Clear Sky Science · zh
推进软体机器人:介电弹性体与流体执行器的最新进展
更像肌肉的软体机器人
想象一种机器人,它能安全地拥抱孩子、在倒塌建筑的瓦砾中挤过缝隙,或轻柔地按摩衰弱的心脏。要完成这些工作,机器必须像活组织那样弯曲和伸长,而不是发出金属的叮当声。综述论文解释了由橡胶状固体和液体构成的新型“软”电驱肌肉如何让这一设想更接近现实,以及在走出实验室进入日常生活之前还存在哪些挑战。
从刚性电机到柔性电驱肌肉
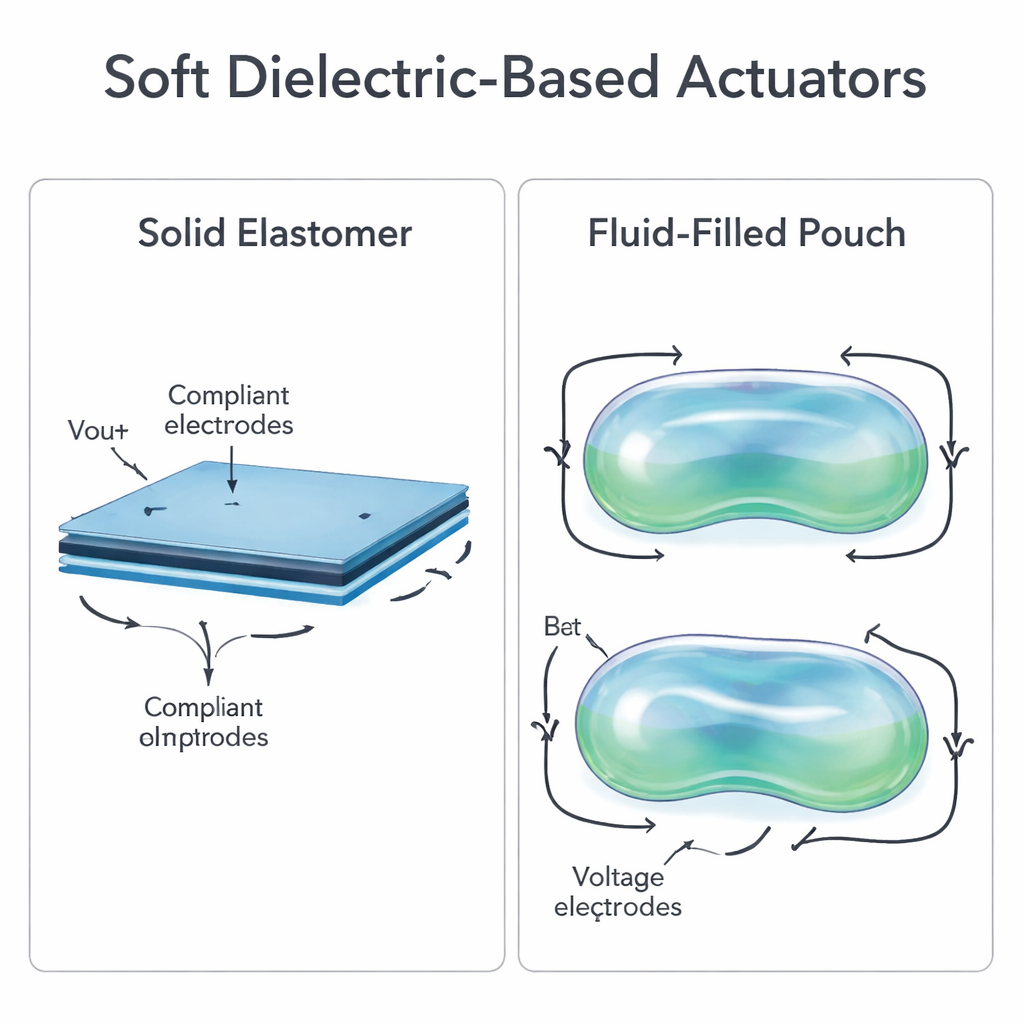
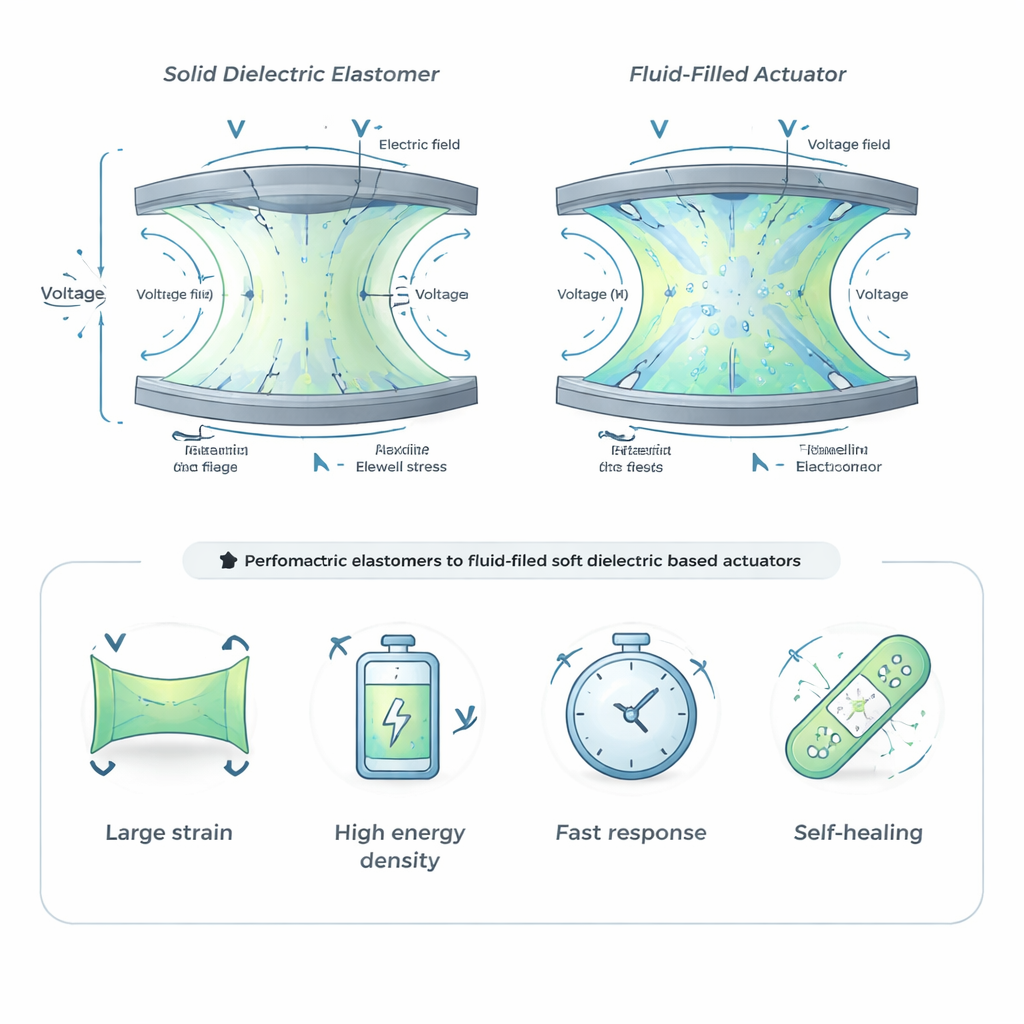
大多数工业机器人依赖沉重且刚性的电机和齿轮。它们强大且精确,但也昂贵、易损,并且在人周围可能存在危险。软体机器人由类似硅胶烘焙器具或橡皮筋的弹性材料构成,用温和、适应性和韧性换取了暴力的输出。本文重点研究由电力驱动的软执行器:介电弹性体执行器(DEA),使用固态橡胶层;以及介电流体执行器(DFA),使用密封在柔性囊中的绝缘液体。在两种装置中,在两片柔性电极间施加电压会通过静电力挤压材料,把电能直接转化为运动,表现出大应变、高能量密度和快速响应。
材料如何让“肌肉”工作
要像有用的肌肉那样工作,这些器件需要非常特殊的材料。对DEA而言,中间的橡胶薄片必须极其柔软以便易于拉伸,同时又要能承受高电场而不易撕裂或击穿。研究人员用两种主要策略来调整这种平衡。一是设计新聚合物——从丙烯酸、硅橡胶和聚氨酯到更为特殊的嵌段共聚物——在柔软、低刚性的网络中引入大量极性化学基团以增强电响应。二是通过混入纳米颗粒或液体来制备复合材料,提高材料的储能能力。DFA的设计思路类似:工程师选择具有合适粘度、稳定性和与薄塑料或硅壳相容性的油类或其他介电液体,使电压能快速推动流体产生凸起、往复行程和振动,同时避免泄漏或化学降解。
大规模制造与驱动软体执行器
