Clear Sky Science · zh
使用概率密度函数的面向物体的语义映射用于室内重定位与路径规划
为何更聪明的室内地图很重要
随着家庭和服务机器人从实验室走入真实公寓,它们必须不仅仅避开墙壁和家具。要真正有用,机器人应理解床通常意味着卧室,或冰箱暗示厨房。本文提出了一种新方法,让机器人通过定义房间的物体“看见”室内空间,从而判断自己所在位置并选择更符合人们使用习惯的路径。
通过日常物品看见房间
传统的机器人地图要么侧重于几何形状,要么侧重于抽象符号。由激光扫描构建的栅格地图捕捉到详细形状,但在存储和搜索上变得庞大,并可能将机器人推入僵硬的网格化路径。以房间和门为节点的高层图更易处理,但会丢失精确行驶所需的细节。作者在此二者之间架起桥梁:将地图围绕房间和其中的关键静态物体(床、沙发、冰箱、桌子等)组织。每个房间在平面图上轮廓清晰,对每类重要物体单独建立图层,使不同种类的家具不会相互覆盖。
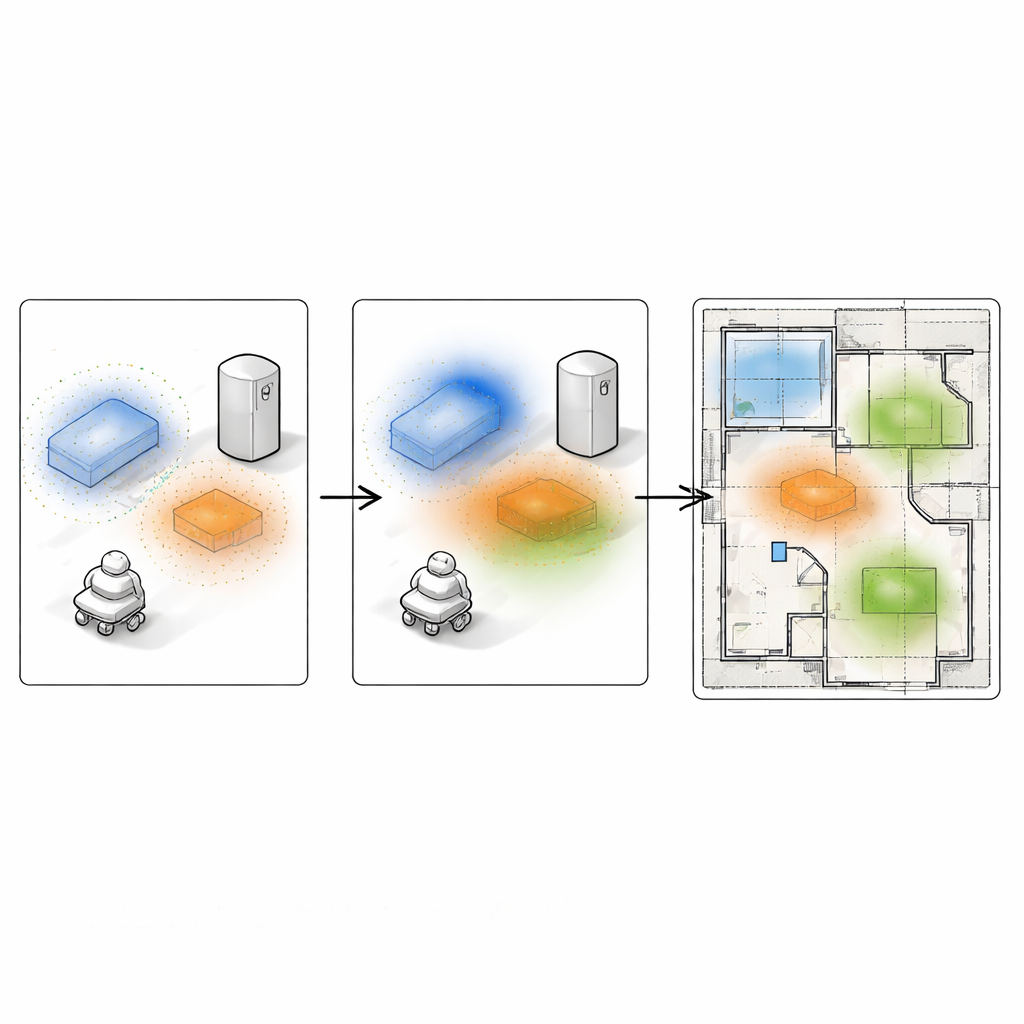
将家具转化为柔和的概率云
该方法并不把每个物体画成硬边框,而是将家具的三维扫描转成地面上的平滑“热图”。机器人首先使用 RGB‑D 摄像头和常规工具重建房间的三维结构,然后对属于墙壁、床或椅子等物体的点进行语义标注。对于房间内每种物体类型,系统找到点簇并将其投影到地面。由这些点簇估计出连续的概率密度——一种在物体最可能出现处值最高、向外逐渐衰减的软斑。按物体类型叠加这些斑块就得到一种紧凑的分层地图,同时保留物体语义和近似形状,并自然地处理噪声和部分视角遮挡。
让机器人重新发现自己的位置
