Clear Sky Science · zh
利用树冠随时间发展的三维几何进行植树位置的目标驱动优化工具
为何更智能的植树对城市生活至关重要
世界各地的城市都在变得更热,树木是我们用来使街道更凉爽、更清洁、更宜人的最简单工具之一。但在空间紧张、建筑投下长长阴影的密集城市区域,“哪里能种就种”往往浪费了树木的潜力。本文介绍了一种新的数字工具,帮助规划者精确决定在哪里种树,使未来的树冠长成合适的形态——几十年间在不与建筑、街道或其他用途发生冲突的前提下,提供遮荫、降温和舒适。

从平面地图到三维树冠目标
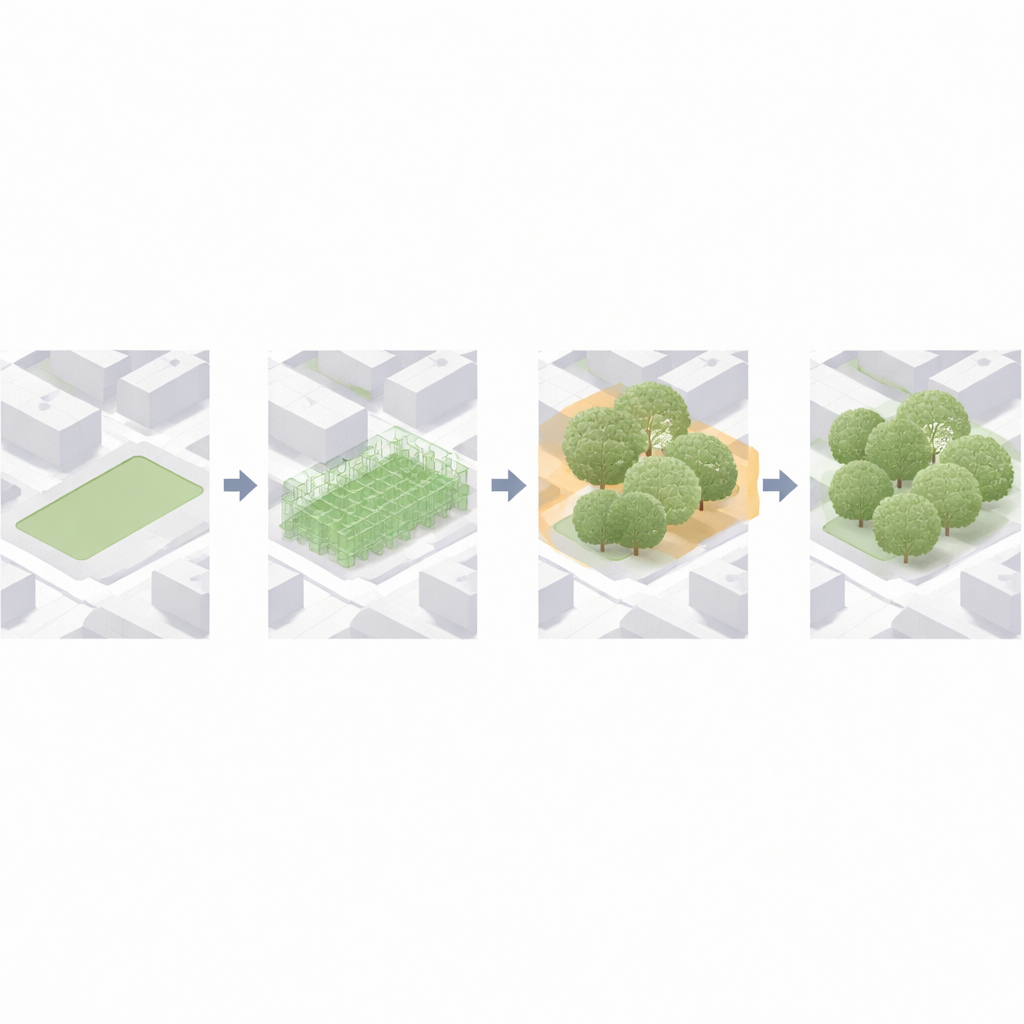
以往的大多数城市树木规划工作把树当作地图上的简单圆圈,关注诸如遮挡人行道、为公园降温或保护建筑立面的宏观目标。这些方法通常一次只优化单一效益,并依赖简化的树形。新工具称为TreeML-Planter,颠倒了问题:不是问“如果在这里种树我们会得到什么?”,而是从一个三维目标开始——在空间中某个体积内叶片最有用的地方——然后反向寻找最佳种植点。该目标以漂浮在地面上方的小立方体(体素)云表示,指出未来冠层应当出现或避免出现的位置。
数字树木规划如何提前思考
为了达到那些目标体素,工具需要了解真实树木在城市复杂环境中的生长方式。它使用一个基于数千棵城市树的详细三维扫描训练的机器学习模型,来预测冠幅在不同方向上的大小和形状,依据物种、年龄以及附近的建筑或其他树木。对于网格上每个可能的种植点,模型估算树冠随时间如何向上、向侧面及绕过障碍物扩张。然后把这些预测的树冠转换为与目标相同的基于立方体的系统,从而可以将期望与每种树布局在空间上实际产生的效果进行对比。
让算法调整树的位置
一旦设定了目标冠层和生长预测,TreeML-Planter使用一种优化例程,运作有点像反复在棋盘上轻推树木。它从定义好的种植区内的随机种植位置开始,确保树与树之间不会太近。对于给定的布局,它将预测的树冠与目标体素云重叠,并用一个评分来计算匹配程度,该评分奖励填满目标体素并惩罚冠层溢出到禁区。算法随后测试每棵树的相邻位置,保留能提高得分的变动,放弃不能的。经过多次运行,这种“爬山”过程逐步收敛到能最好地填满目标冠层体积的种植布局。
在慕尼黑一个真实广场上的测试