把这些巧妙的材料做成可靠的器件本身就是一项工程挑战。传统制造常涉及繁琐的手工步骤:在框架上拉伸薄膜、涂布或印刷柔性电极、叠层,以及在DFA的情况下注液并封口。论文综述了较新的制造途径,如喷墨和丝网印刷、纤维状肌肉的挤出,以及可一次性铺设电极和介电层的多材料3D打印。文中还解释了不同形状如何产生不同运动:在面积上扩张的平片、弹起的圆顶、沿长度收缩的卷筒以及弯曲或振动的结构。由于这些材料会老化、泄漏或因电击穿而失效,作者总结了寿命研究和常见失效模式,并强调了能在电火花或刺穿后自我修复的设计趋势。
更聪明的控制与新兴应用
像天然肌肉一样,软执行器也需要被控制。简单的开环方案仅按预定电压模式驱动,但随着材料升温或蠕变,性能会发生漂移。更先进的方法将传感器嵌入其中——或利用执行器自身的电信号——实时测量应变、力或振动并相应调整驱动信号。研究者正尝试使用机器学习和强化学习控制器来应对软材料的非线性和具有历史依赖的行为。在应用方面,论文展示了广泛的前景:能举起多倍自重的人工肌肉、像鱼或昆虫一样游泳或飞行的机器人、可穿戴触觉带和指尖触觉垫以提供逼真的触感反馈、受鱿鱼和人眼启发的变焦透镜与光控皮肤、形状可变表面,以及可能在未来帮助衰弱心脏或瘫痪面部的概念医疗器械。
实验室演示与现实世界机器之间的障碍
尽管前景可观,这些电驱“肌肉”在能够安全地为家用助手、医疗植入物或大众化可穿戴设备供能之前仍面临诸多障碍。许多器件需要千伏级的驱动电压,这给安全性和电子系统设计带来复杂性。短期测试中表现优秀的材料可能在数百万次循环后变硬、失水或失效。制造通常太慢且一致性不足,难以实现大规模生产。同时,大多数现有聚合物仍难以回收或生物降解。作者认为,进展将依赖于跨尺度的共同设计:开发兼具低刚度、高电响应、鲁棒性甚至自愈性的软材料;自动化、数据驱动的制造与测试;以及利用内嵌传感与轻量级人工智能的控制系统。共同推进这些方向,未来的机器人肌肉不仅会更强更快,也会更安全、适应性更强且更可持续。
引用: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
关键词: 软体机器人, 介电弹性体执行器, 介电流体执行器, 人工肌肉, 触觉接口