Clear Sky Science · zh
使用双自由度机器人装置进行部分重力模拟的与硬件无关控制
为什么在地球上模拟较轻重力很重要
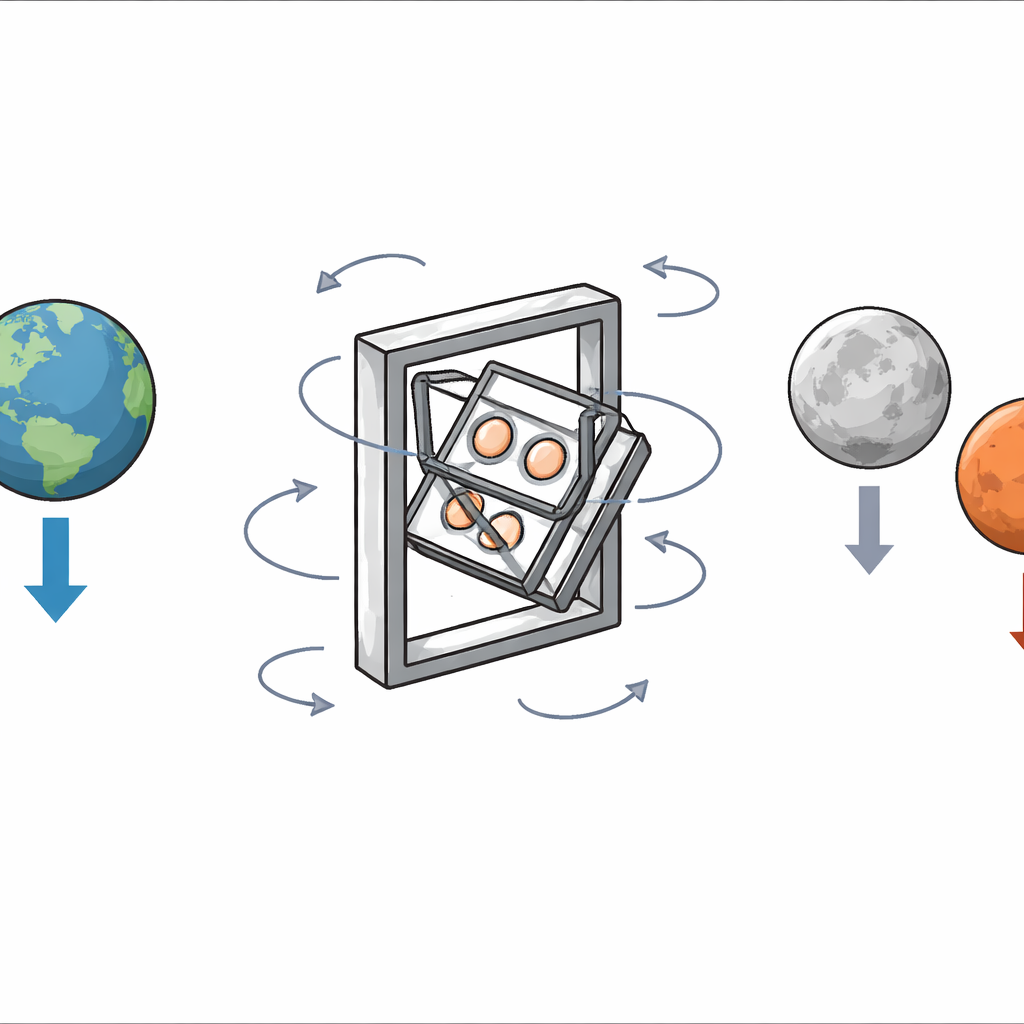
随着人类规划更长时间的登月和火星任务,我们迫切需要了解不同重力水平会如何影响人体。太空中进行此类测试成本高且机会稀少,因此科学家在地面上使用特殊的旋转装置,称为旋转培养器(clinostat),以便为细胞和微小组织模拟低重力。本文提出了一种新的装置控制方法,使其能够可靠地模拟不仅是失重,还能模拟月球、火星乃至接近地球的较弱重力——而不依赖于特定的电机或硬件组件。
通过旋转实现“伪重力”
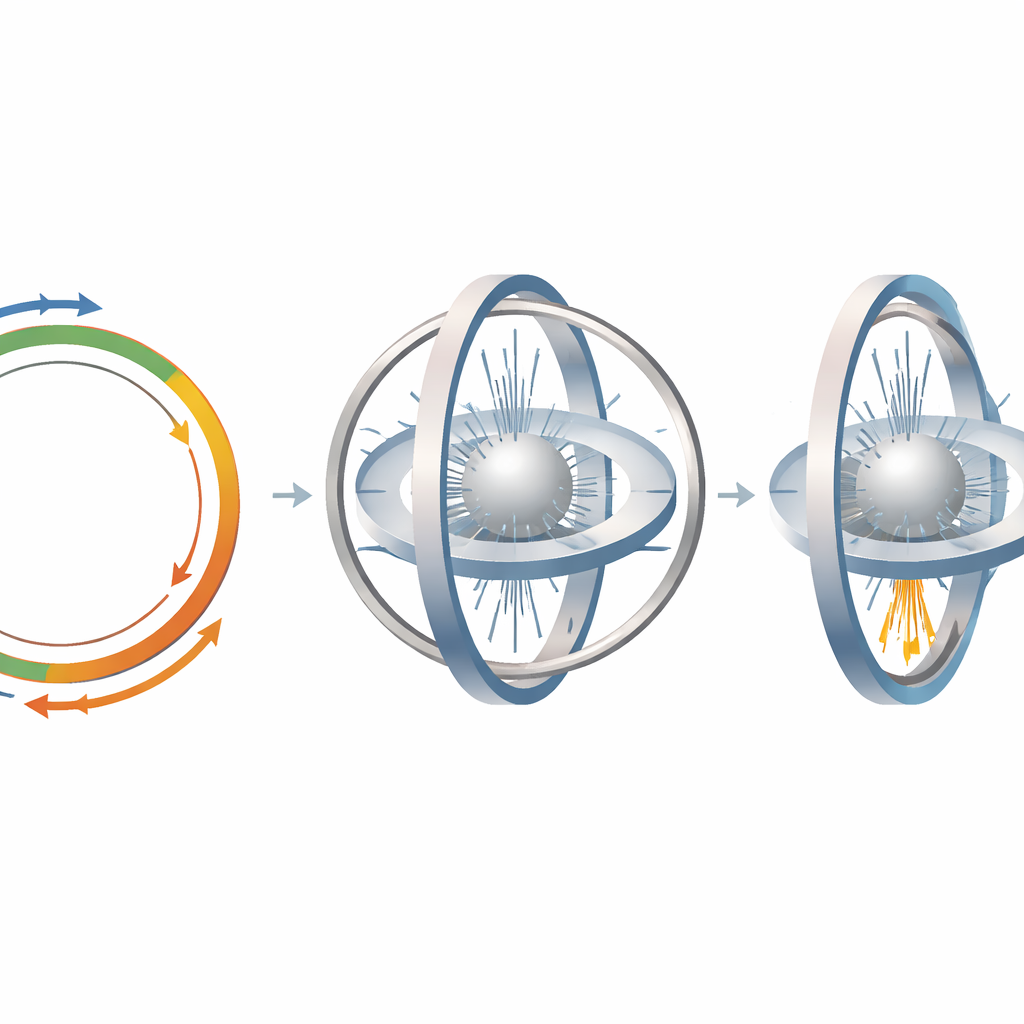
在地球表面附近,重力几乎处处向下。三维旋转培养器将小样品(例如培养皿中的细胞或类器官)放在两个互相垂直的轴上缓慢旋转。由于样品的朝向不断变化,细胞“感受到”的重力方向也在不断转移,随着时间推移这些方向的效应会被平均掉。当旋转按特定方式安排时,时间平均的重力可以接近零,模拟轨道微重力。多年来,这一简单思路被用来在地面研究肌肉流失、骨质变弱、免疫变化等类太空效应。
从失重到“类月球”重力
近来,研究者意识到仅研究失重还不够。月球或火星上的宇航员将生活在一种减弱但并非不存在的重力环境中。为弥补这一差距,引入了时间平均模拟部分重力的概念:不是让平均牵引消失,而是使重力在某一方向出现的频率略高于其他方向。这种偏置会产生介于零到地球重力之间的平均牵引,使科学家能够模拟例如月球的0.17 g或火星的0.38 g。早期的控制方法可以做到这一点,但它们高度依赖于所用电机和机械结构,并且无法产生大约0.44 g以上的部分重力。
控制旋转的新方法
本研究的核心创新是根据外部电机的角度而不是时间来控制其运动。以往的方法规定电机在每一时刻应旋转的速度,但实际硬件从未能完美执行这些计划:微小的延迟和电机限制会导致角度漂移,误差会累积,研究者不得不为每台设备添加专门调校的反馈回路。在此处,作者重新设计了控制规则,使角速度直接作为当前角度的函数给出。这个看似小的改变大大减少了误差增长,使方法在很大程度上不依赖电机功率和惯量。同时,内电机以类似随机的模式驱动,使重力轨迹不重复,提升实验可靠性。