研究者在慕尼黑市中心一处建设密集的广场进行了测试,该广场由四层建筑环绕,内部相对开阔。他们关注两种常见的城市树种——小叶椴(Tilia cordata)和伦敦梧桐(Platanus × hispanica)——并探索不同树数和目标年龄,例如五棵、七棵或九棵树长到20、40或60年的情形。该工具为每种情景生成了优化的种植位置和未来冠形。对于椴树,九棵目标为40年冠形时与目标冠层匹配最佳;对于梧桐,九棵在20年时表现最好,较快达到较高得分。有趣的是,更多的树或更老的目标年龄并不总能带来更好结果,这凸显了物种特性和生长习性如何与街道和建筑的紧密几何关系相互作用。
局限、挑战与未来可能性
尽管功能强大,当前工具仍有局限。它需要相当长的计算时间,仅用慕尼黑的数据进行了验证,并侧重于地上生长,未考虑根系、土壤条件和地下基础设施对树木健康与冠形的复杂影响。它还使用通用的生长方程,可能无法完全捕捉单株树在局部胁迫下的反应。即便如此,这一框架具有灵活性:未来的工作可以纳入更多物种、其他城市,以及基于降低热量、改善舒适度或为太阳能板保留日照等目标更智能地生成目标冠层的方法。
这对更绿、更凉爽的城市意味着什么
简言之,这项研究表明我们现在可以把城市中的树木设计成不仅仅是地图上的点,而是随时间演化的三维活体结构。通过为叶片应达到的空间位置设定清晰目标,并预测不同物种如何随时间在建筑间生长,TreeML-Planter帮助规划者选择能在需要之处长期提供遮荫和降温的种植位置,同时避免与街道、视线和基础设施发生冲突。如果与气候和舒适度模拟结合,此类工具可引导下一代城市林业——通过每一棵精心种植的树,使城市变得更凉爽、更健康、更宜居。
引用: Yazdi, H., Chen, X., Rötzer, T. et al. A 3D target-driven optimisation tool for tree planting location using temporal tree crown geometry development. npj Urban Sustain 6, 44 (2026). https://doi.org/10.1038/s42949-026-00350-z
关键词: 城市树木, 小气候降温, 植树设计, 三维冠层建模, 城市可持续性