Clear Sky Science · zh
廉价3D打印微型机器人夹持器,指尖内置相机实现基于视觉的力与力矩感知
微型软体夹持器为何重要
机器人变得越来越小,承担的任务也更精细,从装配微小齿轮到采摘不会破裂的成熟浆果。然而,大多数机械手仍然是“盲握”的,对施加了多大力感知有限。本文介绍了一种低成本、3D打印的微型夹持器,昵称“Seezer”,它既能抓取脆弱物体,又能通过指尖内置的小型相机“感知”力,而无需昂贵的力传感器。
会看的柔软之手
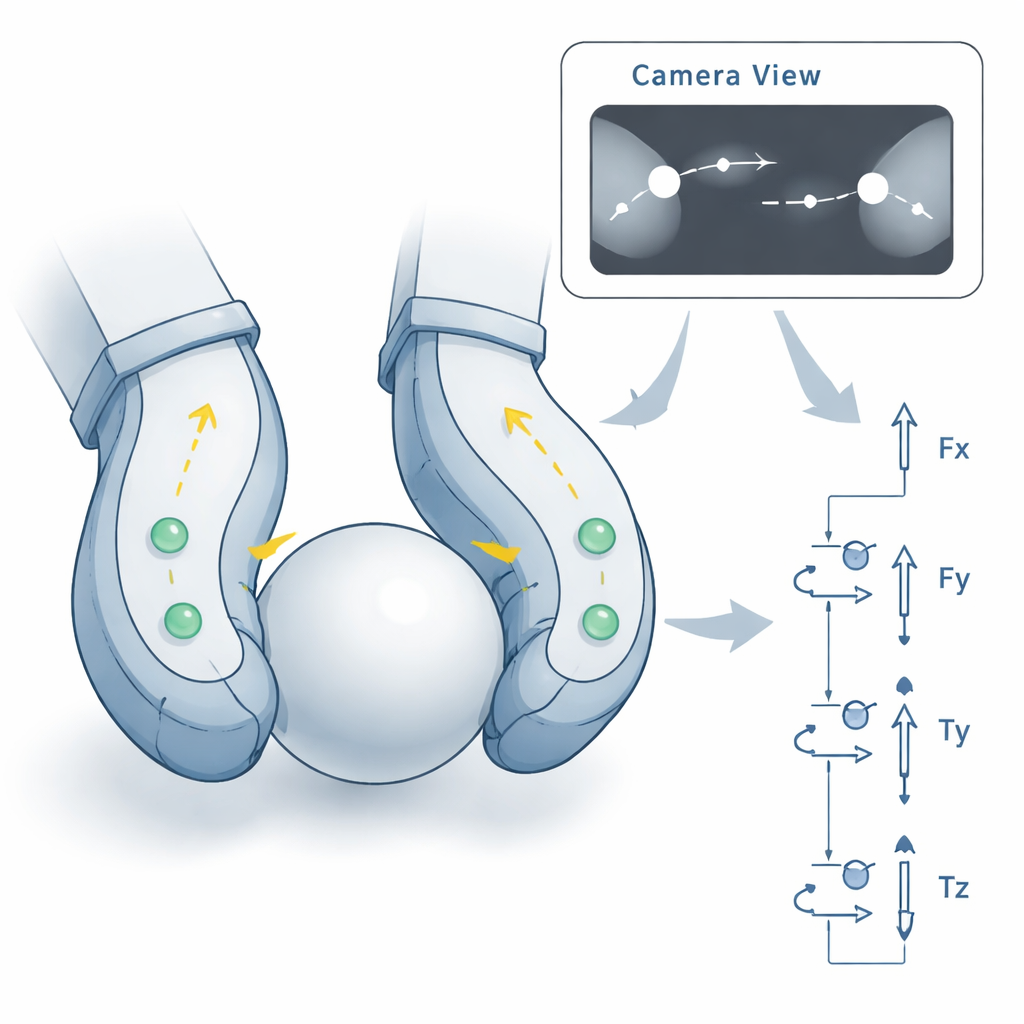
Seezer是一种软性、顺应性的机器人夹持器,其指瓣通过弯曲而非像金属钳一样绕铰链旋转。其核心思想是在消费级3D打印机上一体化打印几乎所有部件:单一的指瓣件包含柔性关节、为任务定制的指尖形状以及小型内置标记。这个一次性指模块可以套装到一个紧凑的电机单元上,电机单元内装有微型相机和照明。当电机驱动蜗轮旋转时,柔性关节弯曲,手指向内闭合抓住物体,同时相机观察指尖及夹持器前方的空间。

从手指弯曲读取力
Seezer没有在指瓣内嵌入电线、应变计或压感垫,而是在内部涂上信息丰富的视觉标记。每个指尖带有小而圆的“识别”标记,这些标记在相机图像中的位置会随指尖变形而变化。软件首先在每帧中检测并跟踪这些标记。然后,基于一段短的校准序列,简单的数学模型学习标记位置的偏移如何对应于各指尖上的实际推拉力。通过将三个位于指尖的力与基础物理学相结合,系统估计夹持器在全部六个方向上的合力与力矩,以及手指之间的挤压力。
它多准确地感知力
为了检验这种基于相机的感知有多准确,作者在受控实验室环境中将Seezer的估计与高精度商用力/力矩传感器的读数进行了比较。对于一种指尖较硬的设计,夹持器测量的夹持力可达约1.1牛顿,典型误差在8%到17%之间,全六轴力与力矩的误差大多在8%到24%之间。较软的指尖版本以更高的灵敏度为代价牺牲了最大握力,产生更小的力但百分比误差仍然可比。重要的是,这些模型只需要31到141个校准数据点——远少于通常需要处理整帧图像的深度学习方法所需的数千张图像。