将重力推得更接近地球
通过计算机仿真,团队绘制了关键控制参数α如何影响最终平均重力的图谱。增加α可以将模拟的部分重力提高到约0.68 g——已经远高于之前的0.44 g 限制。为进一步提高,他们引入了“停顿时间”技巧:每当外框达到使重力与期望平均牵引对齐的角度时,电机会短暂停止。在此暂停期间,样品在该方向上感受到稳定的牵引,从而增强偏置。仿真显示,较长的停顿会使有效重力更接近地球的1 g,实验则在最精确的范围内证实了约0.81 g 的值,与预测结果的差异仅约1%。
测试月球、火星及更远的目标
研究者构建了一个由商用伺服电机驱动的双轴旋转培养器,并在中心处安装惯性传感器来监测重力方向。他们测试了一系列α值和停顿时间,测量平均重力达到稳态的速度及实验与仿真的接近程度。对于对应0.33–0.63 g 的中等α值,失配通常约为1%或更小。针对类月和类火星设定的仿真与实验产生了接近0.17 g和0.38 g的平均牵引,同时保持每次运行间的重力路径差异。作者还探讨了由电机分辨率和响应延迟设定的实际极限,并给出了选择驱动器和安全裕度的简单指南,以便其他实验室能复制精确的部分重力水平。
这对未来航天健康的意义
简而言之,这项工作将一个复杂且对硬件敏感的旋转装置转变为更易上手的部分重力模拟器。通过将电机速度与角度关联并加入受控的停顿,该方法可以忠实地模拟从深空到月球、火星乃至接近地球的一系列重力水平,而无需不断手动调校控制回路。这种灵活性使更多研究团队更容易研究细胞、组织和类器官对特定重力水平的反应,帮助我们预测健康风险并为长期太空任务设计对策。
引用: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
关键词: 部分重力模拟, 旋转培养器, 空间生物学, 微重力研究, 机器人运动控制