Clear Sky Science · zh
集成具有1024导电级的MoS2记忆晶体管的多级卡尔曼滤波传感器融合系统
更聪明的感知,助力更安全的自动驾驶汽车
现代自动驾驶汽车依赖众多传感器来感知道路,但要快速且高效地融合所有这些信息却异常困难。这项研究展示了一种新型微小电子器件——记忆晶体管,如何加速并简化这种称为传感器融合的信息整合过程。通过将关键计算从笨重的数字芯片迁移到精简的模拟硬件,研究人员显著降低了能耗和延迟,朝着能在恶劣天气、视线受阻和道路拥挤等复杂情形下仍保持响应迅速、更安全的自动系统迈进。
众多“眼睛”胜过单一视角
在今天的测试赛道和高速公路上,自动驾驶车辆通过相机、激光测距(LiDAR)、毫米波雷达和用于跟踪车辆运动的惯性传感器等多种传感器观察周围环境。每种传感器都有其优势与局限:LiDAR可能被卡车或建筑物遮挡,雷达难以分辨精细特征,而惯性传感器若单独使用则会随时间产生漂移。为了得到可靠的周围交通图像,车辆必须将这些不完美的观测合并为一个一致的估计,判断物体的位置及其运动状态。卡尔曼滤波作为一种数学工具已成为实时完成此任务的主力,但传统实现通常运行在数字处理器上,因频繁在模拟传感器与数字逻辑间传输数据而消耗大量能量并引入延迟。

一种新型电子构建模块
团队使用由单层二硫化钼(MoS2)构成的器件来解决这一问题。他们的记忆晶体管在一个三端结构中兼具存储元件和晶体管的功能,其电导可以平滑可调并在断电后保持记忆。通过用电场精确控制材料原子晶格中的微小空位,该器件能够可靠地保持1024个不同的电导级别,并在较宽的范围内维持超过一年的稳定性。同样重要的是,当控制电压扫描时,这些电导级别几乎呈线性变化,这使得可以将卡尔曼滤波所需的数学权重直接映射到记忆晶体管的物理设置上。
将数学变为硬件
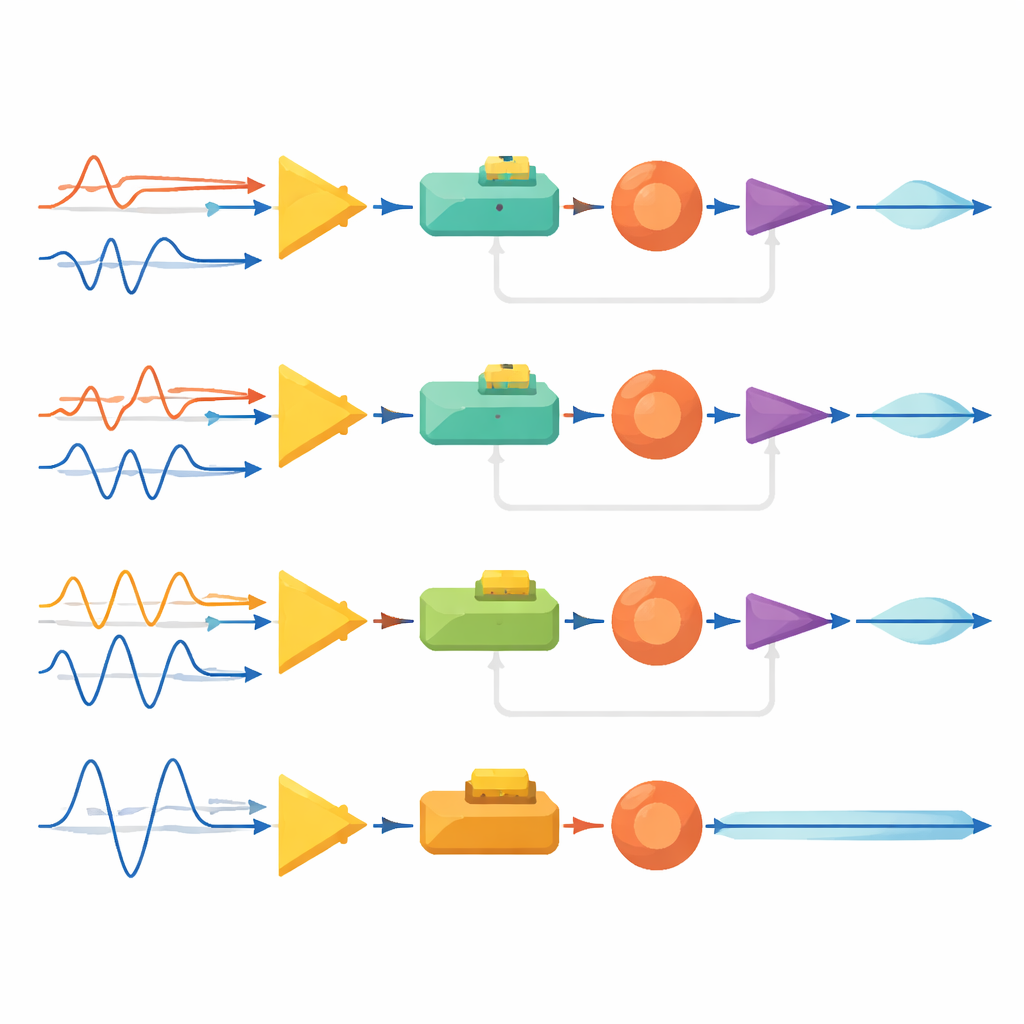
基于该器件,研究人员设计了一种模拟版本的多级卡尔曼滤波器,它直接在传感器电压上运行,而非数字数值。该电路由三个串联阶段组成,分别估计车辆的位置、速度和加速度。在每个阶段中,减法、积分、加法和微分等基本运算由紧凑的模拟模块完成。决定滤波器在多大程度上信任新传感器读数而非自身预测的关键“增益”因子,使用记忆晶体管的电导来实现。仅需调节栅极电压,系统就能平滑地改变对LiDAR、雷达或惯性传感器的依赖程度,而无需重写任何软件。
驾驶情景与恶劣条件
为了展示其实用性,团队在装配有MoS2器件和常规模拟元件的电路板上实现了完整的三级滤波器。他们输入模拟真实世界的噪声信号,模拟在高速公路变道超车时LiDAR、雷达和惯性传感器的观测。随着信号通过各个阶段,输出变得更为干净,生成一致的位置、速度和加速度估计,同时保留对安全至关重要的突变信息,例如急刹车。当某一传感器变得不可靠或被遮挡时——例如卡车短暂遮挡了LiDAR对另一辆车的视线——该系统尤为出色。通过在硬件层面降低受损传感器对应的增益,模拟滤波器会自动将依赖转移到其余输入和先前的运动模式上,从而保持速度和加速度估计的平滑性与物理合理性。
为机器打造更快、更高效的大脑
与标准数字实现相比较,基于记忆晶体管的模拟系统在完成相同滤波任务时能耗约降低13倍,计算速度约提高59倍,同时一次处理三个关键运动变量。由于这些器件体积小、稳定且兼容大规模制造,这种方法预示着未来可将“传感器内”或“近传感器”处理模块放置在汽车、无人机及其他联网设备的摄像头和雷达附近。对非专业读者而言,结论是:通过让先进材料的物理特性承担部分数学运算,工程师可以构建更聪明、更迅速且更高效的电子“脑”,即便在对世界的观察远非完美时,也能帮助自动系统更可靠地导航。
引用: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
关键词: 自动驾驶, 传感器融合, 卡尔曼滤波, 记忆晶体管, 模拟计算