Clear Sky Science · zh
运动会调动情境依赖的运动策略以稳定灵长类动物的头部
为什么在移动时头部保持稳定很重要
每次你行走时,大脑在背后默默工作以保持头部出人意料的稳定。这种稳定性至关重要:稳定的头部帮助眼睛和内耳解析外界信息,使你看得清楚并保持平衡。这项对恒河猴的研究提出了一个看似简单但对神经科学、康复甚至机器人学都有重大意义的问题:大脑是否始终采用相同的“默认”肌肉活动模式来稳定头部,还是会根据我们如何以及在何处移动而切换策略?
在不同日常情境下测试行走
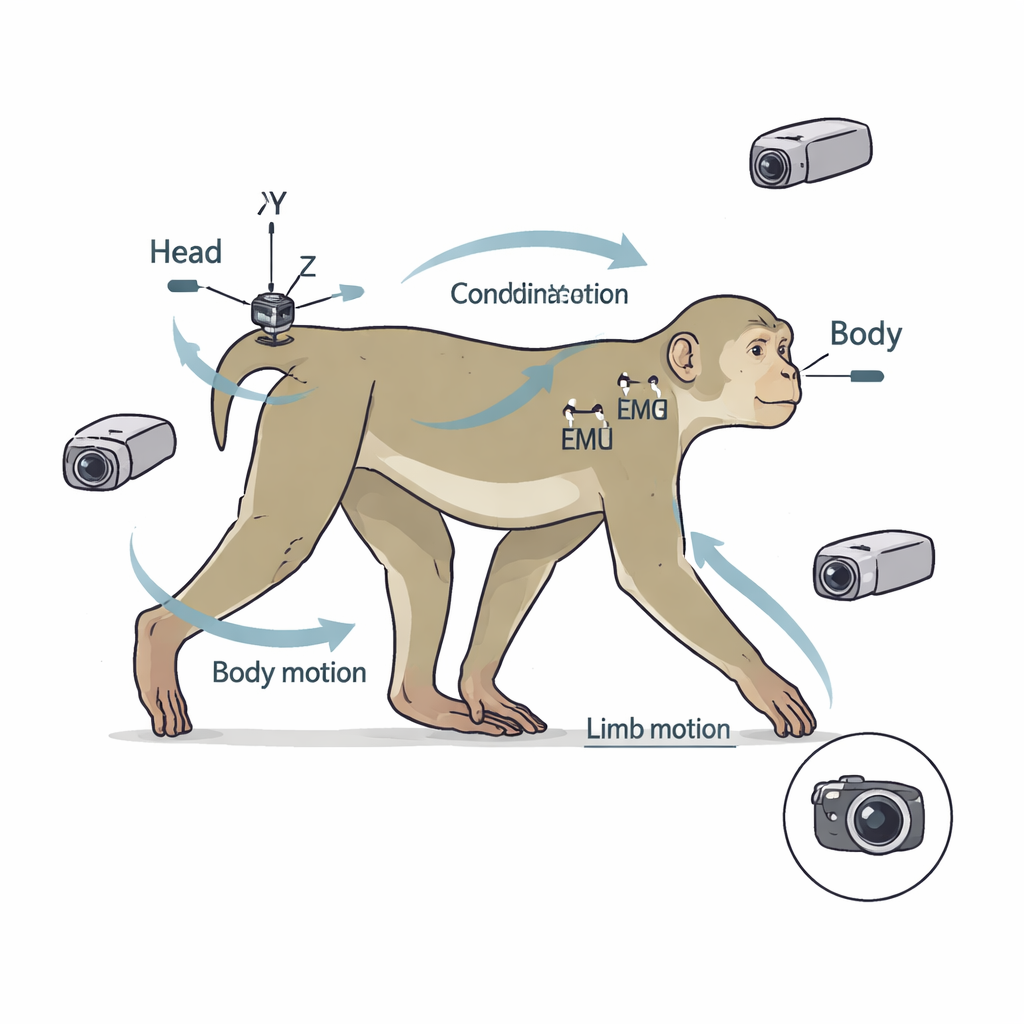
研究者训练猴子在三种主要情境中行走,这些情境反映了人类熟悉的经验。一种是动物在电动跑步机上行走,跑带速度在一系列速度下被精确控制;另一种是它们沿直道以自身自然步速在地面上行走;第三种情境是在一只友好的同类靠近时行走,形成一种略微兴奋的社会环境,研究组通过测量瞳孔大小来跟踪行走动物的觉醒水平。在猴子行走期间,科学家收集了详细数据:四肢、躯干和头部的三维运动;来自移动和稳定头部的颈部肌肉的微弱电信号;以及作用在头部的力和加速度。
在移动的身体上保持头部稳定
在所有条件下,猴子都能在空间中将头部保持得出奇地稳定,即便身体其它部分在下面有节律地运动。在跑步机上,更快的跑带速度产生更大的力以及更高的头部速度和加速度,然而整体的左右和上下头部位移仍然很小,且常常随速度变化不大。颈部像一种内在的稳定器,利用头相对于身体的运动来抵消躯干的移动。在某些方向上,尤其是头部的滚转运动,这种补偿几乎是完美的:头部几乎与身体相反方向移动,抵消了大部分运动。其他方向上,如俯仰和垂直方向,补偿只是部分性的,有时还会出现过度补偿,反映出颈部力学的限制。
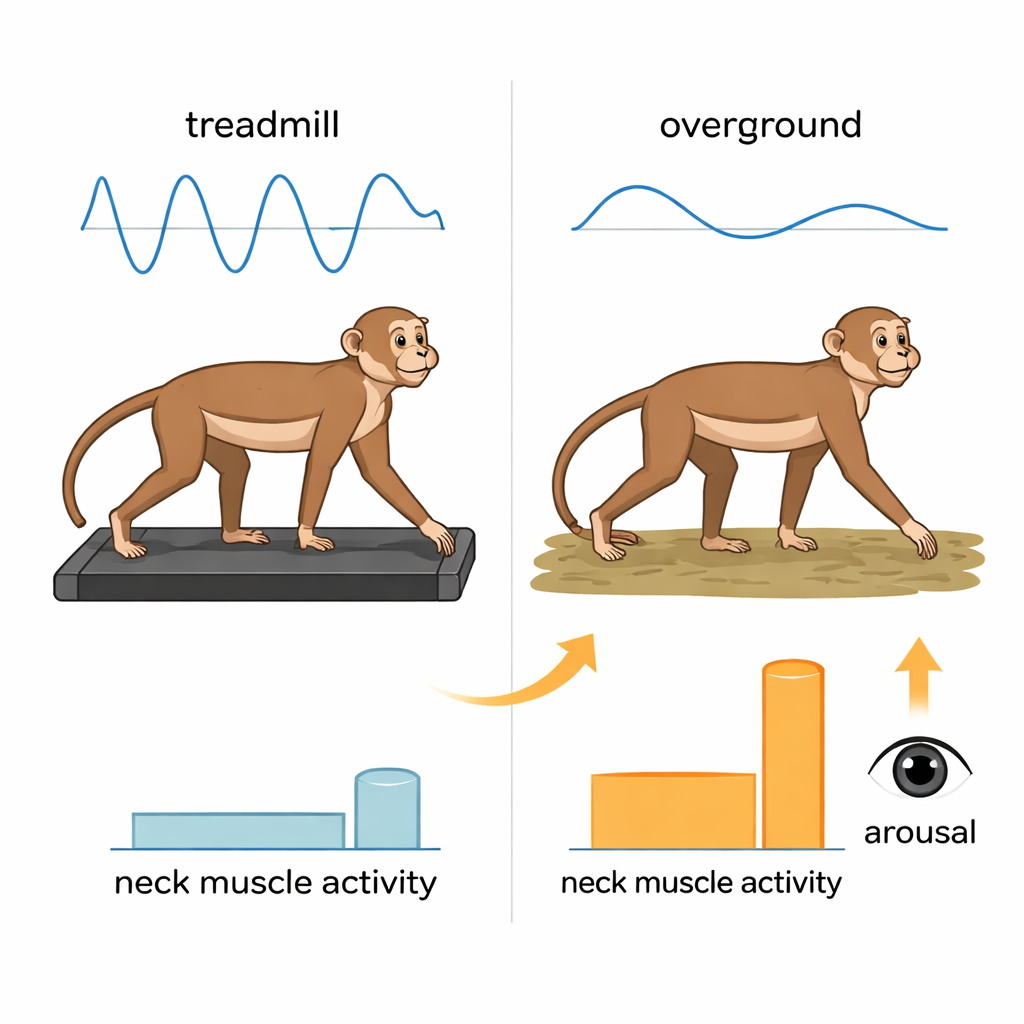
自定步速行走需要不同的运动方案
