Clear Sky Science · zh
用于具不确定性感知的行星漫游车导航的深度概率可行性与测试时自适应
为什么更安全的漫游车行驶很重要
当我们把有轮机器送到月球或火星时,它们必须在没有人类帮助的情况下穿越沙地、岩石和坡面。对地面软硬程度的一个错误判断就可能让价值数十亿美元的漫游车永久陷入停顿——正如 NASA 的机会号漫游车曾在起伏的沙地中被困数周所示。本研究提出了一种新方法,使漫游车能够“感知”前方地面的风险,做出更安全的路径选择,甚至在行驶过程中从错误中学习。
软地面的隐性危险
在其他天体上,最危险的障碍物并不总是相机容易看到的巨石或悬崖,而是看起来光滑却松散的土壤斑块。当漫游车车轮在这种地形打滑时,车辆会滑移、以远低于指令的速度缓慢前进、消耗更多能量,甚至可能永久失去行驶能力。传统的导航系统主要关注可见的几何危险——看起来像障碍物的东西——但并未充分捕捉地面在车轮作用下的真实表现。同时,尝试从图像和三维地图预测车轮打滑的机器学习方法在不熟悉的条件下(如新的光照或更陡的坡度)可能会出错,而且它们通常不会说明其预测的不确定性。
教会漫游车以风险为依据进行推理
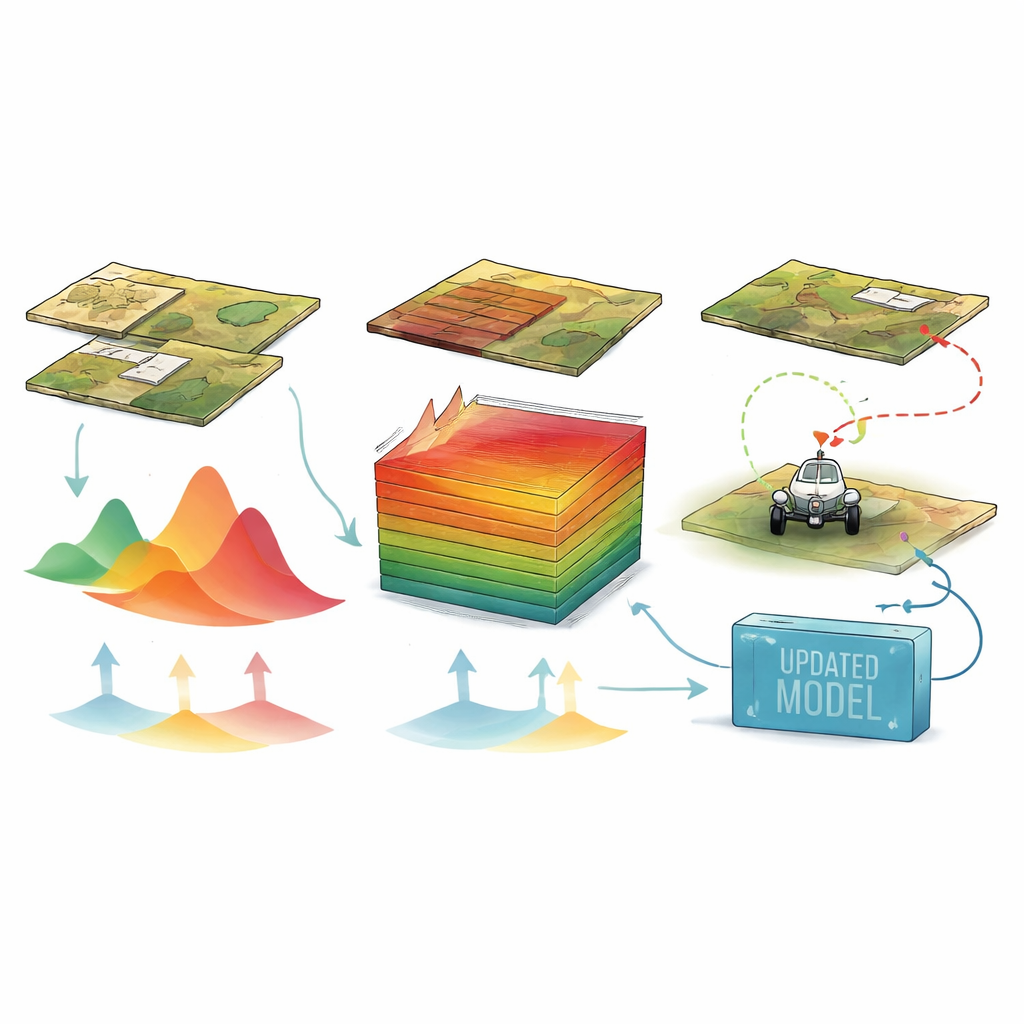
作者提出了一个称为深度概率可行性的整合学习与规划框架。该模型不是为每个地块给出单一的“最佳估计”车轮打滑值,而是基于彩色影像和局部坡度预测可能打滑值的完整概率分布。一组深度神经网络从俯视角观察地形,并为网格上每一个可能的移动输出期望打滑值及其不确定性。系统将该分布转换为有效行驶速度,并最终换算为每一步的行程时间代价。漫游车可能被困的区域会被赋予很高的代价;那些预测既有利且置信度高的区域代价较低。然后,标准的路径搜索算法在距离短与低失去机动性风险之间进行权衡,找到合适的路线。
让漫游车在行驶中学习
行星探测的一个主要挑战是,漫游车到达时看到的条件可能与训练数据存在显著差异:坡度可能更陡,土壤性质陌生,或光照非常不同。为应对这一点,该框架包含了一种测试时自适应机制。随着漫游车行驶,它会测量实际遇到的打滑情况。在每次短距离移动后,这些新鲜测量用于轻微调整神经网络中新增的“尺度和平移”层,同时保持原有权重不变。该策略使模型能够仅用少量观测快速适应新地形,同时保留对先前见过条件的已学知识。更新后的预测再反馈到重规划中,使所选路径能够实时改进。
将系统置于严苛测试中
由于真实漫游车数据覆盖的地形类型有限,团队构建了一个大型的类火星合成数据集。他们将计算机生成的粗糙地形与十种隐藏地貌类别相结合,每种类别具有各自的颜色和打滑行为,并改变坡度陡峭度与光照方向以创造熟悉与不熟悉的场景。在数千次模拟任务中,新方法与两种或忽略不确定性或较为间接利用不确定性的最先进规划器进行了比较。在熟悉的条件下,各方法表现相近。但在最具挑战性的情况下——光照昏暗且类似陨石坑的陡坡地形——深度概率可行性方法取得了更高的成功率和更低的最大打滑,同时保持有竞争力的行驶时间。当启用在线自适应时,系统进一步降低了预测误差并提高了安全性,尤其在与训练环境差异较大的场景中表现突出。
这对未来任务意味着什么
对普通读者而言,关键信息是:这项工作为行星漫游车提供了一种更谨慎且具自知之明的行驶方式。漫游车不再盲目信任单一关于车轮抓地能力的预测,而是同时权衡预期行为与不确定性,选择既快速又不太可能使其受困的路线。通过不断从自身的打滑经验中学习,它们可以在没有人类救援的情况下适应新型沙地、坡面和光照。随着各航天机构规划更长、更具雄心的着陆与地面任务,这种不确定性感知的导航有望帮助宝贵的机器人把更多时间花在探索新的科学目标上,而不是花时间自救。
引用: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
关键词: 行星漫游车导航, 地形可行性, 不确定性感知规划, 机器学习 机器人学, 自主探索