱状的指结构能自然包裹不同形状的物体,无需复杂编程。与此同时,掌部像电梯一样垂直滑动,可以对物体施压、与手指分担载荷,或在手中移动物体的位置。仿真和实验表明,即使每根手指只有两个关节再加上活动掌部,整体也能将物体朝多方向移动并避免难以控制的姿态。
手指与掌部的双重触觉
为了理解所持物体,夹持器结合了三类感知:来自掌部的细节触觉图像、指尖的压力分布图,以及自身关节角度的读数。一个机器学习系统融合这些信号,根据不同物体侧重最有用的线索。在对各种尺寸和材质的饮料罐与球的测试中,该系统识别物体的准确率接近99%。这种丰富的触觉还指导了握力强度、何时停止闭合手指,以及如何移动掌部以保持接触稳定而不产生过多摩擦。
从测试物体到水果与灯泡
团队让该夹持器参加了一个广泛使用的机器人抓取基准测试,包含球、工具和小五金件等日常物品。与若干知名研究型夹持器相比,它在使用更少活动部件的情况下得分更高。超出测试集的实验中,夹持器展示了拾取脆弱水果(草莓、葡萄、西红柿等)而无可见瘀伤的能力,经紫外光检查数日后仍然未见损伤。它还能在手中精确平移与旋转方块与圆柱体,在向上插座中将灯泡拧入,握持筒体同时推动注射器活塞,以及通过按压并扭转来打开儿童防护盖。在许多任务中,活动掌部提供了标准仅有手指的夹持器所缺乏的额外推动、支撑或感知。
这对未来机器人有什么意义
该研究表明,机器人并不总是需要越来越多的手指或关节才能变得灵巧。通过协调少量顺应性的手指与一个主动控制的、具触觉的掌部,这款夹持器实现了强度、细腻度与感知力的混合,开始类似于人手。由于零件主要通过3D打印制造并使用商用传感器,设计相对易于复制。随着基于学习的控制的进一步发展,类似夹持器可助力机器人处理杂货、家庭护理或在工厂中与人安全协作——能够自信地感知它们所做的事,而不是靠猜测。
引用: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
关键词: 机器人夹持器, 触觉传感, 灵巧操作, 机械手, 主动掌部