Clear Sky Science · zh
在氮化铝双层楔形谐振器上的高速激光多普勒振动计测量
为何将微型机器推向极限速度很重要
现代手机、无人机和导航工具依赖于感知我们运动与转向的微小机械部件。这些微观器件称为 MEMS 传感器,通常以温和的方式工作以保持可预测性和便于控制。在这项工作中,研究人员提出了一个大胆的问题:如果我们将这些微小振动结构驱动到接近材料允许的极限,会发生什么?这是否能让未来的导航变得更加精确?
作为运动传感器的微振梁
许多先进的运动传感器使用振动质量来检测旋转。当质量非常快速地往复运动时,任何设备的扭转或转动都会产生更强的横向力,从而提高传感器的灵敏度。当前的商用传感器将振动速度保持在较低水平(约低于 5 米/秒),以确保行为简单且呈线性。该研究团队着手打破这一障碍,探索微尺度梁在安全范围内能振动得多快,以及在远远超出常规定区时会出现哪些新行为。
为速度设计的楔形梁
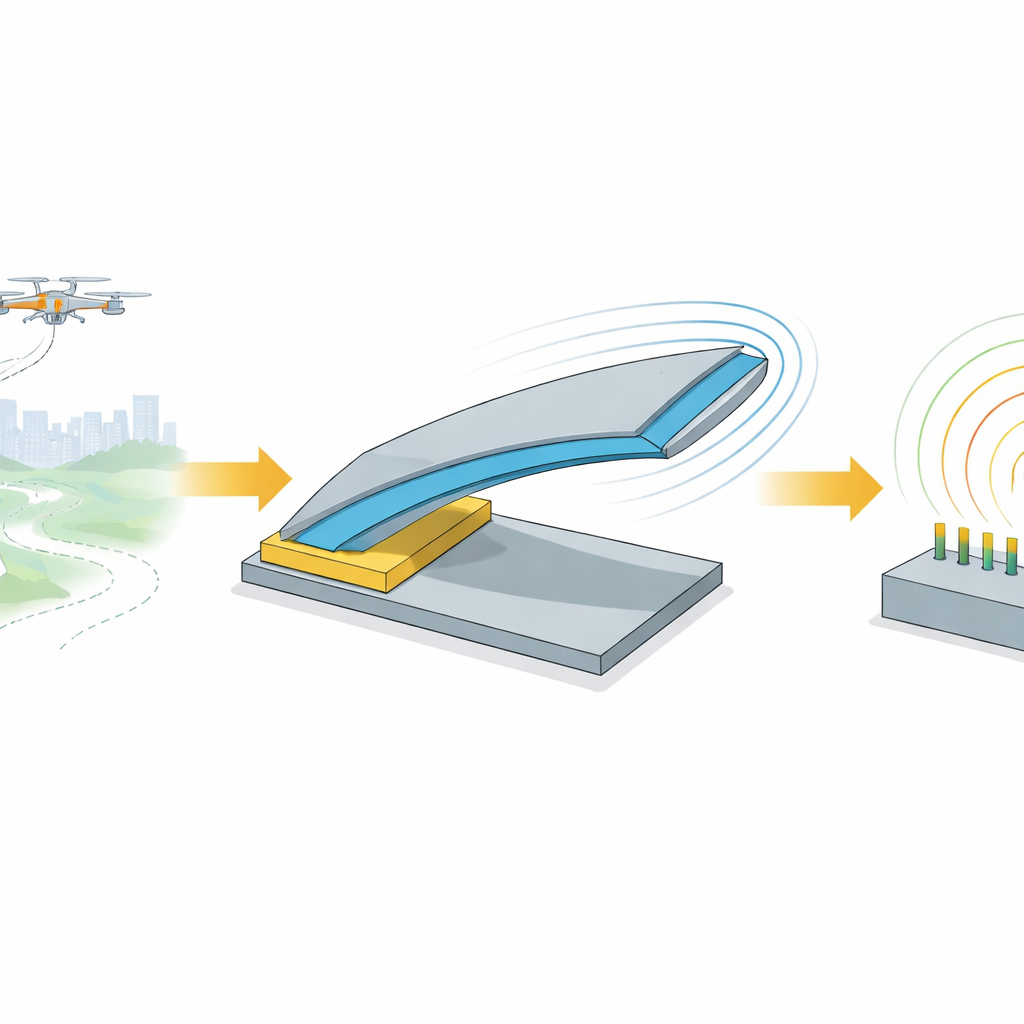
研究人员使用了由氮化铝制成的纤细楔形梁,氮化铝是一种在施加电压时会产生弯曲的材料。该梁厚度仅约一微米,长度约半毫米,一端固定、另一端自由,类似跳板。活性材料的上下金属层使团队在施加高电压信号时能够使梁离开芯片平面弯曲。这个沿长度逐渐变细、完全由压电活性材料构成的简单结构,最初为另一用途设计,但结果成为了实现极端端点速度的理想测试对象。
用激光光束测量极端运动
为了跟踪梁端的速度,团队使用了激光多普勒振动计,这种技术将聚焦激光点照射在振动表面,并通过反射光的微小频移读取其速度。他们将芯片装在一个小型真空室内以减少空气阻力,并用强大的电信号驱动梁,扫过其约 1.81 兆赫的主谐振频率。通过精心设计这些驱动信号,既能保护器件免于过热,又能在逐步将驱动从温和推向极端时揭示其响应如何变化。
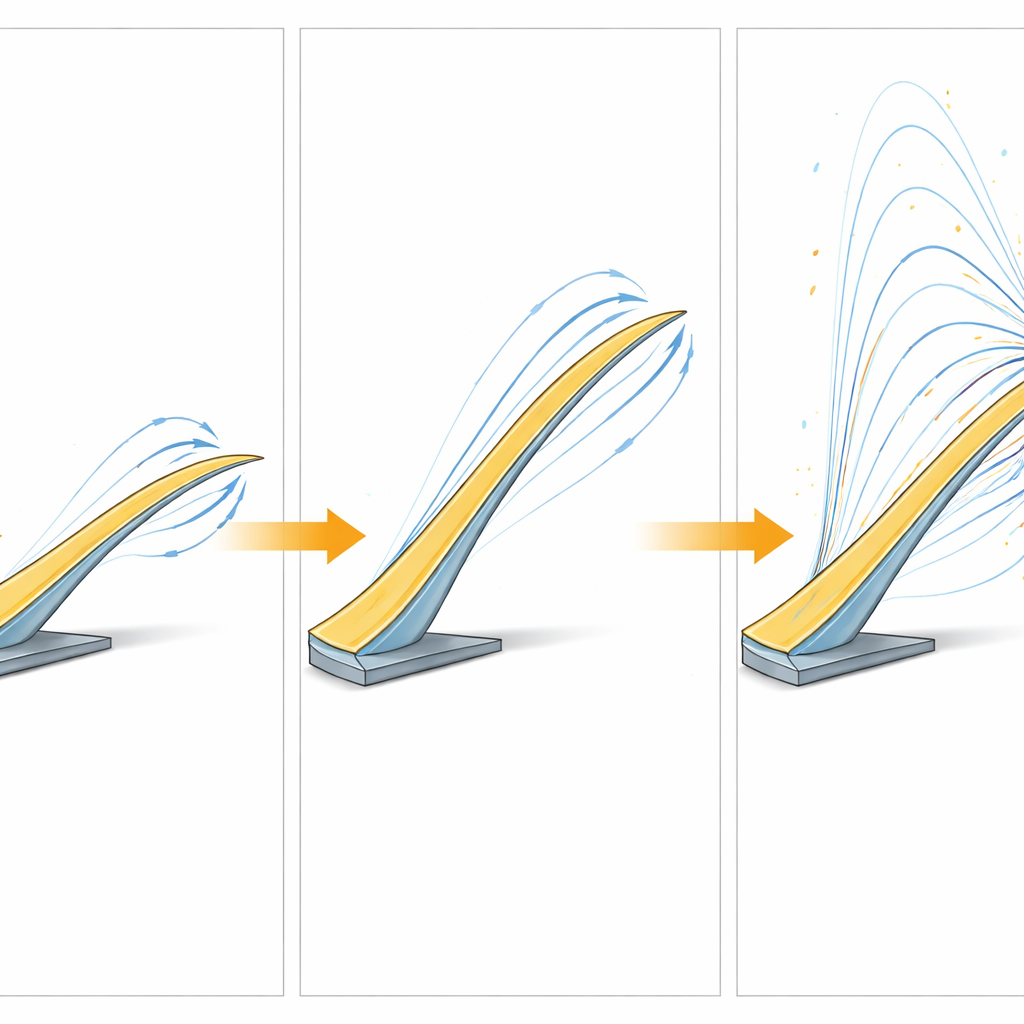
进入狂野的非线性区域
