Clear Sky Science · zh
在水下软翼中利用本体感受实现混合被动-主动扰动抑制
水下的智能翼
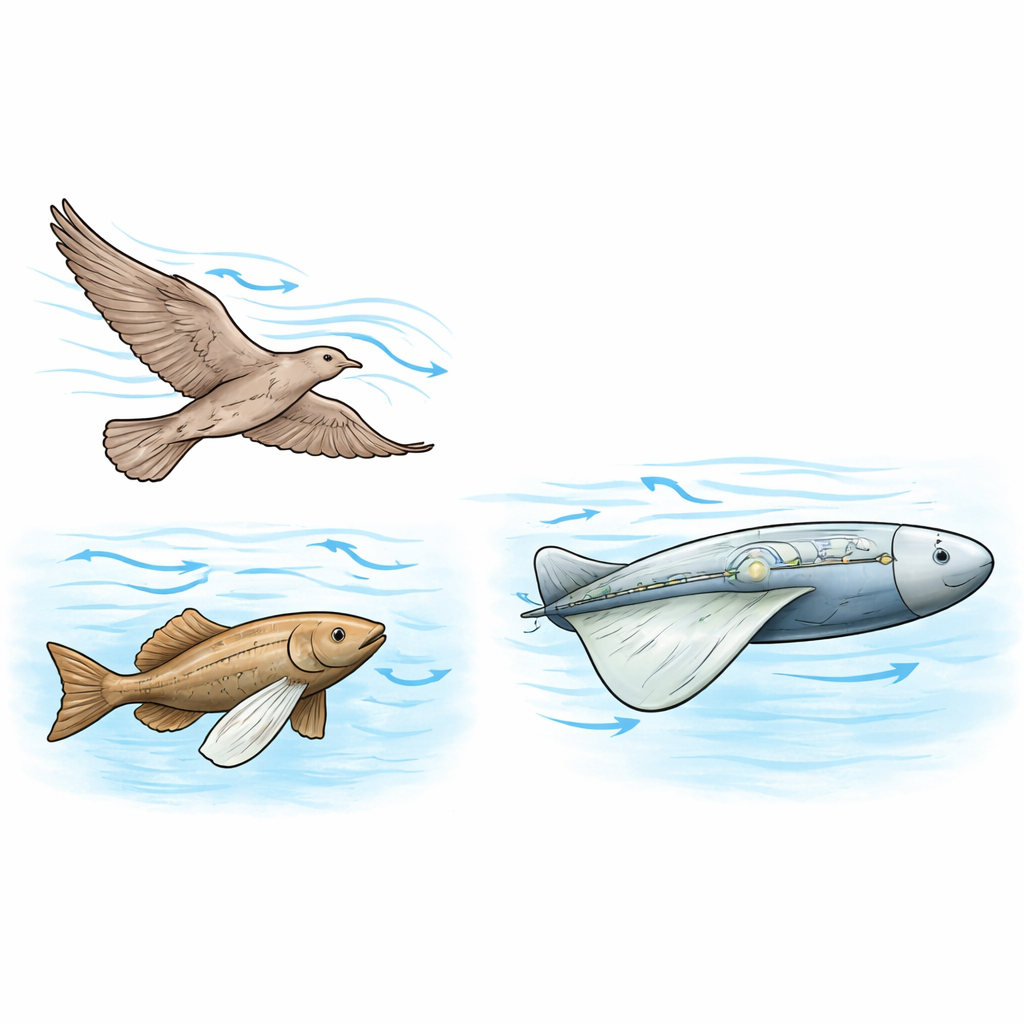
任何看过鸟在阵风中悬停或鱼在急流中稳住身位的人,都见过自然解决一个艰难的工程问题:当周围流体不按预期运动时,如何保持航向。这项研究展示了一种新型软质水下翼如何借助类似动物本体感受的“自我感觉”自动侦测突发流场变化并自我变形以保持稳定。该成果为未来更像动物而非僵硬机器的水下机器人指明了方向——在应对恶劣海况时既省能又稳健。
向鸟类与鱼类学习
在自然界中,翼和鳍并非刚性叶片;它们会弯曲、扭转与变形。鸟类通过羽毛上的微小感受器感知气流,而鱼类则沿体表和鳍棱拥有对压强敏感的细胞。这些内建传感器让动物能感知附肢在流动空气或水中如何变形并近乎瞬时地反应,从而抵消阵风与湍流。相比之下,大多数水下航行器使用刚性控制面并依赖独立的仪器测量流场,当环境变得混乱时,它们显得迟缓且耗能。作者认为,将柔性和传感融为一体的软结构可以缩小这一差距。
具有内建感知的软翼
研究团队造了一只用于水下的半翼,将柔软可弯曲的尾部与刚性机头结合。在软段内部布有充液的可充气管道,通过加压可以改变翼的曲率或凸度(弯度)。在外部,他们贴合了一层由硅胶与液态金属导线组成的薄电子“皮肤”。随着翼体弯曲,埋置导体之间的间距变化,电容随之改变。研究者通过训练一个简单的机器学习模型,将这些电信号与相机追踪的形状对应起来,从而将电子皮肤转化为高精度的形状传感器。训练完毕后,系统可以在无需外部相机的情况下实时估计翼的凸度,即使在水下也能工作。
将形状转化为控制
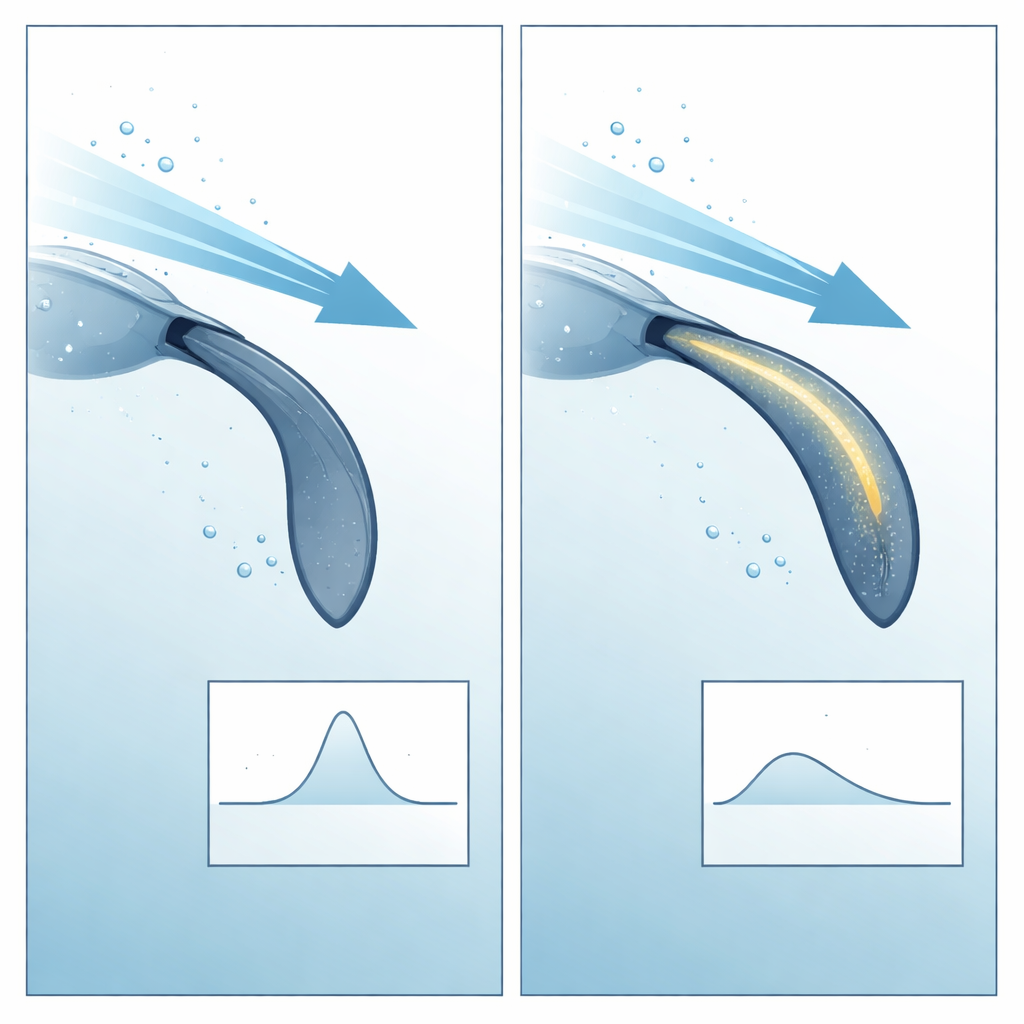
