Clear Sky Science · zh
关于软物体属性的具身触觉感知
为什么教会机器人“感觉”很重要
想象一下机器人轻柔地检查病人的腹部、在不弄伤果实的情况下分拣成熟水果,或仅凭触觉组装易碎部件。要安全完成这些任务,机器人必须以丰富、类似人类的方式学会“感觉”软物体。本文介绍了研究人员如何构建电子皮肤与一种新型学习模型,使机器人更好地感知软物体的柔软度、形状和表面纹理——将机器带向真正灵巧触觉的一步。
打造高科技的触觉感官
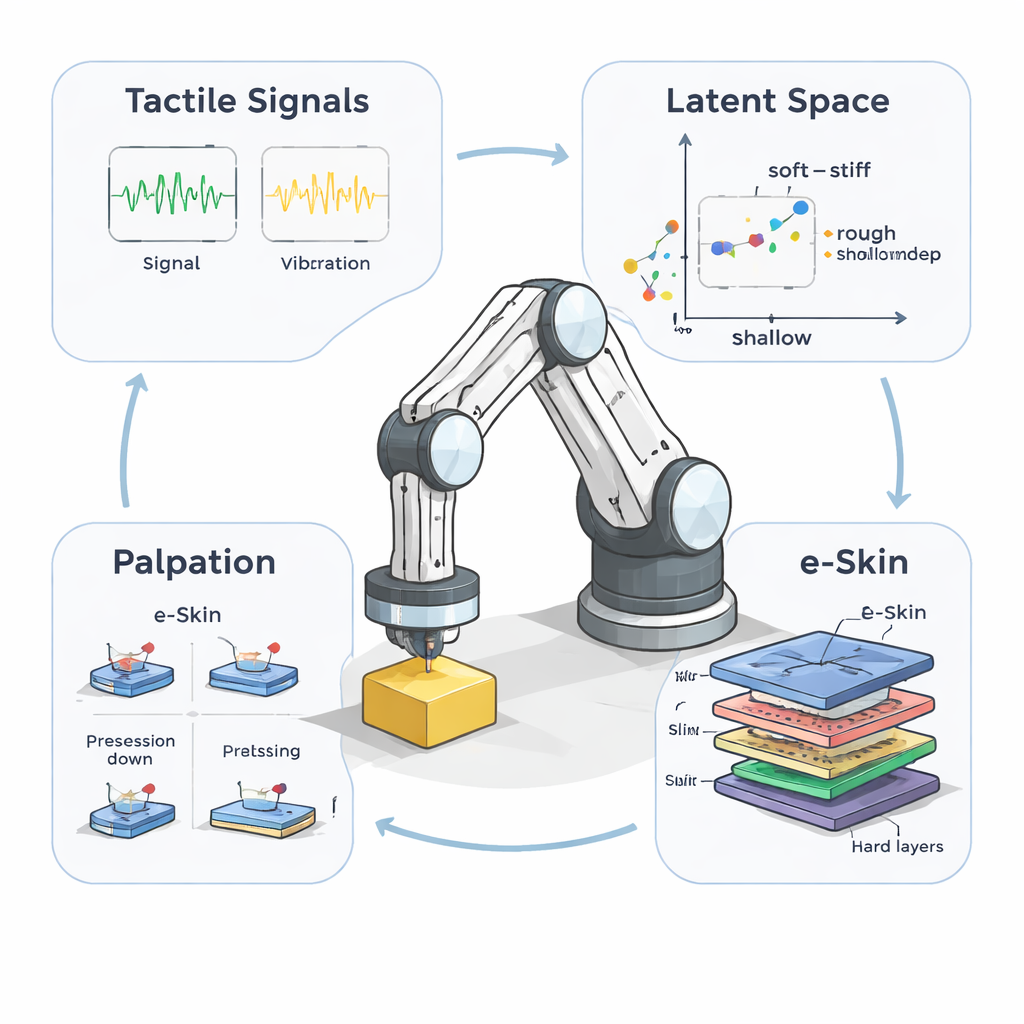
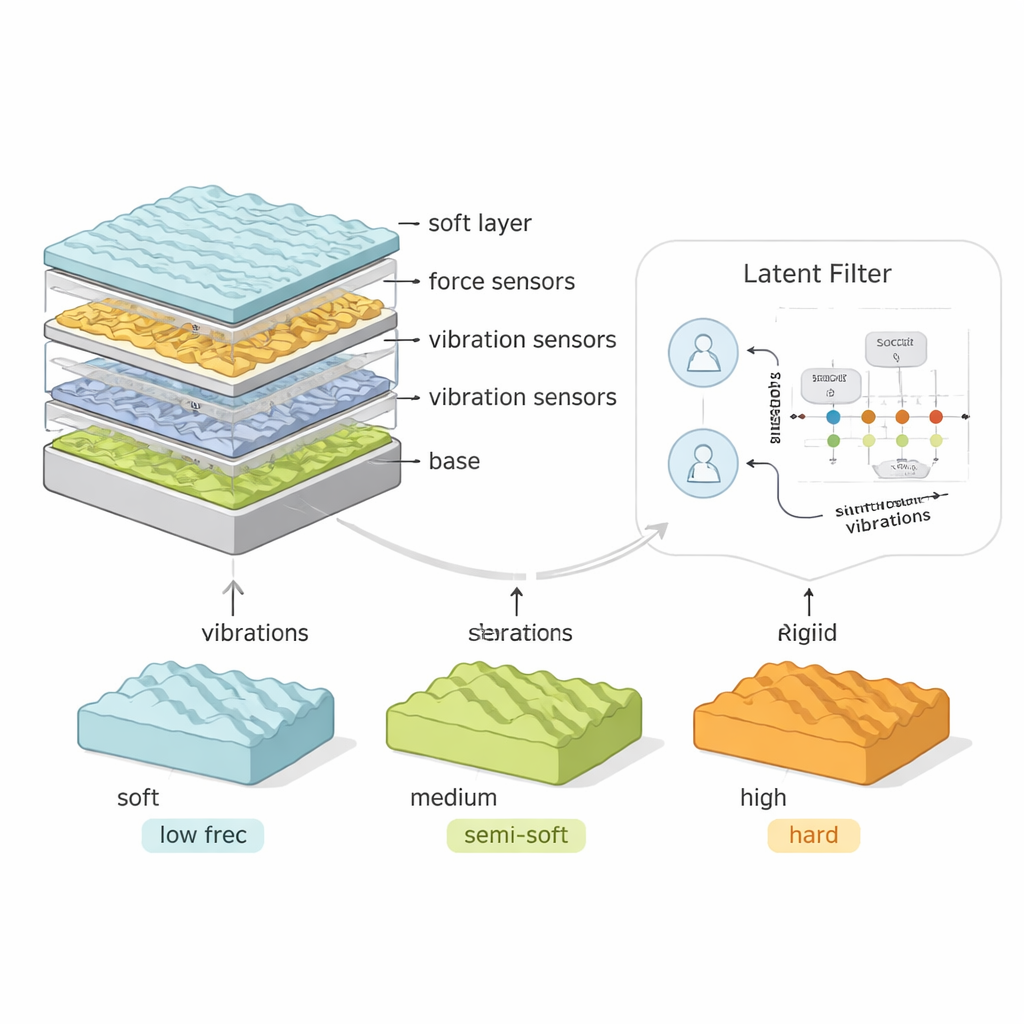
人类皮肤柔软、有层次,并包含对压力、拉伸和振动敏感的多种触觉感受器。团队试图在机器人中模拟这些能力。他们创建了一种模块化电子皮肤(e‑Skin),由嵌入传感器的叠层硅橡胶构成。两层包含密集的力传感器网格,用来测量皮肤不同位置受到的压迫量,第三层则布置了微型加速度计,可捕捉快速振动,比如在粗糙织物上滑动手指时感到的颤动。通过更换硅橡胶类型,可以使电子皮肤本身更软或更硬;通过开启或关闭传感层,可以测试不同“感官器官”的组合。
设计一个软物体的世界
为了在受控条件下研究触觉,研究人员需要的不仅仅是简单的橡胶块。他们创建了一个“波形物体”库,具有经精心调校的属性。每个物体的顶部表面呈波浪状,其凸起可以是浅或高(振幅),且可以相距近或远(空间频率),材料从非常柔软的硅橡胶到刚性塑料不等。一些样本在柔软表面下还隐藏着一层薄的硬层,用以模拟按压更深时组织或材料性质的变化。这使得团队能确切知道机器人接触的每个物体的柔软度和纹理,从而将机器人“感觉”到的信号与真实情况进行比较。
教机器人用触觉探索
正如人们用不同方式戳、按和滑动手指来判断物体,机器人也使用了三种基本的触诊动作。在按压(pressing)中,它上下运动以探测整体的柔软度。在偏移(precession)中,它倾斜并滚动电子皮肤,接触邻近的多个区域以探测更复杂的形状。在滑动(sliding)中,它横向移动以突出细微纹理和摩擦。对于每个物体,机器人以不同的深度和速度执行这些动作,产生成千上万条时变触觉信号——皮肤上不同位置的力变化以及穿过它的振动波。这些丰富的动态数据流比单次静态戳探提供的信息多得多。