这种以物体为中心的地图的一个主要用途是帮助机器人在对楼层平面图毫无头绪时重新定位——这在机器人刚唤醒或被挪动后很常见。机器人用深度相机重新观察,检测视野中的物体,并为该部分场景构建一组小的概率斑块。然后,进化式搜索算法在整栋楼的地图上探索许多可能的机器人位姿。对于每个候选位姿,将局部斑块叠加到全局地图上,并使用统计距离测量它们的相似性。房间边界和视线检查会排除不可能的位姿,例如通过墙看到冰箱。经过多代演化,候选位姿群体朝着观察到的物体与存储的概率场最匹配的位置收敛,从而给出机器人位置与朝向的稳健估计。
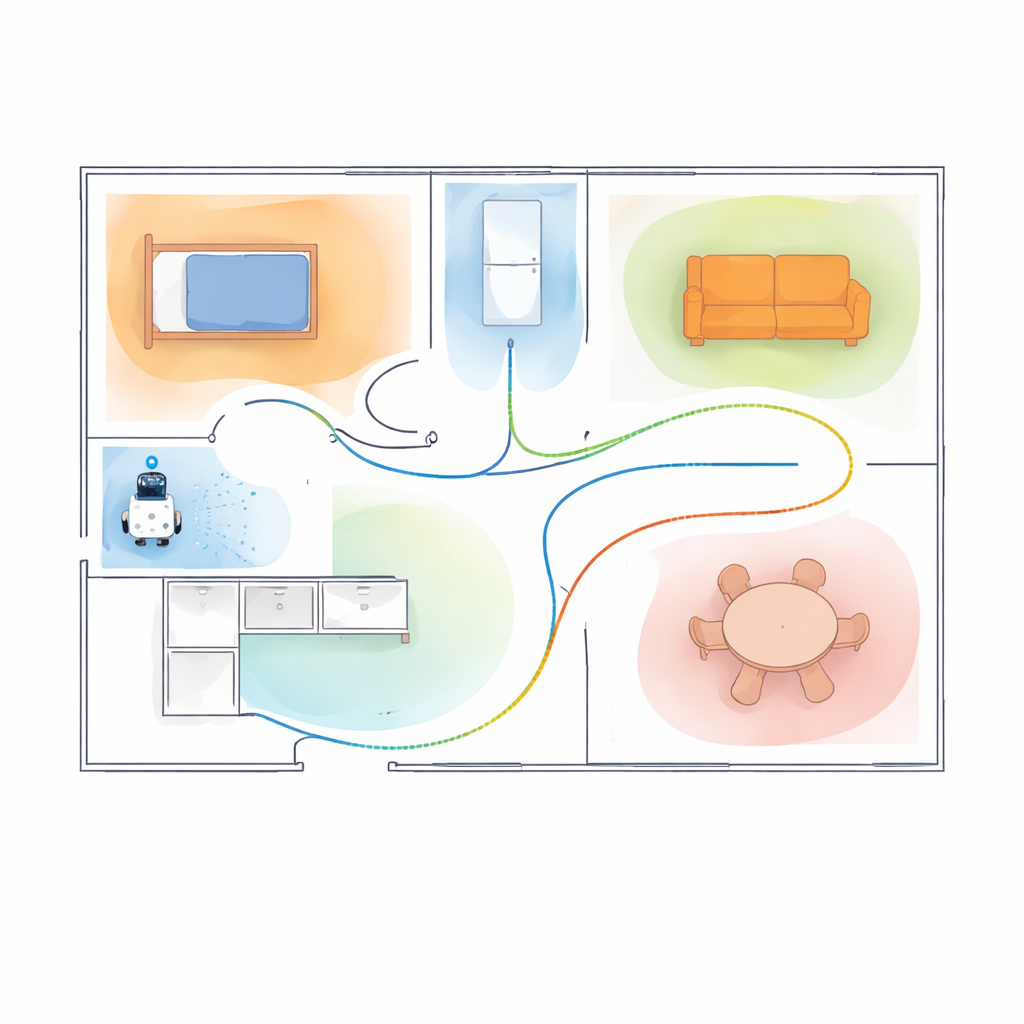
规划尊重人们使用空间方式的路径
同一张地图也指导机器人的移动。因为每种物体类型都以平滑的影响场表示,机器人可以通过调整数值权重来偏好或回避某些区域。比如晚上床可以成为应避开的区域,而寻找物品时桌子可以成为吸引区域。这些语义偏好与标准障碍地图和墙壁周围的安全边距结合,形成在平面图上的单一代价景观。经典路径规划器随后找到不仅无碰撞而且符合预期社交或任务偏好的路线。基于现实数据集和真实布置公寓的实验表明,这些语义偏向的路径更能遵循设定偏好,尽管有时路径长度略有增加,但在真实居家环境中可能更平滑。
这对日常机器人意味着什么
简单来说,这项工作教会机器人像人一样看待家居:把房子视为由家具定义的房间,而不仅仅是有墙壁的空箱子。通过为每件关键物体包裹一个柔和的概率云,单一的紧凑地图既能支持“我在哪里?”又能支持“我该如何到达?”,无需单独的任务特定模型。测试表明,这种方法能帮助机器人在杂乱或相似房间中更可靠地定位,并选择更符合人类期望的路线。随着这些思想的成熟,未来的家用机器人在移动时可能更有礼貌、更智能,在我们的空间中行动时给人更少机械感的体验。
引用: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
关键词: 室内机器人定位, 语义映射, 面向物体的导航, 概率机器人地图, 路径规划