当相同的猴子以与跑步机匹配的速度在地面上行走时,它们的头部稳定性实际上更好。头部旋转和加速度总体上更小,尤其在上下和俯仰方向上更为明显。然而,这种更好的表现并非仅仅来自将相同控制策略“增强”。来自关键颈部肌肉的记录显示,在地面行走中肌肉活动更强且在步周期中更早开始,即便与跑步机的最高速度相比也是如此。为进一步探究,作者使用了数学工具来同时观察所有记录肌肉的模式。在跑步机上,肌肉群的总体模式随着速度平滑伸缩:更快的行走在时间和强度上拉伸了相同的基本活动循环,而形状并未改变。相比之下,地面行走在这个低维空间中呈现出明显不同的模式,表明大脑重新组织了颈部肌肉的协同工作方式,而不仅仅是把相同的模式加大力度。
兴奋提升力度,但不改变基本模式
在社会条件下——当同类在场且行走猴子的瞳孔扩大时——为内部状态提供了检验。在觉醒水平提高时,头部运动变得更稳定,补偿性的头对身体运动也有所改善。颈部肌肉放电更强,但其在步态中的时序以及在肌群空间中的整体协调模式与正常地面行走相比基本保持不变。换句话说,更加警觉放大了现有地面行走策略的输出,但并未重写其底层结构。这与跑步机与地面行走之间观察到的更大转变形成对比——在那里外部力学和感觉线索的差异更为显著。
这对大脑、临床和机器意味着什么
对普通观察者而言,主要结论是:我们的脑并不依赖单一、固定的“程序”在行走时稳定头部。相反,它们会根据情境选择并调整不同的低复杂度策略——无论是由跑带驱动、在真实空间中自定步速,还是在更兴奋的内部状态下行走。跑步机行走由一个随速度缩放的稳定模式控制,而地面行走则招募了一个组织方式不同且显然更有效的方案,利用自然的身体力学和更丰富的感觉反馈。觉醒则像音量旋钮,提升该方案的力度而不改写它。这些见解有助于解释为何跑步机和地面行走在感觉和功能上可能不同,提示设计针对头颈控制的康复方案的新思路,并为需要在不可预测环境中保持“头部”稳定的机器人提供灵感。
引用: Wei, RH., Stanley, O.R., Charles, A.S. et al. Locomotion engages context-dependent motor strategies for head stabilization in primates. Commun Biol 9, 234 (2026). https://doi.org/10.1038/s42003-026-09512-2
关键词: 头部稳定, 行走, 颈部肌肉, 跑步机与地面行走, 运动控制策略