Clear Sky Science · zh
用于个性化和针对性互动辅助的模型预测博弈控制
像优秀训练搭档的机器人
想象一下有这样一位训练伙伴或物理治疗师:总能准确把握什么时候帮你发力,什么时候让你稍微费点劲,以及你接下来计划多大力度移动。本文展示了如何赋予接触式机器人——例如康复或工厂中使用的外骨骼——类似的直觉。通过数学上“预测”人在未来一到两秒内的运动意图,机器人可以平顺地分担负荷、降低疲劳,并微妙地引导人们的动作与学习。
为什么与机器人共享用力很难
当机器人与人发生物理连接——帮助他们移动四肢或搬运重物时,双方不断施力并相互反馈。传统机器人控制器大多忽视人类的计划;它们只是追求诸如精度或节能等性能目标。这会导致机器人变得过于僵硬和专横,或过于被动且无用。真实的人类搭档表现得更好:他们感知对方的动作、适应对方的能力,并鼓励从放松到努力的不同行为。作者认为,要让机器人更接近这种互动,机器人必须明确建模人如何规划动作以及他们愿意投入多少努力。
从博弈论看人—机互动
研究者基于博弈论——研究战略互动的数学——将人和机器人视为共享同一任务的两个“玩家”。各自有不同目标:人希望以最小努力追踪期望运动,而机器人希望在帮助追踪的同时尽量减轻人的负担。重要的是,两者都被假定只向前看很短的时间,即约一到两秒的有限规划窗,反映了人类自然的动作规划方式。在这个时间窗内,团队推导出纳什均衡的紧凑公式:一种力量的平衡模式,其中任一方在对方不改变策略的情况下无法改善自身结果。该均衡定义了每一时刻各自应施加的力。
教机器人读懂人类意图
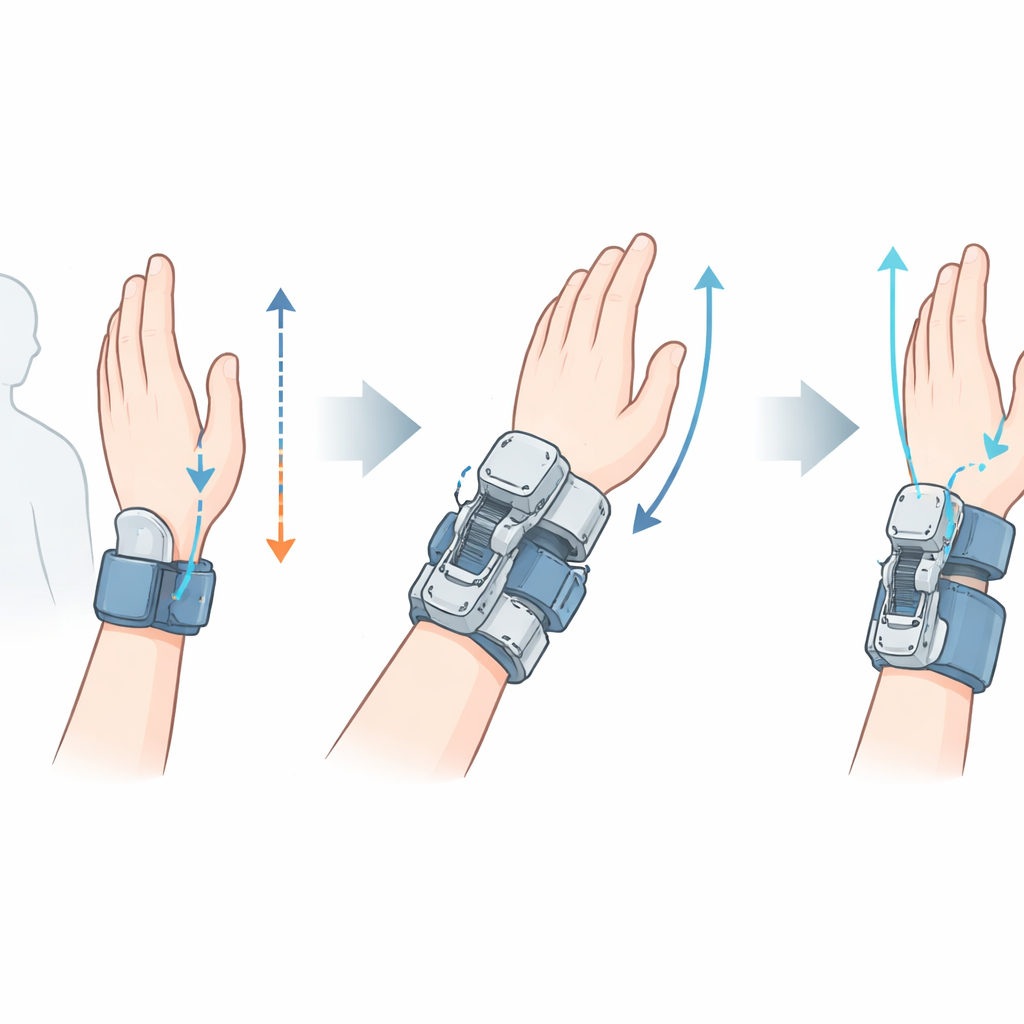
要让机器人参与这种“运动博弈”,它必须先推断出人对精度与努力之间的权衡强度——这是随人而异且会随时间改变的隐藏偏好。作者通过逆向博弈方法解决了这个问题。随着人动作的进行,传感器测量关节角度和产生的扭矩。控制器随后反复搜索一组最能解释近期运动与力历史的人类偏好。有了这些偏好,它便能预测人在接下来短时段内可能的行为,并计算机器人最优的辅助力。所有这些在帮助受试者用手跟踪移动目标的腕部外骨骼上实时运行。
