Clear Sky Science · zh
通过无线物联网与深度学习实现智能高效的垃圾管理
为何高科技垃圾分拣至关重要
我们大多数人把垃圾扔进垃圾箱就不再多想,但随后的处理方式决定了环境、健康,甚至城市预算的走向。全球各地日益堆积的混合垃圾使回收更加困难、填埋场容量更快被填满。本文探讨了摄像头、无线传感器与一种人工智能如何协同工作,识别我们丢弃的垃圾类型并自动将其送到合适位置,从而让垃圾流转变得更智能、更安全。
日常垃圾日益严峻的挑战
城市每年产生数十亿吨固体废物,且预计到本世纪中叶这一数量将大幅上升。在许多地区,工人仍需手工分拣垃圾,这是一项缓慢、成本高且存在风险的工作,会使他们接触到锐器、刺激性气体和疾病。现有的计算机辅助工具也尝试提供帮助,但在面对实际垃圾的凌乱多样外观时常常力不从心。许多方法假设数据具有简单、规整的特性,或者模型过于庞大与缓慢,不适合部署在垃圾箱、运输车辆或分拣厂中运行的实际系统。
智能“眼睛”和互联机器
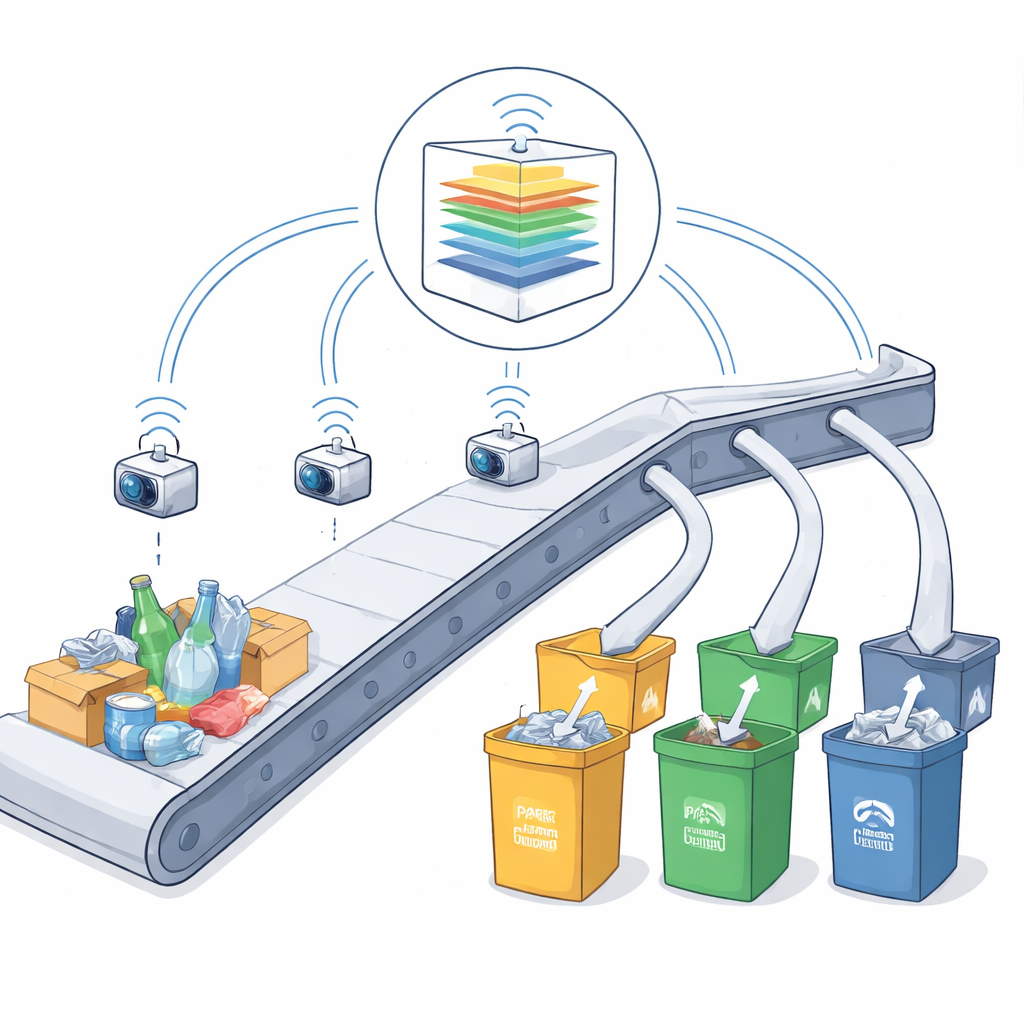
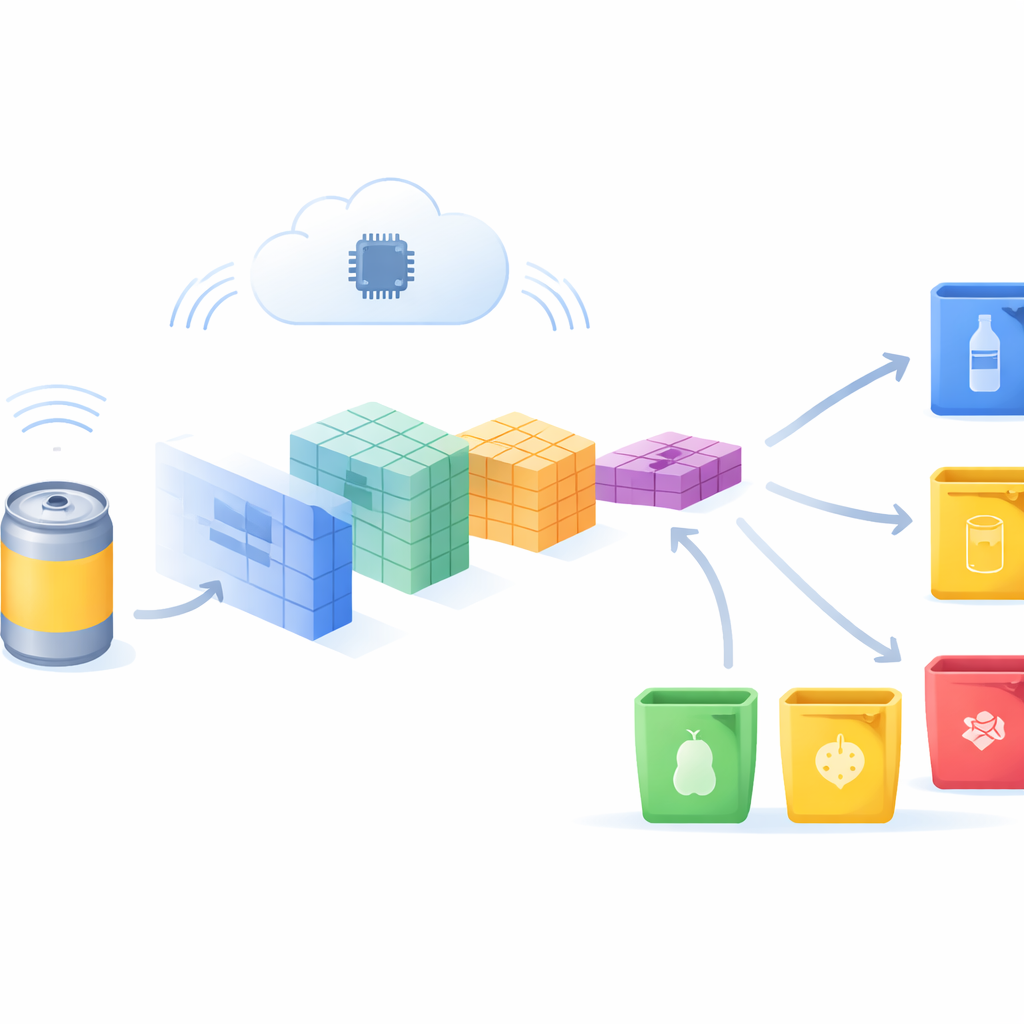
研究提出了一个完整的垃圾分拣方案,结合了三大要素:联网摄像头、中心计算机与机械分拣线。放置在收集点附近的高分辨率摄像头捕获传送带上每件物品的图像。附近的微控制器对这些图像进行预处理并通过无线方式发送到更强大的计算机。在那里,图像识别模型分析每张图片并判定其为纸板、玻璃、金属、纸张、塑料或一般垃圾。基于该判定,控制信号驱动翻板、输送带或机械臂,使每件物品在实时条件下落入正确的垃圾箱,无需人工接触。
学习引擎如何“看见”你的垃圾
