Clear Sky Science · zh
二维相位展开算法在润滑油膜厚度测量中的应用
为什么油膜的隐秘生命周期很重要
每当汽车发动机运转或风力涡轮旋转,金属零件就在仅由一层微观油膜分隔的情况下发生滑动和滚动。这层超薄薄膜是平稳运动与破坏性磨损之间的最后一道防线。实时测量该油膜的形状与厚度出乎意料地困难:结构厚度为纳米级并持续变化。本文提出了一种新的图像处理方法,可以读取细微的光学图样,更准确可靠地绘制这些不可见油膜,即使在有噪声的真实工况下也能表现良好。
用彩色光环“看”厚度
该研究基于一种经典的光学方法:用白光照射通过一块玻璃盘、一层薄润滑剂和受压的钢球。来自油层上下表面的反射光相互干涉,产生类似肥皂泡看到的彩色环。每一点的精确色彩和亮度取决于光的传播路径长度,而这又取决于油膜的局部厚度。显微镜与相机捕捉这些多彩图样,生成一幅颜色编码厚度的图像——前提是能够正确解码这些颜色信息。
从色彩图到清晰的高度剖面
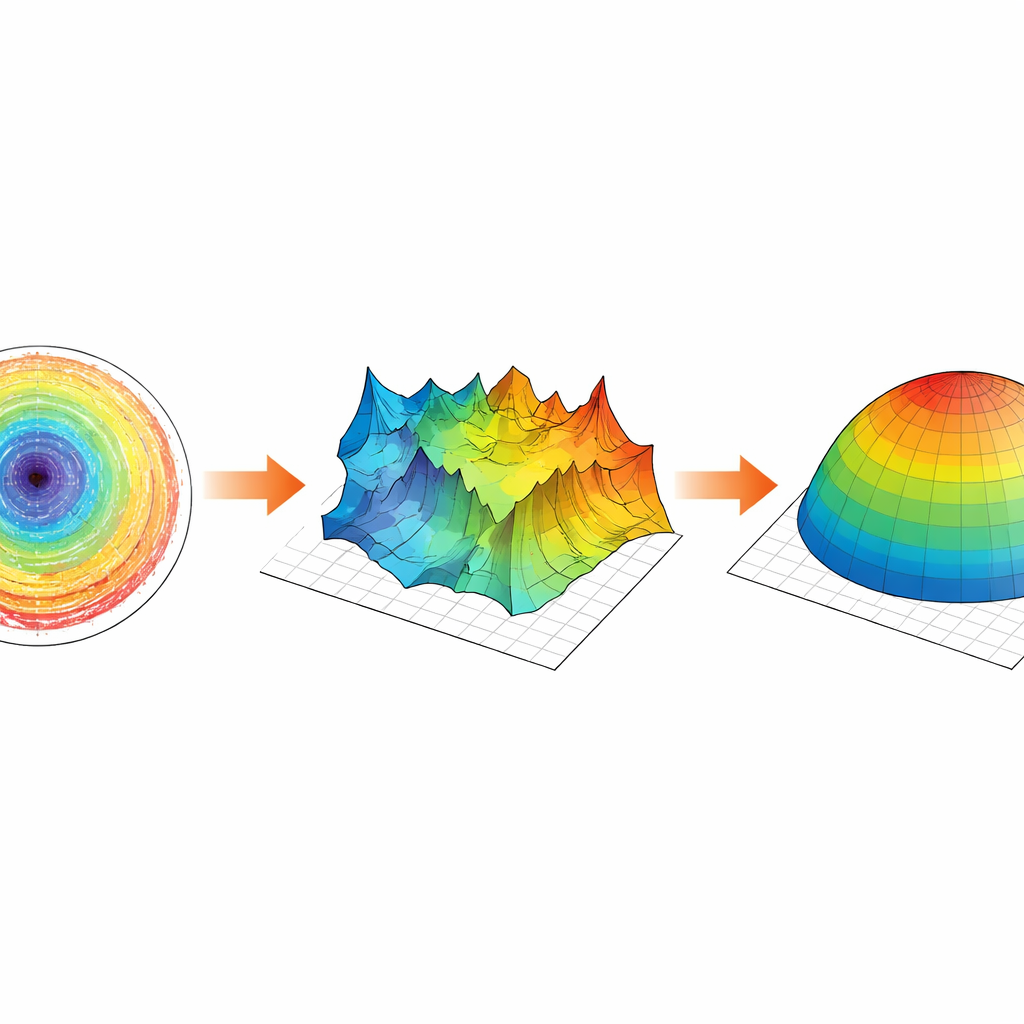
为将颜色转换为厚度,作者首先把图像转换为色相图,提取每个像素的主导颜色。色相表现得像一个会周期性回绕的角度,就像钟表的指针。这个“缠绕”的角度在膜面平滑处变化平缓,但一旦越过最大值便会突然跳变。需要一种称为相位展开的过程将这些缠绕角度转换为反映真实油膜轮廓的连续景观。传统的展开方法在图像有噪声、边缘模糊或油膜形状快速变化时表现欠佳——而这些正是实际润滑测试中的典型条件。
教算法学会信任哪些像素
工作的核心是一种基于已知方法SRNCP的改进展开策略,该方法通过优先沿着最可靠像素的路径展开图像。关键创新在于判定像素可信度的新方式。作者不仅考察相位在像素间的变化速率,还在小邻域内估计局部噪声水平。他们将这两方面信息合成到一个复合“质量图”中,优先考虑底层模式平滑且噪声低的区域。算法随后沿着最可靠的边缘连接像素构建展开路径,尽量延后处理退化区域,从而大幅减少误差扩散。
在实验室中证明其有效性
研究人员通过多阶段验证了该方法。在故意添加噪声补丁的模拟图像上,新方法比四种广泛使用的替代方法恢复出更平滑的三维相位表面,错误更少且速度更快。在来自自制显微干涉系统的真实干涉图像上,改进算法展开出更大可用区域、产生更平滑的相位图,并显著减少假跳跃。将这些展开后的相位转换为油膜厚度并与赫兹接触理论的预测比较时,新方法在偏差最小、与接触区预期形状(包括最大膜厚和接触中心的详细剖面)的一致性方面表现最佳。
这对机械与测量意味着什么
通俗地说,该研究提供了一种更可靠的方式来读取光在从微观油膜反射时留下的“指纹”。通过更智能地判断图像中哪些部分值得信任以及优先处理的顺序,算法能够以更高的精度和更少的伪影重建润滑层的三维厚度,即便在机器转速更高、图像更模糊的情况下也能如此。这有助于工程师和研究者更容易地监测油膜如何在真实机械系统中形成、演变以及有时失效,支持更好的设计、更耐用的零件和更高效的能源利用。
引用: Xie, L., Li, Z. & Lin, L. Application of a two-dimensional phase unwrapping algorithm to lubricant film thickness measurement. Sci Rep 16, 10745 (2026). https://doi.org/10.1038/s41598-026-44783-z
关键词: 润滑油膜厚度, 光学干涉测量, 相位展开, 弹性流体润滑, 图像重建