人和机器人学会协同
团队在三项实验中对三十名健康成人测试了他们的控制器。第一项实验中,受试者被要求在主动跟踪目标与保持被动之间切换。控制器迅速调整其内部估计:在主动阶段上升,在放松时接近零。第二项实验中,参与者在有无机器人辅助的试次间交替。使用新控制器时,机器人减少了人的关节用力和肌电活动,同时提高了跟踪精度。经过重复试次,每个人的互动模式趋向稳定的个体“均衡”,人机力量之间的相关性增加——表明相互理解在增强。第三项实验中,研究者引入了一个单一的辅助旋钮——一个改变机器人试图多大程度上最小化人类努力的元参数。调整该旋钮能平滑地改变人们选择贡献的努力量,而不会降低任务表现。
用一个旋钮引导行为
该辅助元参数允许设计者用一个控制跨越一系列互动风格:从几乎不帮助、到均等分担努力,再到近乎完全支持、机器人主导而人可以放松。在中间设置下,人类倾向于与机器人最协调,各自承担大约一半的负荷。推断出的人类偏好模式在不同辅助水平下对每个人保持一致——除非机器人几乎承担了一切,此时人们基本停止参与,行为变得更趋一致。这表明机器人既能发现个体控制风格,也能温和地推动它们,例如在训练的一个阶段要求用户更多参与,在另一个阶段减少参与。
这对康复与工作意味着什么
对非专业读者而言,核心信息是该控制器使机器人更像聪明的伙伴而非僵硬的机器。通过预测我们的动作意图并调整辅助力度,机器人可以在需要时减少我们的负担,在有益时鼓励我们更努力,并保持动作的精确与稳定。相同的数学框架可用于康复——逐步将努力从机器人转移到患者——或用于协作制造,让人和机器人安全高效地分担负荷。本质上,研究显示人会自然而然地适应于“与他们玩同一场博弈”的机器人,从而为更个性化、针对性的互动辅助打开了大门。
引用: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
关键词: 人机交互, 外骨骼辅助, 博弈论控制, 运动康复, 共享控制