从微型齿轮到柔软浆果
两个演示任务展示了该夹持器在真实环境中的潜能。其一,Seezer重复地把小型3D打印齿轮从轴上取下、搬运并放回,利用内部相机既对齐齿轮的键槽与轴,也监视手指运动。这类似于狭小空间中的精密工业装配。在另一项任务中,夹持器从果梗上采摘红醋栗。系统实时监视其估计的夹持力,一旦达到预设力阈便停止闭合,从而在不压碎浆果的情况下将其摘下。两个示例都使用廉价电子元件运行,表明一种设计即可处理几毫米尺度的刚性和软性物体。
挑战与未来应用
Seezer仍处于概念验证阶段,存在一些限制。标记跟踪在光线稳定、照明良好且背景简洁的场景中效果最好;光照变化、光滑反光表面和复杂运动可能导致跟踪错误。相机的帧率有限,也限制了系统在紧密力控制或丰富触觉反馈方面的反应速度。指瓣材料在长期使用中可能疲劳或性能变化,团队尚未系统地测试长期性能。作者认为,更鲁棒的跟踪算法或将他们的硬件与现代深度学习力估计器结合,可以提升准确性与可靠性;同时3D打印技术的进步应允许进一步微型化,并可能实现可消毒的一次性指瓣,适用于外科或实验室用途。
这对日常机器人意味着什么
简单来说,这项工作表明,一个小而廉价的机器人手可以通过观察其柔软手指的弯曲来同时“看见”和“感觉”。只需适度的校准数据和现成零件,Seezer就能估计出握力大小以及接触力和力矩的方向,其精度足以用于温和的抓取任务。如果提升了鲁棒性,这一方法能帮助未来机器人在空间与成本受限的场合处理小而易碎的物品——如医疗器械、电子产品、水果,甚至是微创手术中的组织——而无需笨重的传感器或复杂硬件,从而将敏感触觉带入更多应用场景。
引用: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
关键词: 软体机器人夹持器, 基于视觉的力感知, 3D打印机器人, 微型操纵, 触觉反馈