Clear Sky Science · zh
使用倾斜边缘空间频率响应作为清晰度度量,从交通标志定量估计模糊核
为什么模糊的车载摄像头很重要
现代汽车越来越依赖摄像头来发现行人、识别交通标志并保持车道。但像人眼一样,摄像头的视力会随着年龄、温度、振动或小幅装配偏移而逐渐下降。本文探讨了一种新的方法,通过观察日常交通标志来“测量”汽车摄像头的模糊程度,可能使厂商能够随时间监控摄像头状况,而不必等到出现故障。
把交通标志变成测试图
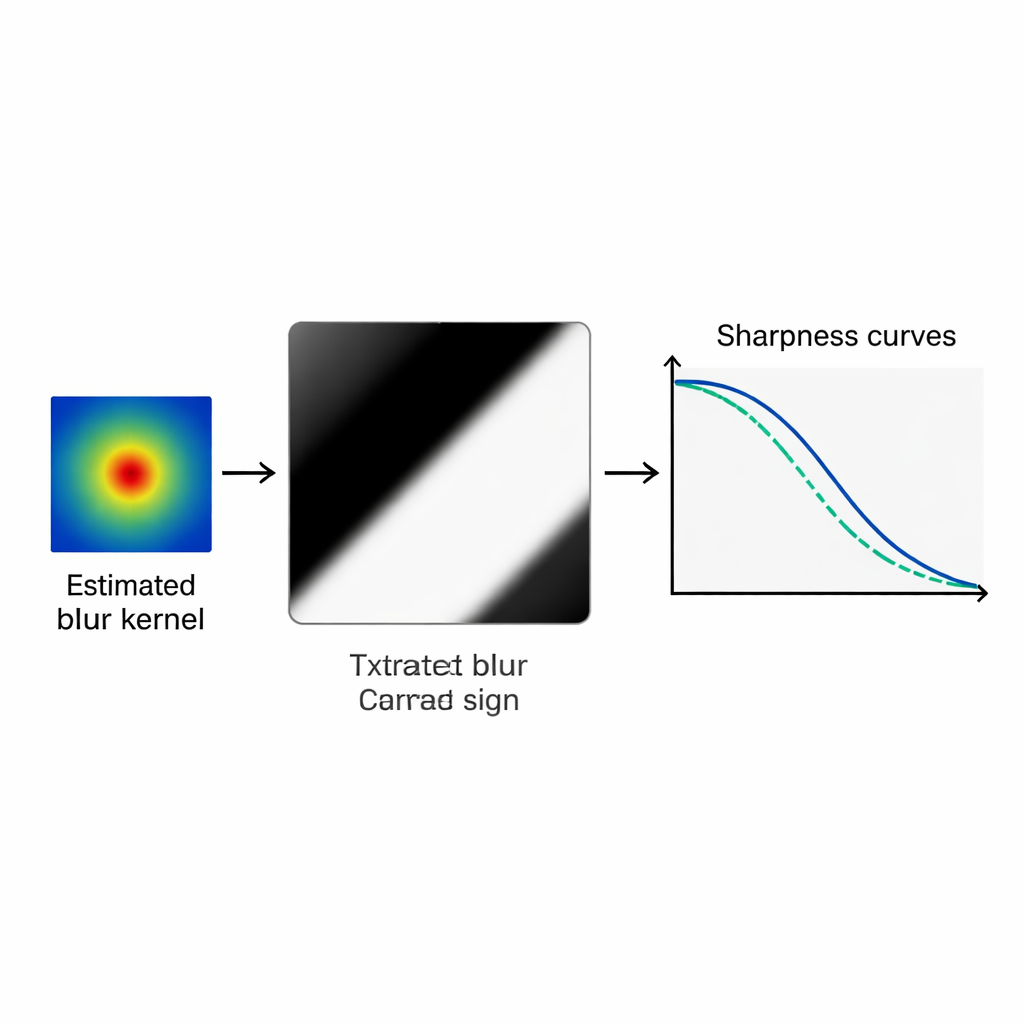
在工厂里,摄像头在出厂前会用专门的测试图案检查清晰度。但在道路上没有这种受控目标——只有真实世界。作者利用了一个常见且可重复的对象:具有干净高对比边缘的交通标志。他们关注一种标准清晰度度量,称为空间频率响应(SFR),它本质上描述了摄像头在图像中保留细节的能力。通过分析交通标志上略微倾斜的(“斜置”)边缘,可以像实验室测试那样计算SFR,但直接来自真实驾驶场景。

捕捉镜头如何扩散光线
摄像头中的模糊可以用一个小图像来描述,称为模糊核或点扩散函数。它显示场景中单点光在传感器上如何被扩散到相邻像素上。直接从模糊照片估计该核通常很困难,因为许多可能的清晰图像与模糊模式组合都能产生相似结果。为了解决这个问题,研究人员首先用光学设计软件为特定汽车摄像头在不同对焦设置和图像位置上模拟了约1300个真实的模糊核。然后,他们使用一种称为主成分分析(PCA)的统计工具将这一大集合压缩为一组精简的关键模式,从而使任何现实的模糊都可以用几十个数字而不是数百个像素值来描述。
匹配清晰度曲线而不是像素
一旦建立了精简的模糊“词典”,实际估计过程从两个小补丁开始,每个为45 × 45像素,取自模糊的交通标志图像,并配有同一标志的清晰参考图像中的匹配补丁。对于从PCA模型中抽取的候选模糊核,将清晰补丁进行人工模糊并计算其SFR曲线。然后将这些曲线与从真实模糊补丁测得的SFR曲线进行比较。一个称为差分进化的全局优化方法调整核参数,以最小化两组曲线之间的差异。实际上,该算法寻找那种能使合成清晰度曲线与实际相机图像测得曲线尽可能对齐的模糊模式。
该方法效果如何?
作者首先在合成数据上测试了他们的方法,在这些数据中他们准确知道真实模糊核。跨越十个不同的模糊等级,从非常清晰到明显散焦,估计出的模糊核通过多个独立的相似性度量与真实值高度一致,结构相似性(SSIM)值通常在0.95以上且平均误差很低。他们还将该方法与最近的计算机视觉“盲去模糊”最先进技术进行比较,后者主要旨在让图像看起来更好而非恢复精确的模糊形状。在为该特定摄像头精确重建潜在模糊核的任务上,基于PCA的新方法明显优于这些基线方法。最后,他们将算法应用于经过改装、可通过微小位移改变传感器来引入已知散焦的真实汽车摄像头图像。尽管在这里无法获得真实的模糊核,估计出的核生成的合成边缘在清晰度曲线和视觉外观上在广泛的对焦设置下仍与实际模糊边缘非常接近。
从实验室技术到摄像头健康检查
对非专业读者来说,主要结论是作者现在可以把普通交通标志变成一种诊断工具,揭示汽车摄像头光学系统随时间的变化,而不仅仅是判断图像看起来是清晰还是模糊。与单一的通过/不通过数值不同,估计出的模糊核编码了关于镜头内光线如何扩散的详细信息,这又可以与散焦或特定光学缺陷相关联。虽然当前方法计算量大且仅适用于清晰边缘周围的小补丁,但它指向未来的系统:车辆偶尔发送图像到服务器,跟踪摄像头清晰度的缓慢退化。这可以为预防性维护提供信息,支持更安全的高级驾驶辅助系统,并最终帮助确保自动驾驶车辆的数字“眼睛”在多年服役中保持良好状态。
引用: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
关键词: 汽车摄像头, 图像清晰度, 模糊核, 交通标志成像, 摄像头健康监测