Clear Sky Science · zh
合成 X 射线驱动的微型医疗器械跟踪与控制
更小的器械、更安全的手术
外科医生开始使用微小、无线的医疗器械,它们可以在血管和其他狭窄通道中爬行以递送药物、疏通堵塞的动脉或测量体内深处的生命信号。这些微型器械承诺带来更温和的操作和更快的恢复——但前提是医生能在实时中安全地看到并操控它们。本文介绍了 MicroSyn-X,一种用于训练计算机在 X 射线影像上跟踪这些微小器械的新方法,为更精确、更少侵入性的手术铺平道路。
看不见的助手带来的问题
如今外科成像的主力是 X 射线透视,它在屏幕上显示骨骼、血管和器械的动态阴影。然而,微型器械非常小且信号微弱,经常融入嘈杂的背景中。它们可能被骨骼、金属工具或造影剂遮挡,而软体或液态机器人在运动时会不断改变形状。人工操作者必须密切盯着屏幕,手动调整磁场或导管,这一过程既缓慢又疲劳,容易出错。让计算机视觉——能够“看见”的软件——来帮忙是可行的,但通常需要大量精心标注的图像。对于这些新器械,这类数据集几乎不存在,因为收集它们成本高、耗时且受患者隐私限制。
用“假的但可信”的 X 射线教会计算机
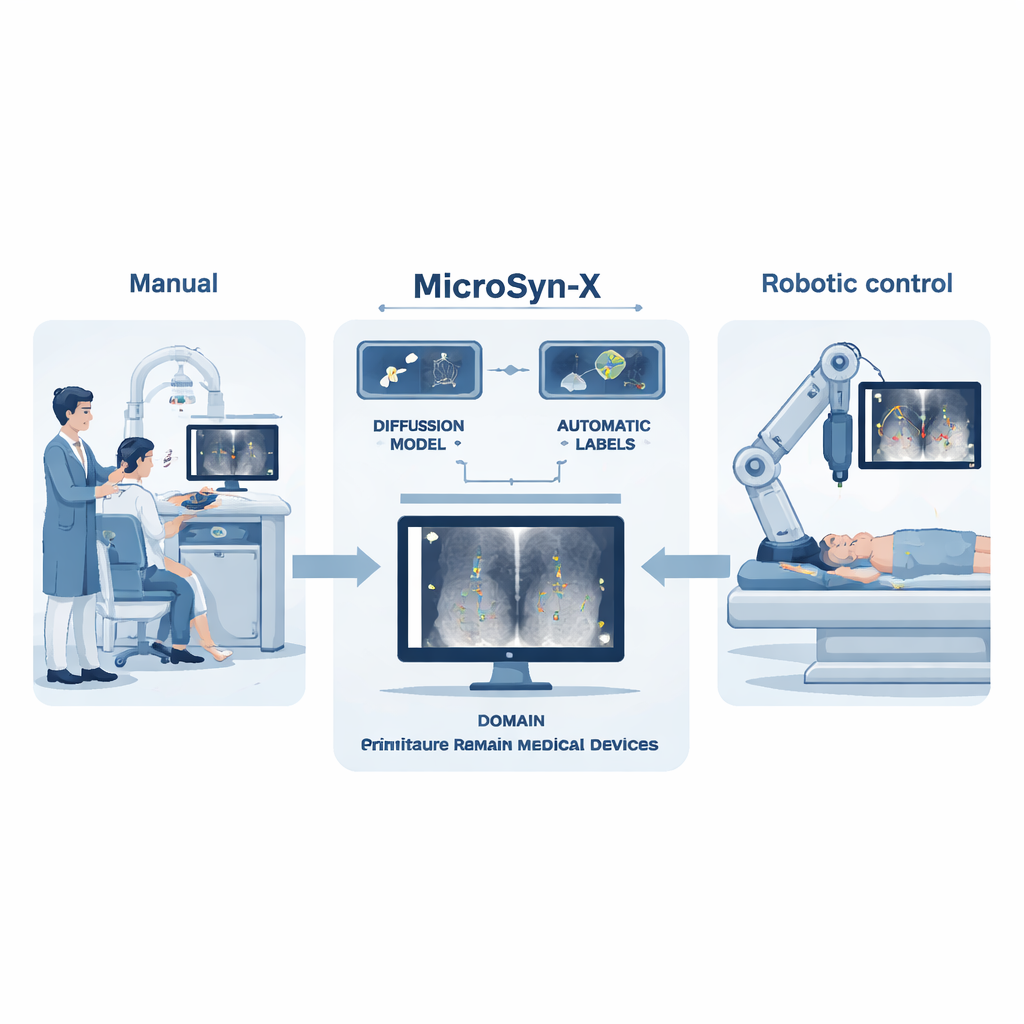
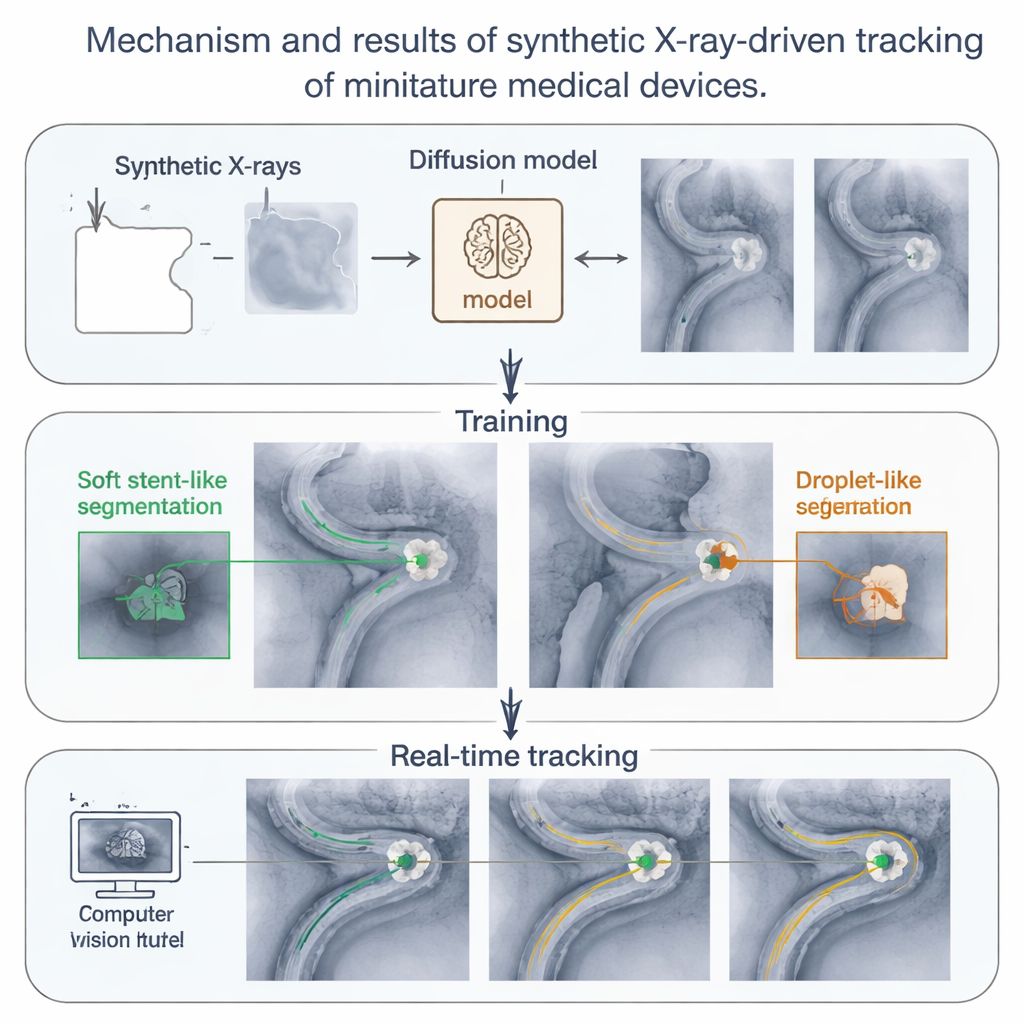
MicroSyn-X 通过自行生成高度逼真的 X 射线图像并附带标签来解决这一数据瓶颈,这些标签精确告知学习算法每个器械的位置。首先,该系统使用一种现代图像生成器(扩散模型)生成栩栩如生的器官、骨骼和手术器械背景 X 射线图像,生成过程由简单的提示词和概略掩膜(用于勾勒组织、金属和充满液体的通道)引导。然后,将微型器械的图像——要么是一次在干净背景下拍摄得到,要么是为液滴类器械用数学方式绘制的——数字化地融合到这些场景中,使其看起来像真实位于体内。因为计算机确切知道每个器械被放置的位置,它能自动生成精确的轮廓和边界框,省去了繁琐的人工作标注。