在低驱动水平下,梁表现出工程师通常偏好的行为:对频率变化的响应平滑且对称,向前和向后扫频得到相同结果。随着团队提高电压,运动开始发生畸变。谐振峰出现倾斜与展宽,向上和向下扫频的响应不再一致,表明经典的非线性行为。在真空中最高驱动水平下,端点速度达到约 50 米/秒——大约是类似器件已报道值的十倍——同时在振幅上出现突变并伴随滞回回路,随着驱动强度和频率的变化出现跳跃。使用标准非线性振子模型的数值模拟与这些模式高度吻合,证实了其基础物理遵循着人们熟知但很少被探索的非线性规则。
离破坏有多近才算太近?
将微观梁推到如此速度会带来明显的失效风险。研究人员估算了在峰值运动时氮化铝内部的电场和梁弯曲处的机械应变。他们发现器件运行在大约其电击穿极限的 90% 左右,同时达到预期机械断裂应变的大约一半。换言之,实验在不实际破坏器件的情况下将谐振器带到了其电学和力学极限的附近,为该设计的可用速度提供了现实的上限。
这对未来导航设备意味着什么
通过表明一个微小的芯片级梁在仍然可控的条件下可以以 50 米/秒振动,这项工作展示了 MEMS 设备不必局限于温和、线性的操作。相反,设计者可以考虑在材料极限边缘工作,以为 GPS 无法使用等苛刻场景中的惯性传感器解锁更高的灵敏度。尽管该特定器件并未作为最终产品进行优化,且仍缺乏例如沿第二方向内置感测等功能,但它提供了一个明确的概念验证:通过谨慎管理非线性行为,可以将极端振动从问题转化为下一代微型陀螺仪与加速度计的强大工具。
引用: Liu, Z., Niu, X., Vatankhah, E. et al. High-velocity laser Doppler vibrometry measurements on an aluminum nitride bimorph wedge resonator. Commun Eng 5, 48 (2026). https://doi.org/10.1038/s44172-026-00595-7
关键词: MEMS 谐振器, 惯性传感器, 激光多普勒振动计, 非线性动力学, 氮化铝