该系统的核心是一个分层的模式识别引擎,灵感来自动物视觉的工作方式。引擎的早期层侧重于边缘和纹理等简单特征,而更深层则将这些特征组合成更复杂的形状,以匹配瓶子、罐头和箱子等物体。研究人员用一个公开的、标注了2400多张照片的集合对该引擎进行了训练,这些照片展示了六类垃圾在多种形状、尺寸和光照条件下的样貌。在训练过程中,他们反复向模型展示这些示例,并通过旋转、缩放和翻转等方式对图像进行轻微变换,以避免模型被视角的小变化所迷惑。他们还使用了正则化技巧,在训练时随机关闭模型的部分单元,防止对数据集的记忆化并帮助其应对新的、未见过的图像。
哪些方面表现良好,哪些仍会出错
在独立测试图像上,系统总体上正确标注了略高于一半的物品——乍看之下成绩适中,但较许多基于更简单规则或模型的旧方法已有明显提升。系统在识别纸板和纸张类物品时尤为强劲,能抓住大多数此类物品且很少产生误报。系统对金属、玻璃和混合垃圾的识别也相对不错,但在塑料方面则表现较差,常将塑料与其他有光泽或皱褶的材料混淆。对错误模式的深入分析表明,外观上相似的物体——例如金属罐与玻璃瓶,或不同类型的塑料包装——仅凭标准的彩色图像也很难被模型准确区分。
展望更清洁、更智能的城市
直白地说,这项工作表明,基于摄像头、无线连接并由现代模式识别软件驱动的分拣线,已能接管大量分离家庭垃圾的肮脏工作。虽然当前版本并不完美,尤其在棘手的塑料识别上仍有不足,但它证明了此类系统可以持续运行、扩展到大规模垃圾流并适应新条件。随着更丰富的训练数据、更好的模型设计以及可能加入额外的传感方式,未来版本有望实现更高的准确性与可靠性。这将意味着回收污染减少、工人面临的危险降低,并为我们每天丢弃的普通垃圾袋开辟一条更可持续的道路。
引用: Latha, P., Benni, N.S., Asuti, M.G. et al. Smart and efficient waste management through wireless IoT-enabled deep learning. Sci Rep 16, 11118 (2026). https://doi.org/10.1038/s41598-026-43827-8
关键词: 智能垃圾管理, 物联网, 深度学习, 自动化回收, 基于图像的垃圾分拣