用可控的混沌为真实世界做准备
MicroSyn-X 的一项关键创新是“领域随机化”,即在合成图像中故意注入各种变化。系统自动改变器官形状、器械位置、亮度、噪声水平,甚至器械被骨骼或工具遮挡的程度。它还为液态机器人创造多种不同形态,这些机器人可以伸长、分裂成群并重新合并。通过让学习算法面对数以千计的略有不同的场景——其中许多在真实患者中稀有或难以获取——作者训练出能关注器械本质视觉线索而非表面模式的模型。测试表明,仅用这些合成图像训练的模型在低对比度、高噪声或严重遮挡的难题中,能与甚至优于用真实 X 光训练的模型。
从屏幕到手术室的机器人
研究者不仅在软件上验证,还将 MicroSyn-X 直接连接到机器人系统。机械臂在组织附近悬持强磁体,同时 C 型臂透视机捕捉 X 射线图像。经 MicroSyn-X 训练的视觉模型在每帧中识别软质支架状机器人和液滴,并由跟踪算法将这些检测结果拼接成平滑路径,即便器械短暂被骨骼遮挡也能保持连贯。利用这些反馈,机器人引导器械穿过弯曲的人造血管、体外的真实动物器官以及活体兔子和大鼠的动脉。该系统成功地同时操控多个器械,跟踪它们穿过分支血管,并在磁控下监测分裂与合并的液滴群——所有这些都在具有挑战性的成像条件下实时完成。
迈向更智能、更微创的护理
简言之,这项工作表明,计算机可以通过在大量精心制作的“假” X 射线上进行练习,学会在体内安全地跟踪微小的手术器械,从而替代稀缺的真实影像。MicroSyn-X 将合成成像转化为机器人学的实用引擎:它生成逼真的训练数据,教授视觉模型,并将模型输出传入已在活体动物中验证的磁导航系统。随着这些方法成熟并在更复杂的病例中得到测试,它们有望帮助外科医生以更高的精度和更小的负担完成精细操作,使我们更接近一个由微型机器人队列从内部悄然改善治疗效果的未来。
引用: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
关键词: 微型医疗器械, X 射线成像, 合成数据, 医疗机器人, 计算机视觉