在触觉中发现隐藏模式
为了解读这一信息洪流,作者引入了一种称为潜在滤波器(Latent Filter)的机器学习模型。该模型不是直接对物体打标签,而是学习一个内部“地图”,其中每一点概括了机器人与物体持续交互的状态。这个潜在空间被结构化为某些成分对即时触觉信号反应迅速,而另一些成分则随时间缓慢整合信息。通过在大量交互上训练潜在滤波器,团队证明了这个内部地图会自然对应到有意义的物理特征,如表面粗糙度、凸起高度和刚度——尽管模型从未被明确告知这些标签。一个单独的回归步骤证实,这些隐藏特征可以较准确地预测物体的真实力学属性。
皮肤、感知与运动如何协同工作
实验表明,没有单一的传感层或运动策略能适用于所有情况。通过“后期融合”(late fusion)方法将振动和力信息结合——即先分别处理每类信号再合并——能获得对软物体最可靠的理解。两层力传感有助于系统感知剪切和拉伸,这对于检测刚度和隐藏的内部结构至关重要;而振动在滑动时尤为有用,用于感知细微纹理。电子皮肤本身的机械柔软性也很重要:较硬的皮肤更适合测量整体刚度和形状,而较软的皮肤在感知顺应性或分层材料中的细微差异时表现更好。结果表明,机器人触觉应当共同设计:皮肤的属性、传感电子学与机器人运动方式都需要协同调优。
这对日常机器人意味着什么
将分层、受人启发的电子皮肤与一种尊重动作角色的强大学习模型相结合,这项工作展示了机器人如何建立更深层次的触觉。未来的机器不再仅依赖摄像头或简单的力阈值,而是可以感知物体在探查过程中如何屈服、振动和变化,并据此即时调整其抓取或动作。这类能力对医学触诊、软食物处理以及在家庭和工厂中操纵可变形物品等应用至关重要。简而言之,研究表明,要像我们一样有效地触摸世界,机器人不仅需要良好的传感器,还需要合适的“身体”、正确的运动习惯——以及一种将所有这些信息编织成一致理解的智能方法。
引用: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
关键词: 机器人触觉, 电子皮肤, 软物体感知, 触觉感知, 具身机器人学