在水洞中装载该本体感知软翼,研究人员通过突然改变翼相对于来流的角度来模拟阵风。首先在稳态条件下他们证明,通过调整凸度可以在不同来流角下产生相同升力,或在相同角度下产生不同升力。这意味着当阵风试图打乱翼的平衡时,形状空间中存在一条“路径”可以恢复期望的升力。随后他们编程了一个理想化的开环响应——在确切知道阵风何时出现的情况下——在合适时刻向内部管道充放气。在这种最佳情形下,改变凸度将扰动期间升力的下降从约50%降低到大约10%。
让翼自行反应
更具挑战性的测试是让翼自我判断何时出现异常。在这里,电子皮肤在凸度信号中识别出一种特征“指纹”:当软体在突变流动下弯曲时会出现的快速超调与振荡。一旦该模式出现,一个简单的控制器便朝最有可能将升力拉回目标的方向充气管道,而无需明确计算流场或力学。即便这种极简策略也表现良好。与等效的刚性翼相比,仅未驱动的软翼就将阵风的冲击——本质上是随时间累积的整体推力——降低了约三倍。当加入主动控制时,总的非期望升力冲击最多可减少87%,接近甚至超过一些鸟类在不同介质中报告的抗阵风能力。
这对未来机器人的意义
对一般读者而言,关键结论是:让水下机器人更柔软并具备自感能力,可以使它们更坚韧且更高效。与其用蛮力马达和复杂的外部传感器去对抗扰动,不如依靠机器人自身的柔性结构和嵌入式皮肤来吸收并读取流场,触发适度的形变以保持航向。尽管这项研究聚焦于受控水槽中的单个实验翼,但相同原理可扩展至整艇或鱼类式游动机器人。从长远看,这种“体现式智能”或可让机器以鸟类与鱼类在空气与水中已有的那种安静优雅,去探险湍流海域。
引用: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
关键词: 软体机器人, 水下航行器, 仿生设计, 流场扰动抑制, 本体感知